基于电成像测井的图像形状特征提取与应用
2019-04-09张明肖小玲
张明,肖小玲
(油气资源与勘探技术教育部重点实验室(长江大学),湖北 武汉 430100)
碳酸盐岩储层储集空间类型多样,非均质性强,很多专家和学者都对礁滩储层的测井评价进行了深入研究[1],但大部分都是根据常规测井曲线简单地进行地层划分和定性解释,无法满足科研和生产的需要。高井眼覆盖率和高纵向分辨率是电成像测井的2大特点,在地质研究和储层评价[2]中的应用较为广泛。利用电成像测井资料能够准确地描述地层的沉积特征,且电成像测井对泥质、致密层、缝合线、裂缝、层理、方解石及燧石结核等均有十分明显的特征响应,是识别岩性和划分沉积相的重要手段之一[3]。此外,电成像测井在储层评价(对裂缝和溶蚀孔洞的响应特征十分明显,可以精确计算孔隙度、渗透率参数[4])和地应力研究[5](比较直观地识别出褶皱、断层等地质构造)中也发挥着重要作用。
通常情况下,形状特征可分为轮廓特征和区域特征2类。轮廓特征主要针对图像物体的边界信息,区域特征则需要考虑整个图像形状区域。形状特征描述方法主要包括形状不变矩法、傅里叶形状描述符法、几何参数法[6]。该次研究主要是对电成像测井图像进行滤波、阈值分割等处理,然后提取其几何参数。电成像测井图像比较复杂(具有噪声和背景干扰),为了提取其形状特征,并且尽量减少人为因素的干扰,笔者利用OTSU算法(大津算法),结合分水岭的图像分割算法,自动从电成像测井图像上分离出有效的测井特征,然后计算其形状特征,最后自动识别岩性及划分沉积相。
图1 原始电成像测井图
1 电成像测井图像分割算法
在电成像测井图像上,低电阻率为暗色,高电阻率为亮色。图1为图像修复后的电成像测井图,可见图像上有许多噪声干扰,使得电成像图像特征的提取变得较为困难。为了减少噪声对图像分割的影响,先进行2次中值滤波再对图像进行分割。
1.1 分水岭算法原理
分水岭算法基本思路是:将电成像测井图像比喻为地形图,图像的灰度值看作是地形的高度值,极小值则表示地形中的低谷;如果水不断地从低谷中流出,并且逐渐填满与低谷相关的集水盆地[7],最终水会聚集在不同的集水盆地;集水盆地之间的交界线称为分水岭,分水岭将整个地貌表面分割出多个集水盆地。分水岭将地形图分割成各个集水盆地的过程相当于图像的分割。

图2 图像分割算法电成像测井图
分水岭算法是一个迭代标注的过程。分水岭比较经典的计算方法是Vincent提出的[8]。该算法主要分为排序和淹没2个过程:首先对电成像测井图像中每个像素的灰度级进行排序(按照从低到高的顺序),然后实现淹没(从低到高),在淹没过程中采用FIFO(先进先出)结构对每一个局部极小值的影响域进行判断,再进行标注。电成像测井图像经过分水岭变换后,得到的是输入图像的集水盆地图像,分水岭(输入图像极大值)表示集水盆地之间的交界点。因此,把梯度图像作为输入图像即可得到图像的边缘信息。该算法对图像微弱边缘的响应比较敏感,可以保证得到的图像封闭连续边缘,但是图像中的噪声以及细小的灰度值变化都会造成过度分割现象。过度分割会产生大量的细小区域(会对后面特征提取造成影响),通常可以采用2种处理方法消除过度分割:一是人为地去除一些无关的边缘信息;二是修改梯度函数,使得集水盆地只对探测的目标做出响应。为了降低分水岭算法产生的过度分割,并且消除灰度微小变化产生的过度分割,笔者对梯度图像进行了阈值处理。
1.2 OTSU算法与分水岭算法结合的图像分割算法
OTSU算法与分水岭算法结合的图像分割算法[8]具体步骤为:①将电成像测井图像转换为8位伪彩色图像,对其进行滤波处理以消除噪声影响;②将得到的伪彩色图像从RGB颜色空间转换到LUV颜色空间,再利用分水岭算法对LUV颜色空间图像进行处理,得到24位真彩色分割图像并将分割后的图像转换为8位灰度图像;③利用图像分割算法对该灰度图像进行分割得到形状特征明显的二值图像。图2为该算法分割后的电成像测井图像,可以明显看出泥质条带块的特征,即为中间黑色部分。
2 形状特征提取及判别分类
经过上述方法对图像分割处理后,电成像测井图像转化为具有测井图像特征的二值图像。为了便于计算测井图像的形状特征,需要对图像特征进行标记;再对每一个电成像测井图像特征进行计算,得到其形状特征的相关参数;最后利用最小欧式距离法[9]进行判别分类,判别函数根据特征向量进行自动分类。该方法具有较好的分类效果,且计算简便。
2.1 基于等价对的特征标记算法
为了提高计算速度与精度,在传统八连通域标记算法的基础上,将临时标记与最终标记的等价关系[10](等价对)储存在链表结构中,即为基于等价对的特征标记算法。该算法能提高标记速度,并且不受图像大小的限制。然后进行轮廓追踪[11~13],提取图像特征的轮廓信息。具体步骤为:
1)初步标记。将电成像图像中每个像素点都赋予临时标记并用等价表记录其等价关系,然后遍历图像中的每个像素点;若为目标像素,则按照上、右上、右、右下的顺时针规则搜寻其八邻域;若邻域被标记,则将其赋为邻域标记,并且记录两者的等价关系;若邻域均未被标记,则将其赋予新的标记。

图3 电成像孔洞特征相关参数提取示意图
2)最终标记。确定所有等价关系中初步标记的最小值,将其全部等价为最小值,并对电成像图像特征重新标记,确定初步标记与最终标记之间的关系。
3)图像代换。再次遍历电成像图像中的每个像素点,将初步标记用最终标记替换,经过上述步骤后,电成像图像特征按照从左到右、从上到下的顺序被标以连续的自然数。
2.2 形状特征相关参数的计算
经过基于等价对的特征标记处理,得到电成像测井图像特征的轮廓,但不能直接用于分类判别,需要对每一个电成像测井图像特征进行相关计算,最终得到其形状特征的相关参数。
1)周长。计算形状特征的周长,也就是计算形状特征轮廓的长度。提取出图像形状特征的轮廓后,统计其像素点数量,即为周长。
2)面积。面积是形状特征区域的一个基本特征,它可以表示区域的大小。统计特征区域内的像素点数目,即为面积。
3)面孔率。面孔率可用电成像图像形状特征的面积与电成像测井图像面积的比来计算。
图3为在Visual Studio 2010上实现上述算法后,提取的电成像孔洞特征相关参数。
3 实例应用
在Visual Studio 2010上实现上述算法,并挂接到极睿测井解释平台上。根据多组计算数据得出图像形状特征(周长、面积经过归一化处理),其与电成像解释模式及沉积相的对应关系如表1所示。
表1碳酸盐岩形状特征与电成像解释模式及沉积相的对应关系
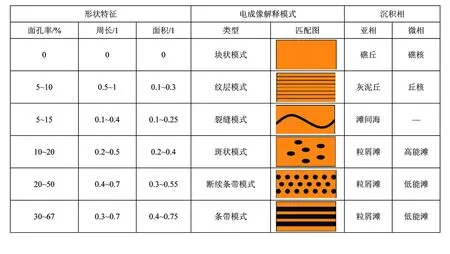

图4 某地区A井处理效果图
应用该算法对某地区A井进行了处理,结果见图4。处理深度为5427~5436m。5428.2~5431m井段为孔洞型Ⅰ类,匹配图为斑状模式。该模式为亮色背景上随机分布暗色斑点,斑点没有成层性。亮色背景说明地层电阻率较高,暗色斑点一般是粒间孔、溶孔或导电矿物等组分。该模式所指示的沉积环境为水动力条件较强的高能环境,沉积相为粒屑滩亚相高能滩微相。5431~5434m井段为缝洞型Ⅰ类,匹配图为条带模式。该模式为亮色背景上规则分布暗色水平条带,条带厚度较大,一般为水动力条件较弱的低能环境,沉积相为粒屑滩亚相低能滩微相。该方法处理结果与常规测井解释结果基本一致,并能自动、高效地判别出沉积模式和沉积环境。
4 结论
1)OTSU算法与分水岭算法结合的图像分割算法,能够有效压制图像中噪声的干扰,准确地从复杂背景中分离出电成像测井特征目标,清晰完整地提取出图像形状特征轮廓。
2)利用等价对特征标记算法,能准确提取电成像测井图像的形状特征;利用最小欧式距离判别法对提取形状特征进行处理,能够准确划分碳酸盐岩解释模式,并判别其沉积相及沉积环境。
