基于无人机的地铁保护区巡检系统研究
2019-03-31陈玉清柏文锋
陈玉清 柏文锋
(1. 广州地铁集团有限公司,广东广州 510010; 2. 广州地铁设计研究院股份有限公司,广东广州 510010)
为了确保运营地铁结构的安全,需沿地铁线路设置控制保护区,并对控制保护区内的外部风险源进行巡检,以便及时发现安全隐患[1]。 近年来,国内地铁行业发展较快,新运营里程不断增长,使得地铁保护区巡检工作量大幅增加。 目前,地铁保护区的巡检主要以人工巡视为主,人员投入大,作业效率低。 另外,地铁沿线的违规作业行为(如钻探等)具有即发性、不易发现等特点,给地铁结构安全保护工作带来困难。 面对当前地铁保护区日常巡检工作的技术瓶颈,有必要研究更加实用、高效的巡检方法。
近年来,无人机技术发展迅速,在各个行业的应用快速增长[2]。 而利用无人机的高空优势进行线路巡检也逐渐兴起,其应用主要集中在电力行业[3],同时在基站[4]、铁塔[5]、光缆[6]、高铁[7]及路桥[8]等检测中也有相关应用。 随着智能控制、机器视觉及模式识别等学科的交叉应用,无人机巡检技术正朝着自动化和智能化的方向发展。 该技术给地铁保护区的巡检工作也带来了机遇。 采用无人机平台搭载成像传感器,沿地铁线路进行影像拍摄,结合人工智能技术对地铁保护区的风险源进行自动识别,可大量减少巡检人员,统一质量标准,降低企业成本,提高工作效率,并可满足全天候的巡检要求[9]。
1 基于无人机的地铁保护区巡检系统
图1 展示了基于无人机的地铁保护区巡检主要流程。
1.1 无人机地铁保护区巡检硬件系统
(1)无人机选型
对于小区域的巡检任务及训练样本库的采集,可采用大疆M600 PRO 多旋翼无人机及配套的航摄系统。 多旋翼无人机一般由其所搭载的锂电池作为动力,具有携带方便、操作简单等优点,但其续航时间一般较短,不能满足大范围的巡检需求。 对于远距离的线路巡检任务,可采用成都纵横CW-007 复合翼无人机,该无人机采用固定翼加多旋翼的组合形式,可实现垂直起飞降落,解决了固定翼无人机起降对场地要求
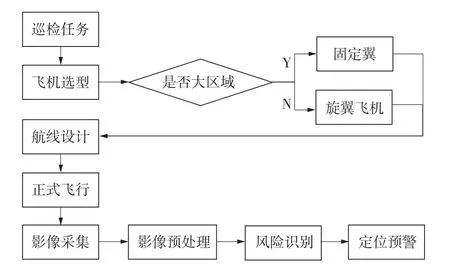
图1 基于无人机的地铁保护区巡检流程
较高的难题,同时又具有固定翼无人机续航时间长、飞行速度快、作业距离远等优点。 图2 展示了巡检时所选用的飞行平台,表1 展示了纵横CW-007 复合翼无人机的主要参数。

图2 用于地铁保护区巡检的无人机飞行平台

表1 纵横CW-007 无人机参数
(2)航摄仪选型
在采用纵横CW-007 复合翼无人机进行远距离线路巡检任务时,需要搭配合适的航摄仪,综合效果、重量及可靠性等因素,选用了索尼A7RII 相机及蔡司Loxia 50 mm f2 镜头(见图3)。 该相机配备35 mm 全画幅Exmor R CMOS 背照式影像传感器,有效像素约4 240 万,能够自动对焦,并支持连拍及4K 视频录制。镜头尺寸为66.2 mm,重量为320 g,焦距为50 mm,拍摄距离为0.45 m~+∞。 上述航拍设备的选择满足地铁保护区巡检任务的需求。

图3 配合纵横CW-007 复合翼无人机的航摄仪选型
(3)系统集成
对于远距离的线路巡检任务,选定无人机飞行平台和航摄仪之后,还需进行系统组装及控制软件的研发。 根据线路巡检任务的指标需求,在飞行平台和航摄仪的基础上选择各项模块、通信系统并进行硬件组装。 为确保无人机巡检硬件系统的飞行安全,需开发相应的地面控制软件。 在飞行过程中,地面控制软件在指导拍摄影像的同时,能够显示并存储飞行区域的电子地图、航迹、飞行高度、姿态、航向等参数,并可根据任务的需求对航线路径进行调整。另一方面,地面控制软件还可实时监控无人机系统各模块的工作状态,当出现异常情况(如模块损坏、电量不足、测控失效等)时,可按照预先设定的方案进行意外情况处理。
1.2 无人机地铁保护区巡检图像预处理
为确保能从无人机采集的影像中快速准确地识别并定位所关注的风险源,,需要对采集的图像数据进行预处理。 其主要的预处理步骤包括坐标转换[11]及影像畸变纠正[12]等。
(1)坐标转换
无人机携带的定位系统一般采用GPS 技术(WGS-84 坐标系统),而常规的地铁保护区图、地铁网线路图等设计成果的坐标通常属于城市地方坐标系统。 为便于风险源影像的定位以及专题地图制作,需要进行坐标系统的转换。 进行WGS-84 坐标系与地方坐标系的转换一般需要7 个转换参数(包括3 个平移参数、3 个旋转参数和1 个尺度参数)。 坐标转换一般采用布尔莎七参数模型,利用3 个及以上的已知公共点,通过最小二乘法平差计算得到坐标转换参数。
(2)畸变纠正
无人机所装备的索尼A7RII 相机为普通数码相机,其畸变差与用于航空摄影测量的量测相机有所不同。 数码相机的畸变参数一般有径向畸变、切向畸变和CCD 或CMOS 面阵内的变形参数等。 为求得相机畸变参数,需要利用一定数量的高精度控制点,建立包含相机畸变参数在内的共线方程,然后采用最小二乘法平差求解。
1.3 地铁保护区风险源自动识别方法
轨道交通保护控制区内的外部作业风险源包括搅拌桩、挖掘机、履带吊机、冲孔桩机、三轴搅拌桩机等作业设备。 为了在大量的无人机影像中自动识别包含上述风险源的影像,采用了机器学习的方法[13]。即首先构建样本数据库,将无人机影像样本数据库分为训练集和测试集,利用训练集中风险源的颜色、纹理、形状、空间等特征,建立外部作业风险源智能识别模型,并通过测试集对模型进行评估。 识别模型能够对影像进行分割、合并、要素提取以及统计分析等操作,实现包含风险源目标的影像自动识别,并根据影像的定位信息,通过坐标转换在电子地图上进行展示预警。
具体的机器学习方法采用的是人工神经网络算法[14]。 人工神经网络算法源于对人类大脑工作机理的研究,使用神经网络来模拟大脑运行过程,其逻辑架构一般分为输入层、隐藏层和输出层。 输入层用于接收数据,隐藏层的作用是对数据进行分解和处理,最终的结果将被整合到输出层。 每一层包含若干个处理单元,每个处理单元可认为是模拟了一个神经元。 若干个层构成一个网络,最终形成“神经网络”[15]。 例如识别影像中的搅拌桩,通过将搅拌桩分解为多个折线进入处理的下一层,每个神经元分别负责处理一条折线,每条折线被继续分解为两条直线,每条直线再被分解为为黑白两个面,一幅复杂的图像就变成了大量的细节进入神经元,通过神经元进行处理之后再整合,最后得出目标为搅拌桩的结论。
2 案例分析
结合项目实际需求,开展了某城市轨道交通保护控制区无人机飞行与巡检智能识别的试验。 首先整理了轨道交通保护控制区内的风险源清单(如表2 所示),具体任务即是通过无人机影像对清单内的风险源进行识别。 针对清单中的20 种风险源,利用大疆M600 PRO 多旋翼无人机采集了约850 张影像样本进行机器学习训练,建立自动识别模型。

表2 轨道交通保护控制区内风险源识别清单
通过机器学习建立了风险源自动识别模型之后,利用无人机沿某轨道交通线路进行影像采集,本次数据采集的各项航线设计参数如表3 所示。
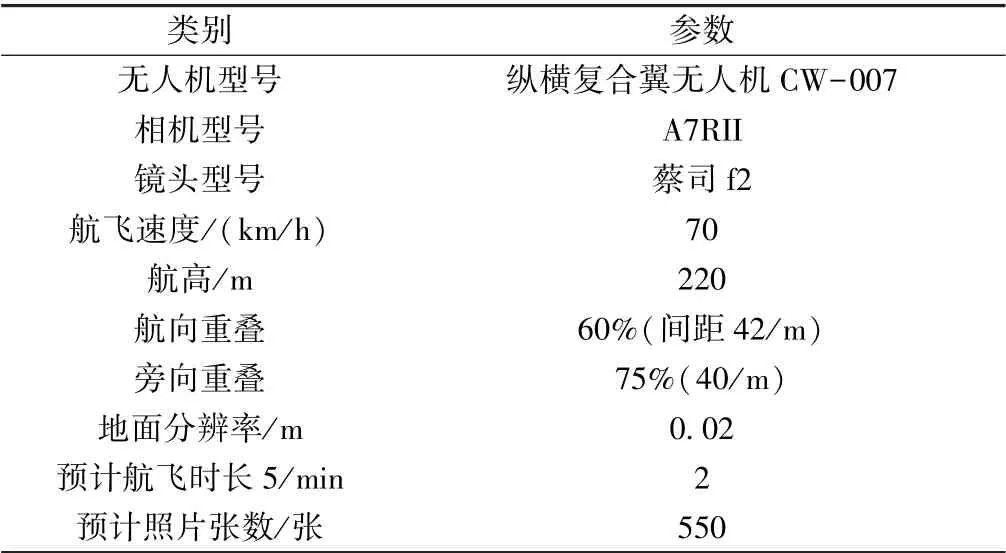
表3 航线设计参数
影像采集完成以后,经过必要的预处理,将影像输入到风险源自动识别模型之中,模型自动识别出36 个疑似风险源目标。 对疑似风险源目标进行技术判定,通过分析,其中有28 个风险源识别正确,8 个为误识别,另有遗漏风险源3 个,试验结果如表4 所示。

表4 试验结果
3 结论
测试案例结果表明,无人机巡检系统能根据要求进行影像数据的采集,所训练的识别模型能够自动识别出绝大部分的风险源目标,但识别算法和模型还存在有待完善的地方:(1) 当前模型训练样本数约850 张,采集样本数量不充分,需进一步提高训练样本数,完善识别模型程序;(2)识别结果仍然存在遗漏、错误识别和目标重复识别等问题,需进一步完善识别算法,提高识别率;(3)识别模型不稳定,需要改进程序算法,增加识别模型的稳定性。
