轮桨混合驱动两栖侦察车设计及轮桨分析
2019-03-28王常龙马新谋何自力
王常龙,马新谋,何自力,于 欢
(中北大学 机电工程学院, 太原 030051)
为了应对东海、南海岛礁争端,维护领土主权和权益,必须有相应的武器装备应对来自各方势力的挑战。所以研制了一种具有良好的行走适应性和水面通过性的轮桨混合驱动的两栖无人侦察车[1-2]。该轮桨混合驱动的两栖无人侦察车,前轮采用常规轮胎,后轮采用不同于前轮规格直径的三幅轮桨结构。在水中行进时,轮桨向后回转90°,起到螺旋桨的作用,在水中提供前进的动力,设计水中行进速度为0.5 m/s。在陆地上行进时最大行进速度为2.5 m/s。该轮桨混合驱动两栖无人侦查车自重26.2 kg,负载能力10 kg。
1 机构设计
轮桨混合驱动[3]的两栖无人侦察车,主要包括后轮桨的回转系统和驱动部分,前轮的驱动系统,和车首的类似船首的形状设计,还有部分动密封的结构设计。为实现轮桨的混合驱动,每个轮胎和轮桨分别采用独立的电机驱动。
设计目标,该轮桨混合驱动两栖无人侦察车具有较大的负载能力,前轮电机选型为MAXON DC 370354,轮桨驱动电机和回转电机选型为22ECS60 ULTRA EC,该两栖无人侦察车选用的电机直接与负载相连接,通过PWM脉宽控制技术控制电机转速,从而控制该无人侦察车的行进速度以及左右两侧转速差实现转向。由于诸多因素的考虑,该侦察车车体采用碳纤维框架结构,外加环氧树脂板蒙皮。其陆地上的蒙皮结构如图1所示。

图1 轮桨混合驱动两栖无人侦察车
图1两栖侦察车前端留有不完全封闭的开口,可以看到内部置有中央控制系统和配电器等自动控制系统,载体部分侦察装置配备有信号收发装置,便于远程遥控和适时收发战场信息。
该两栖无人侦察车由车架和两个前轮和两个轮桨组成,车架内装有电池、控制板、配电器、自毁装置。其蓄电池设计安放在蓄电池的导轨上,以便在第一次下水试验时调整整体的重心位置,保证该两栖无人侦察车的水中姿态。轮桨与驱动电机壳体直接相连接,驱动电机由回转电机驱动进行左右90°的回转,来切换陆地与水上的姿态。
轮桨回转系统[4]如图2所示,由三幅轮桨[5],驱动部分和回转驱动部分三部分组成。其中轮桨部分可以近似看成一个双桨船的结构,且该两栖无人侦察车需要一定的负载能力,即吃水深度达到该两栖无人侦察车的最大高度180 mm时,根据双桨船的螺旋桨直径的经验设计公式,其D=(0.6~0.7)TK,其中TK为满载时的吃水深度,D=126 mm,但是由于吃水深度远没有180 mm,所以轮桨直径定为120 mm。回转部分包括回转电机壳体、回转电机、密封套筒、电机支撑架、止推轴承。

图2 回转系统结构
回转系统有两个自由度,轮桨部分的扭矩为Q=KQρn2D5,查得近似形状的螺旋桨[6]敞水特性曲线得10KQ=0.25,则Q=25 mNm。回转关节M处的扭矩为M=15 N·m。理想状态下轮桨转速为8 rad/s,陆地上最高 理论速度为2.5 m/s。水中行进速度设置为0.5 m/s。该轮桨混合驱动两栖无人侦察车[7]结构参数见表1。

表1 轮桨混合驱动两栖无人侦察车结构参数
其中回转系统的回转范围为0°<α<90°。密封套筒所起到的密封作用是将电机支撑架和回转电机壳体所开的90°的缺口给密封起来,将面积较大的密封改为密封较为容易的旋转动密封。
2 推进系统设计
2.1 轮桨桨叶
推进系统的设计关键在于轮桨的结构设计,如图3所示,轮桨[8-9]的设计需要在原有螺旋桨的基础上合计一个轮桨幅板的结构,要考虑到幅板的角度,与螺旋桨叶稍的连接方式,幅板的厚度等因素。
出于轮桨结构要在地面有一定行走能力的使用要求,故将螺旋桨设计时的倾角θ设为0°,其余结构参数严格按照螺旋桨的设计要求进行设计。

图3 轮桨结构示意图
2.2 幅板角度
取轮桨跨越的垂直墙高为50 mm,并选取l=85.5 mm为轮桨越障的初始状态。该轮桨混合驱动的两栖无人侦察车后轮独特的轮桨结构,轮桨幅板的角度设为γ,为了在复杂地面的通过性,幅板的角度γ≥60°,并且两轮桨之间的相位角为60°。该两栖无人侦察车跨越垂直墙高主要有三种状态:初始状态、后初始状态、前初始状态。其具体信息参见表2。

表2 轮桨跨越垂直墙高信息表
前初始状态的后续状态是后初始状态,故只考虑初始状态和后初始状态。
图4为轮桨跨越垂直墙高初始状态,由图4可知轮桨由初始状态(黑实线)向前行进H,即转过角度β0=23.8°,到达临界状态,即:右轮桨与墙高相切,左轮桨也刚好相切,桨叶参考线到墙高的距离为h0,右轮桨转到两桨叶之间的空隙位置,由幅板起支撑作用,因而右轮桨在垂直方向上下降h1的距离。此时左轮桨桨叶参考线与墙高之间的夹角为γ/2,即是所求幅板角度γ的一半。测得γ=64°。满足γ≥60°的条件。

图4 轮桨跨越垂直墙高初始状态
轮桨处于后初始状态时,控制该两栖无人侦察车,继续向前行进H(即转过角度β0=23.8°),如图5所示。

图5 轮桨跨越垂直墙高后初始状态

由图5知,后临界状态越障时,整个两栖无人侦察车会有一定程度的右倾,为使该两栖无人侦察车越障后迅速调整姿态,各个轮桨和各个车轮分别由独立的电机驱动。
2.3 幅板厚度计算
将轮桨刚与地面接触的地方至与桨叶固定的地方,简化为力矩为H的直梁,其截面图如图6。

图6 简化直梁截面图
图6中b代表幅板宽度为40 mm,h为幅板厚度为目标值,dy为所取积分单元,即建立起在材料极限应力的允许的条件下,求取最小h的值,建立相应的数学模型。直梁所受的外力偶矩为Me=FN×H,
目标函数如下:
(1)
式中:σt·max为材料7075-T651的极限应力值;IZ为直梁的轴惯性矩;
直梁的轴惯性矩为:
(2)
由此数学模型得出幅板的最小厚度为0.939 mm,并且由0.939到5 mm之间取若干个值进行计算,所得出的幅板厚度与幅板所承受应力的关系如图7所示。

图7 幅板承受应力曲线
系铝合金作为一种塑性材料,其安全系数取值范围一半在1.5~2,由幅板所承受的应力曲线可以得出,幅板厚度应在1.1~1.4 mm,但是考虑到便于加工、水中阻力对其的影响,幅板厚度取值为2 mm,并对2 mm的幅板进行计算,得出幅板所受应力为101 MPa,安全系数为4.55。其最大转角为2.09′,最大挠度为1.21×10-2mm。
2.4 轮桨的挠度和转角计算
轮桨的幅板受力分析如图8所示。

图8 轮桨设计参数
轮桨弧形幅板所形成的角度为α,α所形成的角度为64°,β所形成的的角度为56°。α与β所形成的的角度没有均分,是因为轮桨在于前轮形成三角步态的过程中,防止控制过程出现问题,提高容错率,能更好的保持形式过程中的平稳性。
轮桨幅板与地面刚接触的时候,所受的力为FN,幅板与叶稍固定点的水平距离为H,垂直距离为D,幅板厚度为d,图中虚线代表取0.75R,此处螺距值约等于螺旋桨的平均螺距。
根据图8建立幅板的挠度和最大转角的方程
M(x)=-FN(H-x)
EIw″=-M(x)=FN(H-x)
(3)
其中:M(x)是弯矩方程;EIw″是微分方程;H与地面接触点到幅板固定点的距离;FN是地面给轮桨的支持力。根据式(4)得到最大挠度及转角:
(4)
式中:FN为幅板所受到的支撑力;H为受力点到固定端所受力矩;E为幅板材料的杨氏模量(7.5×1010);I为轴惯性矩,见式(2)。
2.5 轮桨越垂直墙高理论分析
该轮桨混合驱动的两栖无人侦察车的越障受力分析对该两栖无人侦察车的进行模拟仿真和实验是非常必要的,如图9所示。

图9 前轮越障受力分析
根据牛顿第三定律和力矩平衡原理,列出下列平衡方程:
(5)
式中:Fn为台阶位置给轮胎的支持力;f为滚动摩擦系数;ψ为附着系数;M电机额定转矩。

由于轮桨独特的结构,一般静力学平衡方程不能准确计算轮桨的跨越垂直墙高的能力,这里采用另一种分析方法,如图10所示,即轮桨的两个幅板的边缘都与垂直墙高刚好接触(接触点为m,n),在牵引力足够大的情况下,以n点为支撑点,跨越垂直墙高为hW。
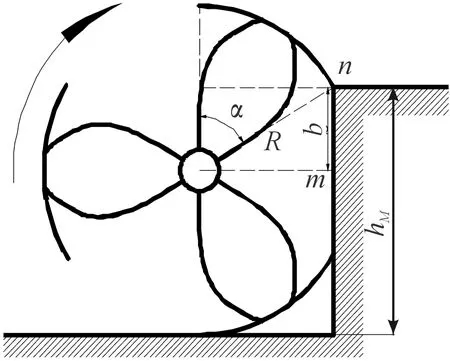
图10 轮桨跨越垂直墙高受力分析示意图
根据图10,可得:
hM=R(1+cosα)
(6)
图中若α的角度仅满足三角步态的要求,且控制轮桨转动过程中不会出现滑移现象,即α=60°时,轮桨理论上跨越垂直墙高的高度hM=90 mm。
考虑到工作环境的复杂性及多变性,且保证该两栖无人侦察车在工作过程中的稳定性,以及确保传输信号的质量,这里取BM=0.56hM。
3 轮桨敞水性能分析
根据以上计算结果调整轮桨三维模型,然后用Gambit软件画出轮桨的三维计算域网格。如图11所示。

图11 轮桨计算域及其轮桨三维网格划分
轮桨计算域的大小为直径300 mm×3 000 mm的圆柱形区域928 306个节点,2 974 125个网格单元。
在电机转速的允许条件下,应用Fluent软件对上如轮桨的类螺旋桨的桨叶和幅板进行了敞水性能[10]仿真计算,求得桨叶,幅板的表面压力、表面速度和推力等参数。
轮桨的桨叶和幅板表面的压力分布云图如图12所示。

图12 桨叶及幅板表面压力分布云图
由图可知,升力面(叶面推水的一面)与吸力面(相对于升力面的桨叶的另一面)交界的导边压力值比较大,导边到随边过程中,压力值逐渐减小。其中幅板侧面和幅板与桨叶连接处压力值最大。
图13是轮桨表面的速度分布云图: 根据伯努利方程,速度越大,压力越小;速度越小压力越大。图14是轮桨表面的速度等值线图,从图14可以看出,从叶根到叶稍,再到幅板,速度越来越大,桨毂到叶根的圆柱部分速度变化很小。图15是轮桨升力面、吸力面及幅板的流线型状及其在随边处汇合形成的泄出涡形状,图16是去掉幅板的轮桨的尾涡图,方便与图15进行比较。
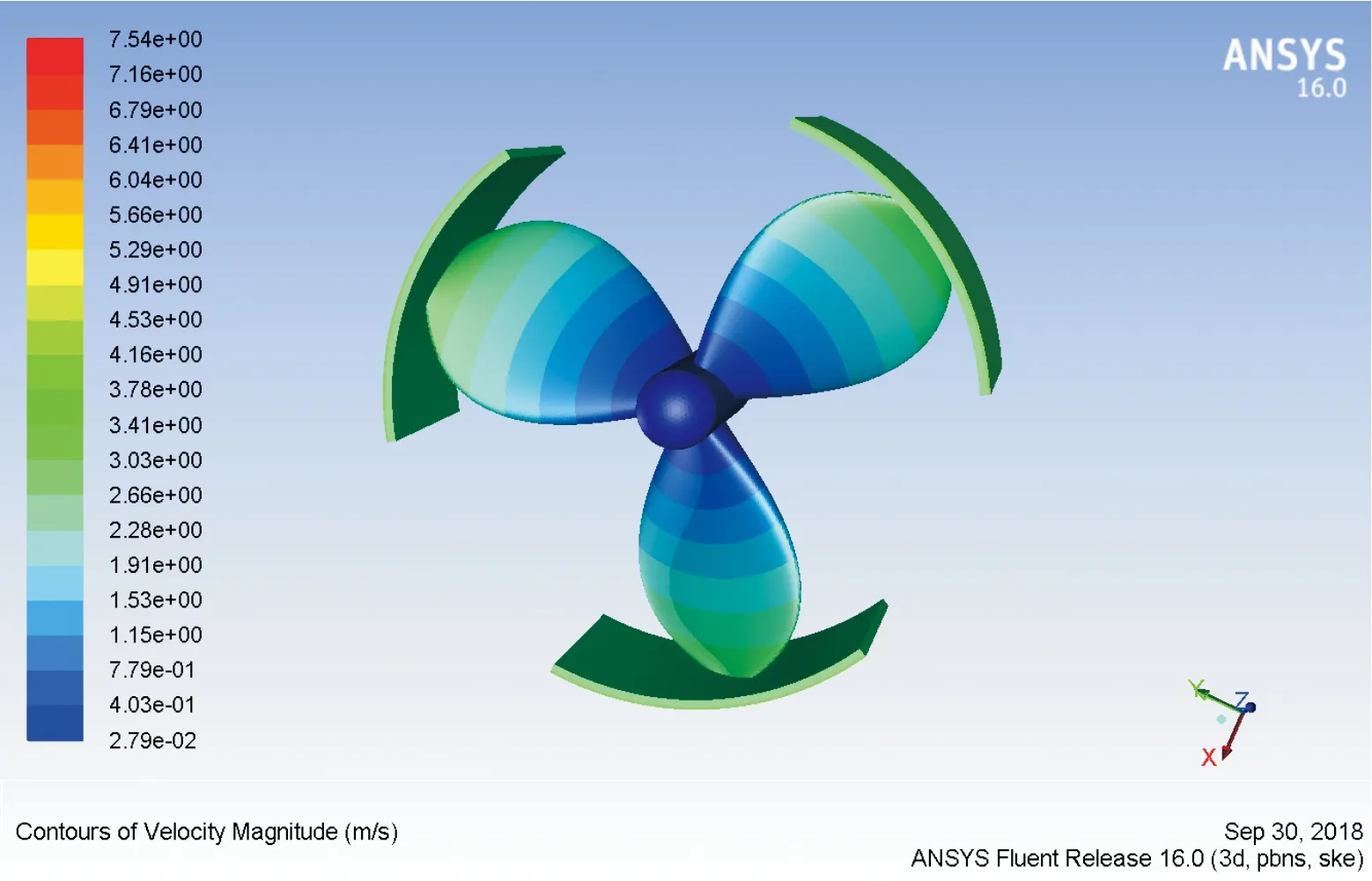
图14 轮桨速度等值线

图15 轮桨尾涡图

图16 去掉幅板的轮桨尾涡图
4 结论
1) 设计了一种轮桨混合驱动的两栖无人侦察车,其结构设计简单。
2) 执行侦察任务。并对轮桨的结构做了陆地上的强度理论分析,也利用FLuent软件对轮桨结构做了敞水性能分析,分析结果与理论经验公式分析的结果相吻合。
