小型AUV动力定位建模与控制仿真
2019-03-30王俊雄
蔡 炜,王俊雄
(上海交通大学 船舶海洋工程国家重点实验室,上海 200240)
0 引 言
水下自主航行器(AUV)广泛应用于水下监测、侦察等工程作业,目前以军用为主,但小型、民用的AUV产品需求已逐渐在市场上升温。水下通信、路径规划、水动力性能分析等成为小型AUV产品设计实现亟需解决的难题。相对于大型深海作业的AUV,小型民用AUV体积质量小、航行速度慢、作业水深小、水环境多变,对水动力性能试验和动力定位控制的设计要求较高。
小型AUV的动力定位系统要求能够实时地根据当前的位置、姿态反馈信息发出控制信号,推进器执行信号产生抵抗风、浪等外界干扰力的作用力并推动AUV运行,从而在不施加外力控制的条件下,沿预先规划的路径轨迹实现AUV的定位航行。
AUV动力定位系统框图如图1所示。
1 AUV 数学模型建立
对于AUV动力定位控制系统而言,首要工作是建立水环境、AUV自身以及推进系统的数学模型。

图 1 AUV 动力定位系统框图Fig. 1 The diagram of AUV dynamic positioning system

图 2 AUV 固定坐标系和运动坐标系Fig. 2 Fixed coordinate and moving coordinate of AUV
由于小型民用AUV的作业水深小,姿态保持相对稳定,横倾和纵倾幅度很小,因此仅考虑三自由度(纵荡、横荡、首摇)的运动情况。以位置向量表示固定坐标系下AUV的位置及首向角,以速度向量表示运动坐标系下AUV的三自由度运动速度。
1.1 随机波浪模型
AUV在水下面临的作业环境属于不规则波浪环境,研究上经常把仅存在于主风方向且有无穷长波线、单向波峰彼此保持平行的二次不规则波称为不规则长峰波[2]。

常用的波谱密度函数有P-M谱、纽曼(Newman)谱、JONSWAP谱、ITTC双参数谱等。其中,ITTC双参数谱以有义波高和海浪特征周期T1为谱参量,具体表达式如下:

波浪力包括2部分:1)1阶波浪力引起的高频往复运动;2)2阶波浪力引起的慢漂运动,使AUV缓慢地漂离原来的位置。高频运动位置变化频繁,动力定位系统很难也没有必要对其进行控制,因为这样会大大加速推进系统的磨损和能量损耗。
规则波的2阶波浪力一般采用Daidola公式进行计算[3]:

式中:ρ为水密度;L为船长;χ为波向角,即航行方向与波浪方向的夹角;为波浪力计算系数。
波浪力系数的计算公式如下:

式中:λ为波长;k为波数。
沟通交流是集体备课的核心,也是其区别于个人备课方式的最大特征.集体备课可以实现集中备课组所有老师的智慧与成果,实现取长补短,共同提高.在主要发言人对整节课的教学环节进行设计之后,备课组长就可以组织所有老师开展交流,对方案的不足进行补充,比如新课导入的方式、重难点的突破路径、习题的设计与选择等.
整理得到不规则2阶随机波浪力的计算公式:

1.2 操纵运动数学模型
在图2所示的坐标系下,AUV三自由度低频运动学方程可表示为如下矩阵形式[4]:


均为水动力导数。
1.3 基于粒子群算法(PSO)的PID参数优化
20世纪70年代,Fossen提出非线性PID控制方法,实现了船舶自航控制。至今,PID控制以其算法成熟、结构简单、控制效果好等优点仍然成为工程项目控制系统的主要选择。
PID控制器以目标设定值与实际测量值的偏差作为输入量,将偏差值的比例(P)、积分(I)和微分(D)分量通过线性组合构成控制量,传递给执行机构,继而作用于控制对象。PID系统原理如图3所示。

图 3 PID 系统原理图Fig. 3 Schematic diagram of PID control system
AUV动力定位系统的PID控制算法如下:

PID参数的整定与优化是PID控制器设计实现的核心,随着智能控制理论的发展,出现了粒子群算法、遗传算法、神经网络算法等PID参数优化方法。
粒子群算法(PSO)是从鸟群觅食行为特性中获得启发并研究发明的一种数值优化算法。在PSO中,每个优化问题的潜在解都可以看成是搜索空间区域上的一个点,称之为粒子,每个粒子都有一个被目标函数所决定的适应值,依据全局和个体适应值的最优值,修正更新每个粒子的飞行速度和飞行方向,直至搜寻到空间区域内以目标函数为导向的最优解。

每次迭代过程中,依据粒子本身的位置速度信息和2个极值的大小对粒子的搜索速度和位置进行修正,具体更新公式如下:其中:w为惯性权重;c1为粒子跟踪自己最优值的权重系数,称之为“认知”,通常设置为2;w2为粒子跟踪全局最优值的权重系数,称之为“社会”,通常设置为2;表示[0,1]之间的随机数;r为约束因子,通常设置为1。
选用PSO算法对PID参数进行优化,用三维空间中的粒子表示PID的3个参数,以加快系统响应速度、减小超调为优化目标,选用误差绝对值的时间积分函数,即ITAE函数作为目标函数:

在三维空间域内搜寻使得ITAE函数获得最小值的粒子参数值,作为优化后的PID参数,并与常规PID控制方法进行仿真比对。
2 仿真结果与分析
以小型民用AUV产品为研究对象,主要参数如表1所示。基于ITTC双参数波浪谱和Daidola漂移力公式,在Matlab/Simulink中模拟AUV水环境,探究不施加作用力时,AUV的漂移运动情况。具体水况分布如表2所示。

表 1 AUV主参数Tab. 1 Principal parameters of AUV

表 2 水况分布Tab. 2 Water condition for calculation
在Simulink中搭建PSO优化模型,设置粒子规模为100,最大迭代步数为1 000,惯性权重从1.0随步数增长逐渐递减至0.1。优化后的PID参数如下:KP=
在Simulink中搭建基于PID控制器的动力定位控制系统,依据经验选取一组常规PID控制参数:KP=。给定AUV的初始位置向量和目标位置向量,2组控制器下的AUV运动仿真比对结果如图6~图9所示。

图 4 随机波浪波高时变曲线Fig. 4 Wave height time-varying curve of random waves

图 5 模拟波浪作用下的 X–Y 运动轨迹图Fig. 5 X–Y moving trace with the effect of simulated wave

图 6 PID 控制下的横向位移–时间变化曲线Fig. 6 Horizontal displacement curve with PID controller
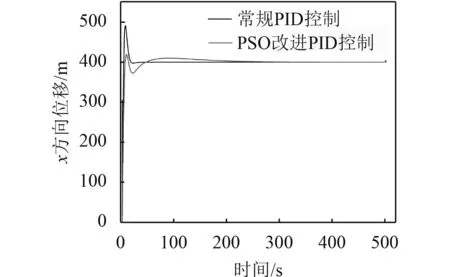
图 7 PID 控制下的纵向位移–时间变化曲线Fig. 7 Vertical displacement curve with PID controller
2组PID控制下,AUV均由定位原点抵达目标位置。常规PID控制下,系统经历约100 s的调整达到稳定,同时超调量达到约20%,控制效果较差;经PSO优化后的PID控制器,系统约40 s后快速达到目标位置状态附近进行微调,整体超调量约5%,控制性能较常规PID控制得到大幅优化。

图 8 PID 控制下的首向角–时间变化曲线Fig. 8 Heading angle curve with PID controller

图 9 PID 控制下的 X–Y 运动轨迹图Fig. 9 X–Y moving trace with PID controller
3 结 语
AUV在军用项目的成功推动了将其向小型民用产品方向推广的设想,用以实现例如湖底景色拍摄、水产养殖巡视、内陆河水文信息采集等诸多功能。小型AUV产品设计的核心问题有水动力性能分析、路径规划、水下通信等。本文基于不规则随机长峰波浪理论,模拟小型AUV作业的水环境,获取AUV的慢漂运动规律,并基于PID控制器搭建动力定位控制仿真系统,利用粒子群算法(PSO)优化PID参数,实现AUV的定位控制,获取了较好的控制性能。为AUV水动力性能试验及动力定位系统的软硬件设计创造了条件,为小型AUV产品的设计实现奠定基础。
