增程式电动汽车的智能体组网及推理技术
2019-03-31张泉泉牛礼民朱奋田朱华
张泉泉,牛礼民,朱奋田,朱华,孙 洒
(安徽工业大学机械工程学院,安徽马鞍山243032)
为解决传统汽车尾气排放对环境的污染及不可再生能源消耗等问题,开发更为有效的能量管理策略是混合动力汽车领域的研究热点。在满足动力性和经济性的条件下,增程式电动汽车能够实现零排放,可有效解决传统汽车尾气排放量大及电动汽车续航里程短等问题[1]。
目前,国内外学者对增程式电动汽车能量管理策略做了大量研究。Lee等[2]提出基于动态规划的混合动力电动汽车能量管理策略,根据行驶距离分析车辆在运行中的最优控制和电池状态,优化发动机和电机间能量分配,使车辆在到达目标点时电池电量被充分利用,燃油经济性得到改善;Baert等[3]根据动力学模型和整车实测数据,提出了一种基于模糊逻辑的实时能量管理策略(EMS),在未知的驾驶周期情况下,模糊逻辑控制器能够合理控制发动机启停和功率输出,整车能量实时控制得到了优化;吴晓刚等[4]考虑增程器在不同输出功率下燃油经济性,以最小燃油消耗和电能消耗作为目标函数,利用凸优化理论对增程式电动客车能量管理策略进行优化,并对两种不同运行方式下的优化结果进行对比,仿真结果表明整车能耗下降了3.56%。已有的研究表明,目前国内外学者对增程式电动汽车能量管理的研究主要集中在全局型能量管理、实时型能量优化及增程器性能优化等方面,对于增程器和动力电池间智能性协调能量分配的研究较少。鉴于此,基于JADE(Java agent development framework)平台对增程式电动汽车部分动力部件进行多智能体系统建模,利用局域网进行信息交互,优化增程器和动力电池间的能量分配,实现节能减排,延长续航里程。
1 MAS组网及推理功能的实现
1.1 智能体系统
智能体概念起源于对分布式人工智能的研究[5],随着计算机技术的发展,逐渐产生了多智能体系统(multi-agent system,MAS)。多智能体系统广泛应用于不同领域,在面对复杂的问题时,实现对任务的分解与分配。对于智能体而言,均具备自治性、反应性、能动性和社交性等性质[6],同时智能体间又存在相互协调、制约的关系。针对增程式电动汽车动力部件(如驱动电机、动力电池)在行驶中实现的功能,构建智能体基本结构,如图1 所示。图1 中:感知环节,实时接收动力部件状态;通讯环节,选择性地与MAS中其他Agent进行交互;信息状态库,将接收到的信息集合成自身状态数据库;先验知识,对Agent能量分配点进行保存,以便下次任务的查询;推理及执行环节,Agent 根据自身状态和交互信息,协调分配能量,发送相关执行命令。
在组网和推理技术中,Agent承担着信息的接收、处理及发送。考虑到JADE平台在语言开发环境方面的不足,将JADE相关jar文件添加到Eclipse路径下,利用Java语言编程度高等特点进行编程,开发智能体模型,集成智能体开发平台和编程软件。JADE通讯机制采用异步通讯方式,智能体间相互协调、协作,完成复杂问题的求解,实现MAS的组网及推理功能。
1.2 多智能体系统的建模
1.2.1 智能体接口
为避免集中式控制思想中由控制中心统一命令调度造成的信息拥堵和决策混乱等问题[7],文中采用完全分布式控制思想构建MAS,并添加智能体接口负责信息的转化与传递。Agent接收到接口的 信息后,通过交互完成能量分配。当接收到来自汽车总线的需求转矩Treq及车速vreq时,智能体接口(interface agent)将信息传递给驱动电机Agent,同时将信息转化为功率传递给发动机Agent和动力电池Agent。智能体接口信息如图2。
1.2.2 驱动电机Agent
驱动电机作为增程式电动汽车唯一驱动源,其响应速度和效率对整车动力性和能量利用率有着重要意义。在MAS 中,驱动电机Agent 负责信息的接收、处理和输出。驱动电机Agent 以数组的形式接收来自Interface Agent的Treq,vreq和电机控制单元的转矩、转速,然后对数据库进行查询。若相同,则返回给电机控制单元相应的转矩、转速;若不相同,则通过脉谱图进行输出,将结果保存在历史数据库中以便下次查询。驱动电机Agent交流界面如图3所示。
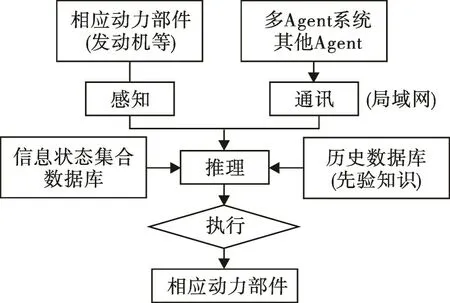
图1 智能体的基本结构Fig.1 Basic structure of agent
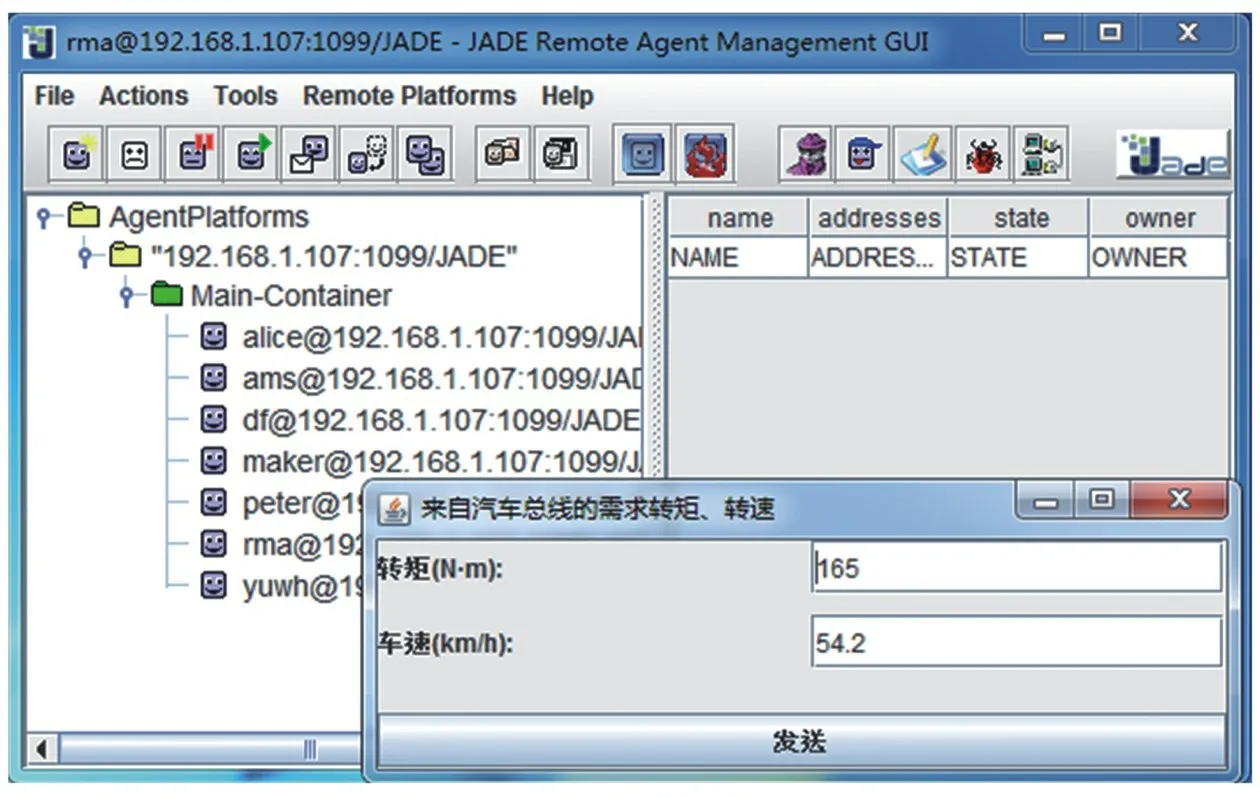
图2 智能体接口信息Fig.2 Information of agent interface
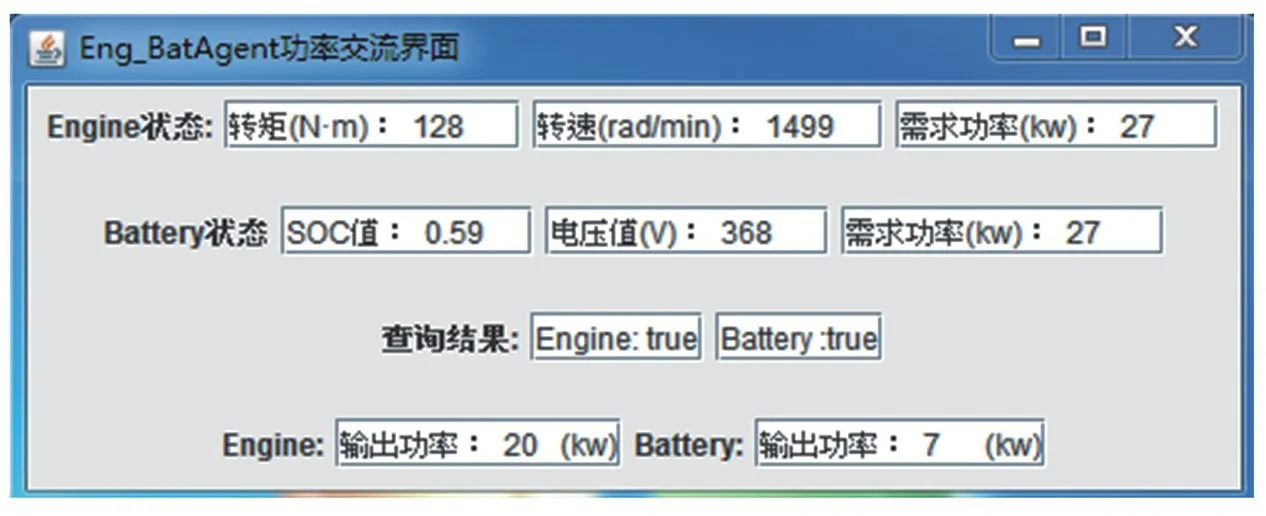
图3 驱动电机智能体的交流界面Fig.3 Communication interface of driving motor agent
1.2.3 发动机Agent和动力电池Agent
增程式电动汽车属于多能源混合动力汽车,需要制定整车能量管理策略合理分配能源间输出功率。当接收到Interface Agent的需求功率后,发动机Agent和动力电池Agent分别根据当前状态信息对自身历史状态数据库进行查询:若均相同,则将数据库中的输出功率值传递给发动机和动力电池控制器;若不相同,则进一步地优化推理(下章介绍),并将结果保存以便下次查询。发动机Agent和动力电池Agent交流界面如图4。
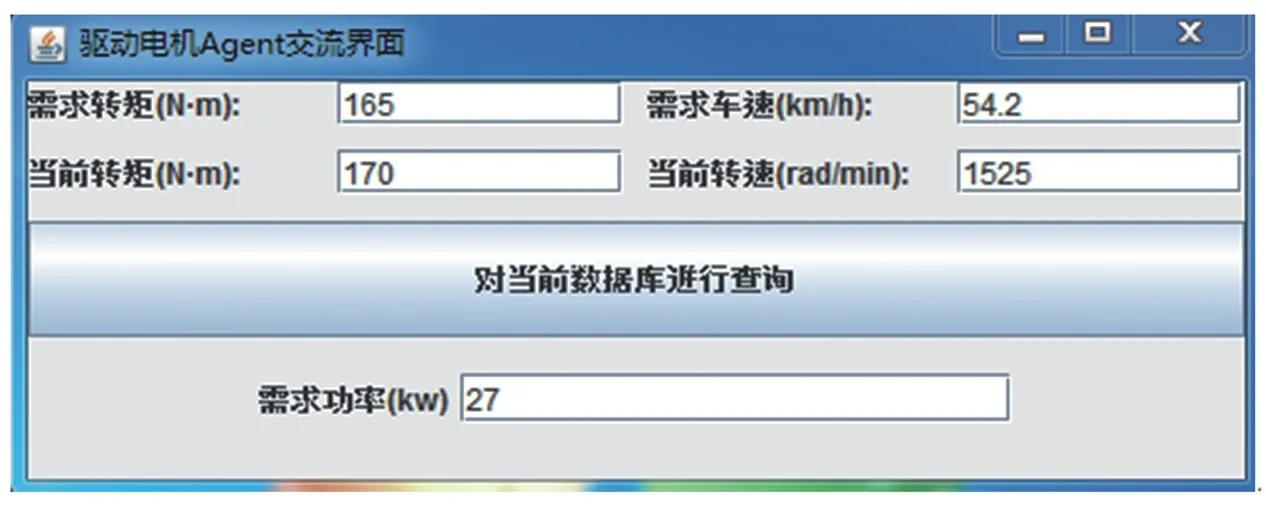
图4 Eng_Bat_Agent交流界面Fig.4 Communication interface of Eng_Bat_Agent
1.3 推理及能量控制管理
在完成智能体组网技术后,MAS通过查询自身历史数据库实现简单的推理功能。为满足在车辆行驶中不同工况和驾驶需求,需各智能体根据自身状态及交互信息,实现进一步推理和能量控制管理。
1.3.1 Agent推理过程
在接收到整车需求信息后,Agent通过局域网与其他Agent进行交互,通过查询数据库历史数据初步完成能量分配。表1~2分别为发动机Agent和动力电池Agent历史数据库部分数据。
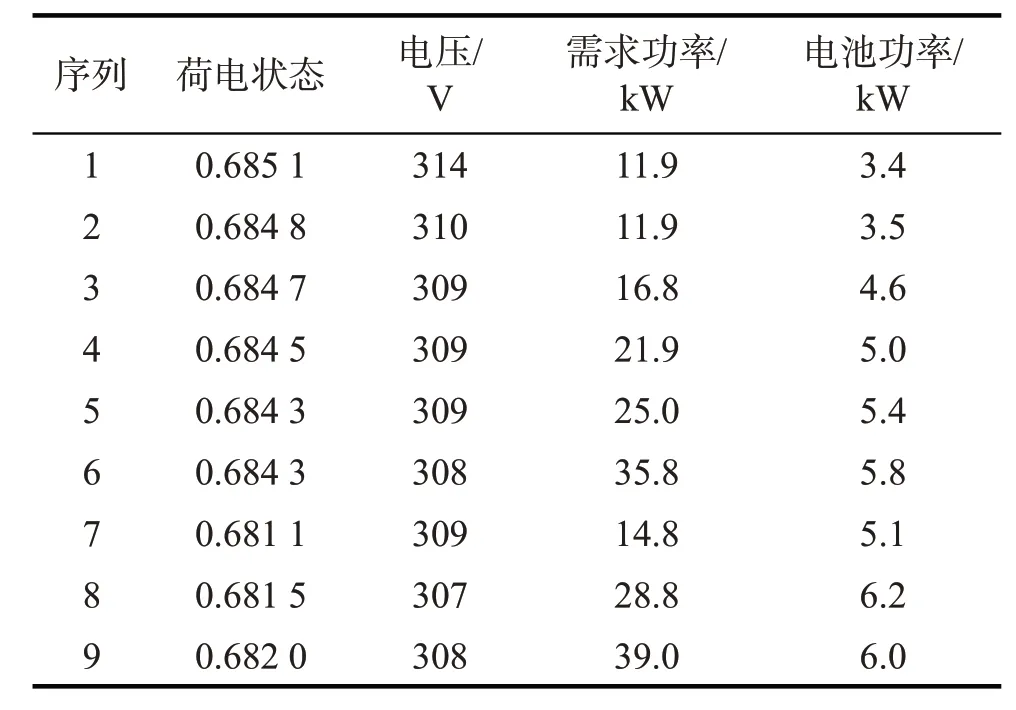
表1 动力电池智能体的历史数据库Tab.1 History database of power battery agent
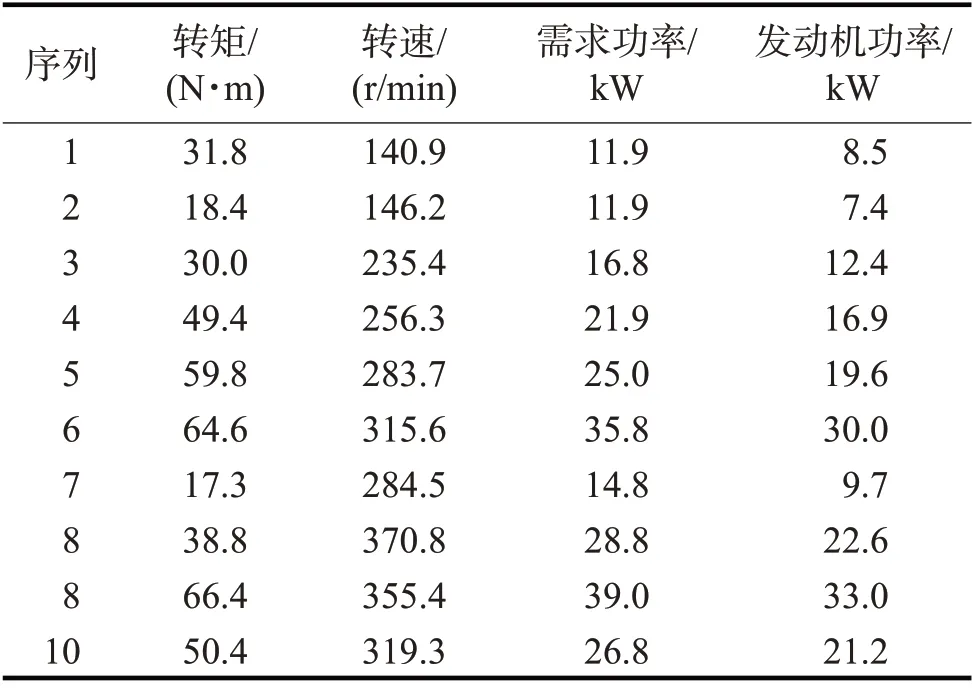
表2 发动机智能体的史数据库Tab.2 History database of engine agent
智能体根据当前状态进行推理,若当前状态与历史数据库中数据相匹配,则输出相应功率。例如,动力电池当前状态:荷电状态0.685 1;电压314 V;需求功率11.9 kW。发动机当前状态:转矩31.8 N·m;转速140.9 r/min;需求功率11.9 kW。MAS输出动力电池输出功率为3.4 kW,发动机输出功率为8.5 kW。
为进一步完善智能体组网的推理功能,发动机Agent 沿最优燃油消耗曲线输出转矩和转速,动力电池Agent根据输出结果进行对应调整,完成能量的合理分配。
if(Engine_Pcurr<Engine_Preq)&&(Engine_Preq<Pmax)
P=(Engine_Preq-Pmin);else if(Pmin<Engine_Preq)&&(Engine_Preq<Engine_Pcurr)
P=(Engine_Preq-Pmin);else
P=abs(Engine_Preq-Engine_Pcurr);end
//根据当前状态输出需求功率差值
Engine_kW=P:10:(Pmin+dP);//等值循环划分
String fuel="SELECT Engine_kW FROM fuel_rate";//查询不同功率下燃油消耗
min Engine_kW;//循环计算得出最小燃油下的功率
String Engine_rpm="SELECT Engine_rpm FROM Engine_kW";//查询对应功率下的发动机转速
print<<Engine_rpm;//发动机转速
//利用公式:Preq=Peng+Pess
print<<Pess;//动力电池输出功率
1.3.2 能量控制管理
控制策略是混合动力汽车控制系统的核心,优秀的控制策略能够合理优化增程器和动力电池间能量分配,使整车燃油经济性达到最优。目前关于混合动力汽车的控制策略主要有基于规则型控制策略[8-9]、基于优化型控制策略[10]及智能型控制策略[11]。文中基于MAS 推理过程,以动力电池的荷电状态(state of charge,SOC)为状态变量进行能量控制管理。当SOC处于高阈值时,由动力电池提供整车需求功率;当SOC值处于低阈值时,增程器开启,发电机带动发动机启动,为整车提供能量。其中增程器作为系统控制量,协调不同动力源间能量分配。主控制器模型如图5。
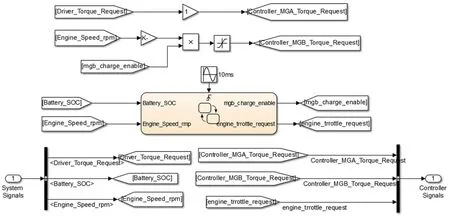
图5 主控制器模型Fig.5 Master controller model
2 模型与仿真
2.1 增程式电动汽车数学模型
图6 为增程式电动汽车基本结构,由增程器和动力电池为整车提供能量,汽车在行驶过程中整车功率平衡方程见式(1)。

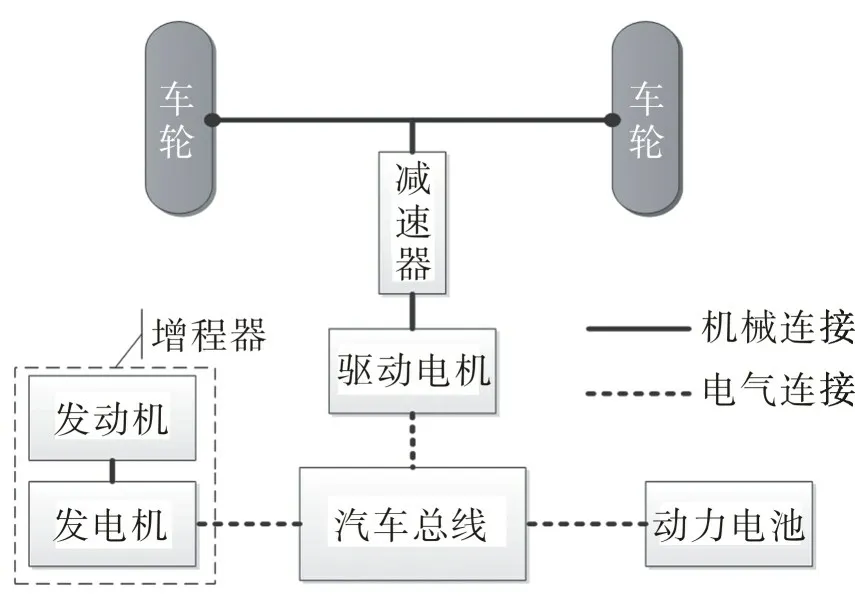
图6 增程式电动汽车结构简图Fig.6 Structural diagram of extended-range electric vehicle
其中:Preq为t 时刻整车需求功率;PAPU(t)为t 时刻增程器输出功率;Pess(t)为t 时刻动力电池充放电功率;Pm(t)为t 时刻驱动电机输出功率。
2.1.1 驱动电机数学模型
为减轻计算过程的复杂度,忽略驱动电机动态响应,以脉谱图查表形式作为驱动电机模型。式(2)为驱动电机输出功率,式(3)为驱动电机转矩范围,式(4)为驱动电机转速范围。

式中:Tm(t)为驱动电机转矩;ωm(t)为驱动电机转速。
2.1.2 增程器数学模型
对于增程器而言,发动机输出轴与发电机输入轴直接机械耦合,因此发动机和发电机具有相同的工作点[4]。文中将发电机效率看为恒定值,以此对增程器进行建模。
图7为发动机燃油消耗速率,其中实线表示发动机在不同节气门开度和转速下的最优燃油消耗速率曲线。当接收到Preq时,发动机Agent 计算节气门开度,通过脉谱图输出当前转速下发动机实际输出功率。式(5)为增程器输出功率,式(6)为发动机输出功率范围,式(7)为增程器消耗能量。

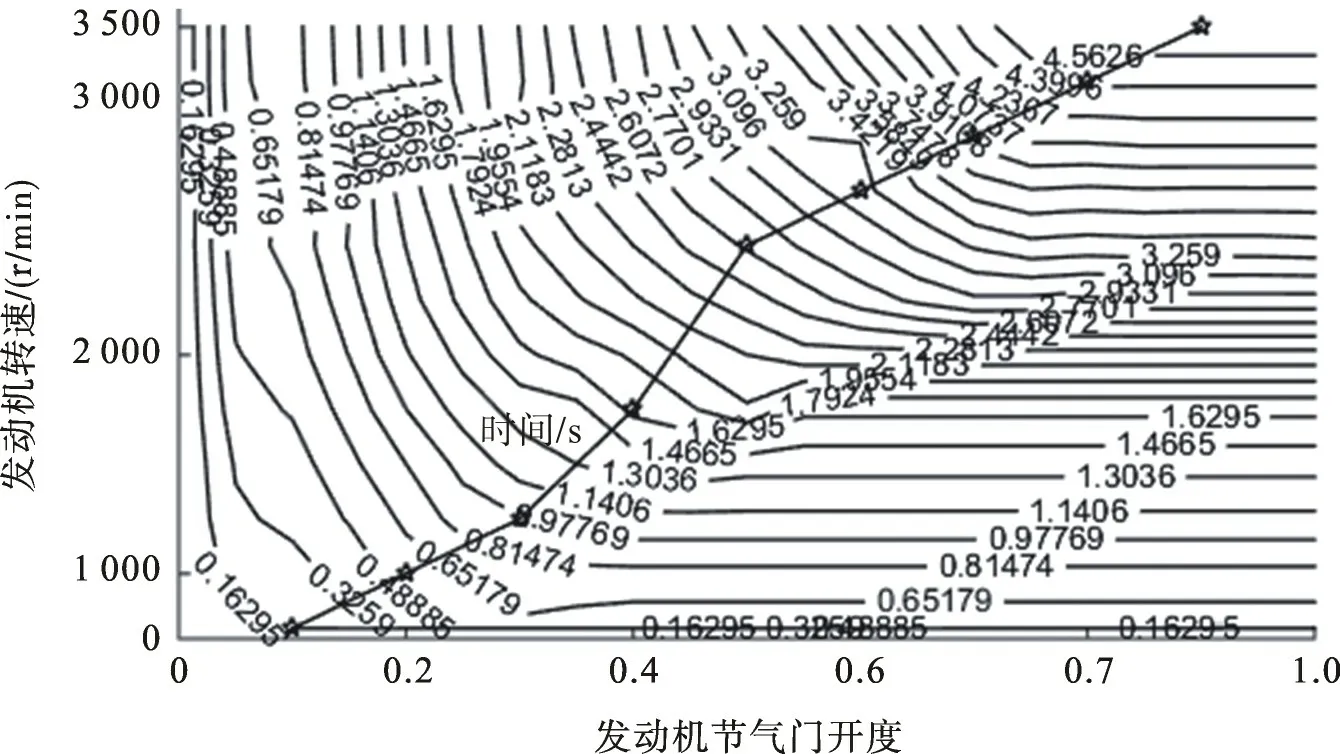
图7 发动机燃油消耗速率Fig.7 Fuel consumption rate of engine
式中:PAPU(t)为增程器的输出功率;Pf(t)为发动机输出功率;Pf_min(t)为发动机最小输出功率;Pf_max(t)为发动机最大输出功率;η1为发电机的效率。增程器工作效率见式(8)

式中:k 为发动机瞬时燃油消耗率;Qf为燃油低热值。
2.1.3 动力电池模型
不考虑电池电化学过程,文中将动力电池看成由理想的开路电压和1 个内阻串联组成的等效电路[12],如图8所示。电流表达式见式(9)

式中:Uoc(t)为动力电池的开路电压;Rint为动力电池的等效电阻;Pess(t)为动力电池的功率,正值表示放电,负值表示充电。
动力电池SOC值与电流I的关系见式(10)

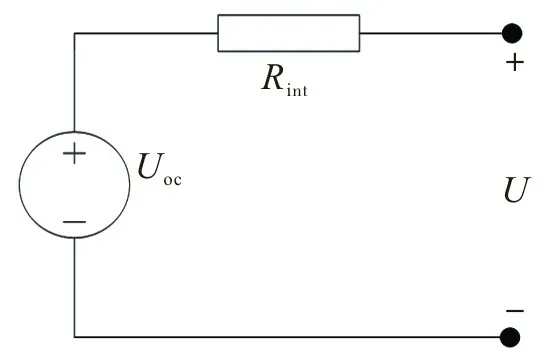
图8 动力电池等效电路Fig.8 Equivalent circuit of power battery
式中:SOC(t0)为动力电池t0时刻的荷电状态;C为动力电池的容量。
为验证推理及能量控制管理策略的可行性,文中参考文献[13]中的整车基本参数,在MATLAB/Simulink中建立整车动力学模型,如图9所示。
2.2 仿真结果分析
文中采用的路况FU505[14]为组合路况中的一段,是测力计用来检测零部件安全性及参数匹配性能的常用路况,以此来检验文中搭建部件模型参数和能量管理策略的合理性。仿真运行结果如图10~13。由图10可知,整车跟随车速与目标车速基本重合,车速跟随效果较好。由图11,12可知:当仿真至240 s时,发动机开启,对外输出功率;动力电池根据整车需求功率进行调整。如图13所示,恒温式控制策略SOC值下降至0.6时,发动机以恒定功率为整车提供能量,多余能量转化为电能对动力电池进行充电。为避免动力电池因频繁充电造成的能量损耗,文中控制SOC值在相对稳定的状态。当SOC值下降至0.6时,由增程器和动力电池共同提供整车需求功率。
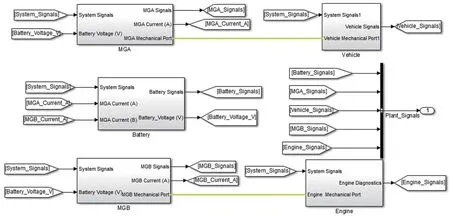
图9 整车动力学模型Fig.9 Dynamics model of vehicle
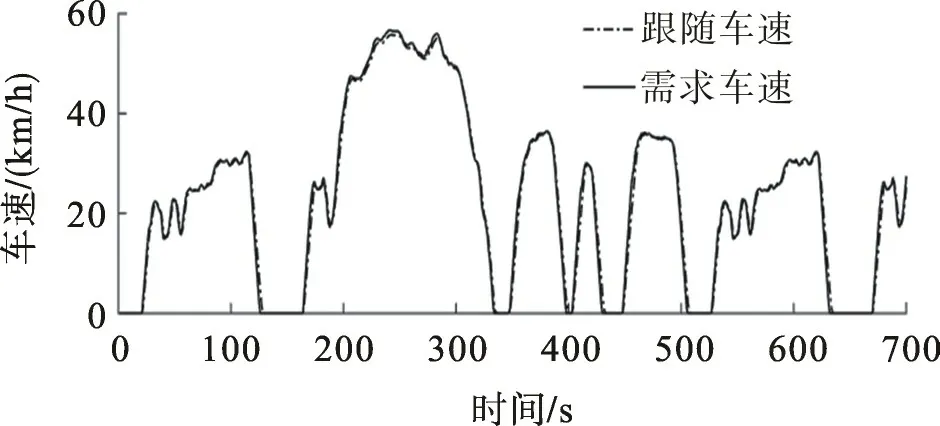
图10 车速跟随效果Fig.10 Follow effect of speed
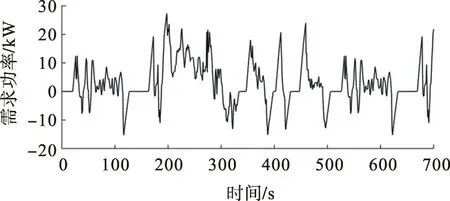
图11 整车需求功率Fig.11 Demand power of vehicle
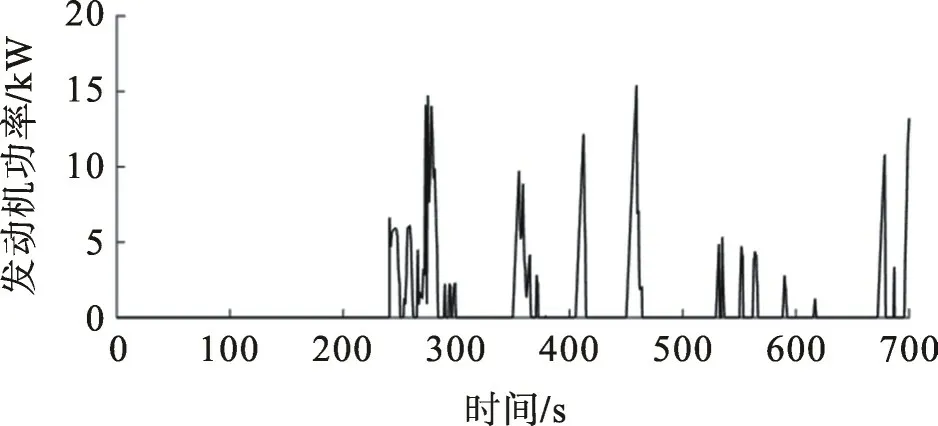
图12 发动机输出功率Fig.12 Output power of engine
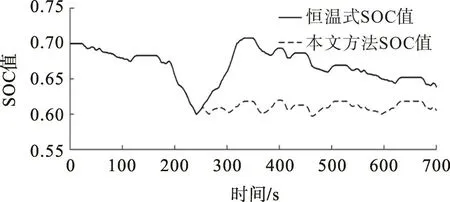
图13 不同控制方法的SOC变化曲线Fig.13 Change curves of SOC of different control methods
综上可知,本模型采用的能量管理策略能避免增程器对动力电池持续充电,减少在转化中造成的能量损失。表3为不同控制方法的能量消耗。由表3可看出:在相同行驶里程下,恒温式动力电池最终荷电状态0.64,本文控制方法为0.61,电能消耗基本相同,约为1 400 kJ;相较于恒温式控制方法,本模型控制方法发动机按照最优燃油消耗曲线对外输出,避免了发动机对动力电池持续充电造成的能量损失,燃油消耗下降3.15%,提升了整车燃油经济性。
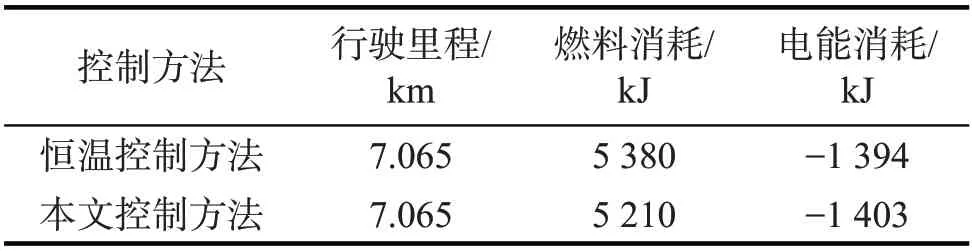
表3 不同控制方法的能量消耗Tab.3 Energy consumption of different control methods
3 结 论
以某增程式电动汽车为研究对象,提出一种基于多智能体组网技术的增程式电动汽车动力总成控制方法,在MATLAB/Simulink 中建立整车数学模型对其验证,所得结论如下:
1)基于JADE平台建立了增程式电动汽车动力部件多智能体系统模型,利用SQL Server建立相应数据库,各智能体根据自身状态及交互信息能够优化能量间分配,实现了智能体组网及推理功能;
2)在多智能体组网和能量管理策略的共同作用下,发动机沿着最优燃油消耗曲线输出功率,与恒温式控制方法相比,整车燃油消耗降低了3.15%。
