粒子群优化的分块压缩感知影像融合
2019-03-22李现虎吕京国江珊
李现虎,吕京国,江珊
(北京建筑大学 测绘与城市空间信息学院,北京 102616)
0 引言
影像融合是都空间信息和光谱信息的优化处理,其可以获得同时包含有高空间分辨率和高光谱分辨率的影像,为各个领域提供具有更高针对性和准确性信息的研究影像[1]。根据影像融合特点可以将影像融合算法分为3个层次:像素级融合、决策级融合和特征级融合。其中像素级影像融合是目前最常用的影像融合方法,其获取的影像信息丰富、性能效果最佳、适用影像种类最广。本文研究也是基于像素级影像融合进行研究[2]。但由于其在影像融合过程中需要对影像的所有像素信息进行操作,所以随着遥感影像空间分辨率的增加,其数据量也越来越大,融合过程对于计算机性能的要求也在增加,所以影像融合时间和效果问题也越来越突出。
近年来发展起来的压缩感知(CS)理论提出,其可以在影像采样的同时对影像进行压缩,并且不会丢失影像的有用信息,达到完全重构原始影像的目的。Alin Achim[3]、 Atul Diveker[4]等一些学者结合压缩感知理论能够对影像压缩采样的特点,提出了基于压缩感知理论的影像融合算法,通过对影像压缩采样后的测量值进行融合减少了计算量,提高了影像融合效率[5],在一定程度上解决了大影像数据融合的问题。但由于影像中不同影像块具有不同的信息复杂度,如果采用统一的融合系数进行计算,无法在融合过程中对于每一块影像都达到较为理想的效果。针对该问题,Lu Gan[6]、杨森林[7]等人提出了分块压缩感知理论(BCS),通过分析影像的局部信息特征将影像分为不同的影像块,对具有不同信息复杂度的影像块采用不同的权值进行融合,提高了影像整体的融合效果。但该过程中,影像融合系数的选择不能随不同的影像自动调整,所以该算法不具有自适应性。
本文以分块压缩感知影像融合理论为基础,利用粒子群优化算法全局寻优的特点,提出基于粒子群优化算法的分块压缩感知影像融合算法。首先利用分块压缩感知理论对待融合影像进行分块压缩采样;然后通过粒子群优化算法对不同影像块的压缩测量值求取最优融合系数,并以该系数为权值进行加权融合,得到融合后的测量值;最后对融合后的测量值进行影像重构,得到融合影像。该算法在一定程度上解决了分块压缩感知影像融合过程融合系数不能自适应的问题。
1 相关理论
1.1 传统压缩感知理论
压缩感知理论最早是在2006年由Candes和Donoho提出的[8]。之后在现有的信号调和分析、时频分析、统计概率理论、矩阵分析、泛函分析、统计概率理论等理论的基础上得到了迅速发展[9]。压缩感知是一种新的在采样的同时实现压缩目的的理论框架,其压缩采样过程如图1所示。

图1 压缩感知理论框架
压缩感知从全局出发探究信号的本质结构,摆脱了信号频率等物理量度之间的联系[10]。只要信号具有某个可压缩的稀疏域,那么就可以利用与变换矩阵非相干的测量矩阵将变换系数线性投影为低维观测向量,从而把信号投影到低维空间。投影空间采样值中包含足够的信息来重构信号,使用稀疏最优化理论就能够精确地、高概率地从少量的采样值中重构原始信号。压缩感知理论主要包括信号的稀疏表示、测量矩阵的设计与重构算法3个部分,其优点就是针对可稀疏的信号,将传统的数据釆集与数据压缩合二为一,在获取信号同时对数据进行压缩,且大大降低了传统信号获取和处理流程中的潜在消耗。
1.2 分块压缩感知理论
然而,在实际影像压缩处理过程中,图像中不同位置的信息量即纹理信息往往不同,如果采用统一的采样率或统一的融合规则,往往达不到最为理想的效果。根据BCS 理论[6],一幅Ir×Ic大小的如下,划分为一个个B×B大小的小块,对其中每一块采用相同的测量矩阵φB进行CS 测量。
yi=φBxi
(1)
式中:yi为CS 测量值矩阵;xi为第i块图像经矢量化后的信号;φB为测量矩阵(φB∈RnB×B2);nB=Ir×Ic,为总像素数,n为要获得的压缩感知测量值的个数。 其是一个局部压缩采样,相当于对整幅图像采用具有如下的分块对角结构的测量矩阵进行全局压缩采样:
由于BCS 中只需要存储一个nB×B2的测量矩阵,而不是全局测量的n×N测量矩阵,因此,BCS 具有更高的存储效率。
另外,由于影像在不同分块中具有不同的信息复杂度特征,在加权影像融合中具有不同的最优融合系数,如果采用同一个融合系数对影像进行加权融合,则不能够使影像的不同信息复杂度位置得到最优的融合效果。本文采用分块压缩感知具有2个方面的优势:采用局部压缩采样的方法提高了存储效率;针对不同分块影像在融合中选用不同的最优融合系数,从而使影像不同部位都能得到最优的融合效果。
1.3 粒子群优化算法
粒子群优化算法PSO (particle swarm optimization)是一种进化计算方法(evolutionary computation)。 其基本思想是通过群体中个体之间的协作和信息共享来寻找最优解[11]。 在该算法中,鸟被抽象为没有体积和质量的点(粒子),并将其延伸到N维空间,粒子i在N维空间的位置矢量表示为Xi=(x1,x2,L,xN),飞行速度的矢量表示为Vi=(v1,v2,L,vN)。每个粒子都有一个由目标函数决定的适应值(fitness value),并知道其到已经发现的最好位置(pbest)和目前所在位置Xi。此过程可以看作粒子自身的飞行经验。另外,每个粒子还知道整个群体当前所发现的最好位置gbest(gbest是pbest中的最好值),此过程可以看作群体粒子的飞行经验。粒子通过自身与群体中同伴的最好的经验来决定下一步的运动方向与速度。在该过程中,粒子群优化算法(PSO)首先被初始化为一群随机粒子(随机解),然后通过迭代寻找最优解。在每一次的迭代中,粒子通过两个极值(pbest,gbest)来更新自己的位置与速度。
Vi=Vi+c1×rand()×(pbest-Xi)+
c2×rand()×(gbest-Xi)
(2)
Xi=Xi+Vi
(3)
式中:i=1,2,3L,N;N是此群中粒子的总数;Vi是粒子的速度;rand()是介于(0,1)之间的随机数;Xi是粒子的当前位置;c1和c2是学习因子,通常取值为c1=c2=2。
PSO 的算法流程如下:
(1)初始化一群粒子(粒子群规模为N),包括随机位置和速度;
(2)评价每个粒子的适应值;
(3)将每个粒子的当前适应值与经过的最好位置pbest作比较,如果其当前适应值较好,则将其当前适应值作为最好位置pbest;
(4)将每个粒子的当前适应值与群体粒子经过的最好位置gbest作比较,如果其当前适应值较好,则将其作为当前群体最好值gbest;
(5)根据公式(2)、公式(3) 调整粒子的位置和速度;
(6)判断是否达到结束条件,若达到则结束,否则转向步骤(2)。
迭代终止条件根据具体问题进行选择。一般选为最大迭代次数Gk,或粒子群目前为止寻找到的满足预定最小适应阈值的最优位置[12],粒子群优化算法流程如图2所示。

图2 粒子群优化算法流程图
2 基于粒子群优化的分块压缩感知影像融合算法
本文综合利用了分块压缩感知融合算法存储需求小、融合决策过程简单、有利于大数据量遥感影像融合[9]的优点,同时也应用了粒子群优化算法全局寻优的特点计算分块压缩感知融合过程中每块影像融合时的最优融合系数,提出了基于粒子群优化的分块压缩感知影像融合算法。此算法利用粒子群优化算法确定不同分块影像融合权重系数ω(其中ω为m×n矩阵,待融合影像分块维度为m×n),避免了传统经验值不能随不同影像的不同特点自适应调整的问题。该算法中采用粒子群优化算法选取融合参数ω(ω1,ω2,Lωm×n),在粒子群优化算法迭代过程中,将影像融合系数ωi(i=1,2,3,L,m×n)作为粒子,将信息熵和平均梯度函数作为优化目标函数,目标是使融合的测量值能够使信息熵和平均梯度值最大,从而得到限定优化目标函数之下的最优值。将该最优值作为目标融合权重系数,然后在分块压缩感知影像融合算法中采用加权融合规则进行影像融合。该算法具备一定的自适应性,从而保证了融合效果的最优化选择。基于粒子群优化的分块压缩感知影像融合算法流程如图3所示。

图3 基于粒子群优化的分块压缩感知影像融合算法流程图
具体影像融合步骤描述如下:
(1)原始影像预处理。将全色波段影像与多光谱影像进行空间配准,得到空间信息高度匹配的两幅影像,并根据具体研究区域进行拼接、裁剪等工作;
(2)分别对全色波段影像与多光谱影像进行分块;

(4)将图像测量值进行融合:y′=ωy1+(1-ω)y,ω∈(0,1);
(5)采用粒子群优化算法选取融合参数ω(ω1,ω2,Lωm×n)。在粒子群优化算法迭代过程中,将影像融合系数ωi(i=1,2,3,L,m×n)作为粒子,将信息熵和平均梯度函数作为优化目标函数,目标是使融合的测量值的信息熵和平均梯度值最大;
(6)将上述得到的新的压缩信息y′通过OMP(正交匹配追踪)算法进行压缩感知的影像重构,得到影像分别与对应的每块多光谱影像进行直方图匹配,得到最终的融合影像。
本文在影像分块的过程中采取了均匀分块的方法,但由于不同分块数对影像融合结果也会产生影响。所以实验先对分块压缩感知影像融合在不同分块数时进行了融合结果分析(图4),可以发现融合结果随分块数的增加,影像融合评价指标中AG、EN、PSNR、STD 都在增加,指标DD 在减小,表示融合效果越来越好。但随着分块数的增加,其指标变化越来越慢,当分块数为6×6时,AG、EN、PSNR 和STD 均达到最大值,且当分块数大于6×6时,上述各指标数开始有变小的趋势,DD 减小的幅度越来越小,并且影像融合时间急速增加。综合各种指标分析,可以发现在该实验中,当分块数为6×6时,影像融合效果最好。

注:各指标数值为多组实验结果的平均值,并且各组实验结果单独分析,与上述结果也较为相似。图4 BCS影像融合算法在不同分块时的融合结果评价分析
3 影像融合实验结果评价与分析
本文所用数据为512像素×512像素的WorldView影像(全色波段分辨率为0.5 m,多光谱波段分辨率为1.8 m)、512像素×512像素的高分2号影像(全色波段分辨率为0.81 m,多光谱波段分辨率为3.24 m)、512×512像素的Landsat-8影像(全色波段分辨率为15 m,多光谱波段分辨率为30 m),其中多光谱波段采用标准假彩色组合对上述算法进行试验验证,并与传统的IHS、PCA、CS、IHS-CS影像融合算法结果进行比较。不同算法融合结果如图5所示。
通过对图5实验数据中不同算法结果影像分析,可以发现各算法融合影像的空间分辨率均得到了明显改善,但不同算法的融合效果之间又有差异;另外,不同算法融合的影像在光谱保持方面也具有不同的效果。其中,CS 融合算法与本文影像融合算法在光谱保持方面效果较好,但在空间分辨率提升方面,CS 融合结果较本文算法融合结果较差,如图6(a4)、图6(b4) 黄色框图标出的部分,其纹理显示方面较图6(a3)、图6(b3) 明显更为清晰。另外,IHS变换在影像空间分辨率的提高方面也具有较好的优势,但其采用了替换融合的思想,所以导致其融合结果的光谱保持方面的效果较差,如图6(a2)、图6(b2) 与原始影像图6(a1)、图6(b1) 光谱的对比发现,IHS变换融合影像光谱较暗,而CS影像融合图6(a3)、图6(b3) 与本文影像融合算法的结果图6(a4)、图6(b4)与原始多光谱影像对比,其光谱效果视觉效果上变化不大。综合光谱特征的保持及空间分辨率的提升效果发现,本文算法具有较其他方法具有更大的优势,其融合效果改善较为明显。

图5 不同融合方法的结果图像注:第1、2组为WorldView影像;第3组为高分2号影像;第4组为Landsat-8影像。
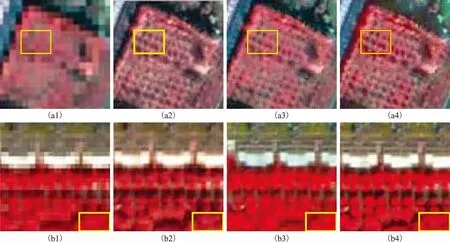
图6 不同融合方法的结果图像细节效果图注:(a1)、(b1) 原始多光谱影像;(a2)、(b2) IHS融合影像;(a3)、(b3) CS融合影像;(a4)、(b4) 本文方法融合影像。

算法AGENDDPSNRSTDTime/sPCA6.801 811.130 155.976 821.546 350.500 03.083 046IHS8.862 313.148 853.358 421.931 657.065 90.088 041CS6.239 612.580 233.601 020.751 957.410 80.006 999IHS-CS8.826 910.589 053.210 320.795 056.728 60.011 347本文算法9.371 113.827 744.344 325.035 057.770 40.009 711
表1给出了两组数据各种算法影像融合结果的平均梯度(average gradient,AG)、图像信息熵(entropy,EN)、光谱扭曲度(degree of distortion,DD)、峰值信噪比(peak signal to noise ratio,PSNR)、标准差(standard deviation,STD)的平均值。从表1实验数据中可以看出,本文算法的结果影像AG、EN、PSNR、STD值均为各算法结果影像的最大值,其指标参数为最优;DD值较CS算法结果较大,光谱扭曲度比CS算法稍差,但较其他几种算法结果值较小,其光谱扭曲度也比其他几种算法小,融合效果较好。而在计算的数据量方面,对比不同算法在影像融合算法运行时间发现,本文算法通过对采样后的少数测量值进行融合减少了影像融合过程的计算量,所以其运行所需时间比传统影像融合算法明显减少,但由于融合过程需要粒子群优化获取最优融合系数,所以其需要时间较CS影像融合算法稍微较多,但其影像融合结果比CS 算法要好。
4 结论
本文用粒子群优化算法对分块压缩感知影像融合算法进行改进。结果发现通过对采样后的少数测量值进行融合减少了影像融合过程的计算量,在基于粒子群优化算法的遥感影像融合中,通过将融合过程中的一系列融合权重系数ωi(i=1,2,3,…,m×n)作为粒子群,并在其中寻找最优值来确定分块压缩感知影像融合中最优的融合权重系数ωi(ω1,ω2,ω3…,ωm×n),弥补了传统经验值非自适应的缺点。另外也可以通过控制步长,使计算结果达到最优,从而在一定程度上平衡了融合影像空间分辨率的提高与光谱特征的保持能力,改善了影像融合效果。
5 结束语
本文基于分块粒子群优化的压缩感知影像融合算法在主观评价和客观指标上都表现出了较大优势,但在光谱扭曲度方面较CS影像融合效果略差。另外由于目前没有确定比较好的影像分块数方法,本文通过一系列实验分别分析了原始影像在分为不同行列数的实验结果,发现在分块数为6行6列时效果较好,而对于怎么更好地确定影像分块数将是下一步研究的地方。