基于DSP的一体化PGK控制系统设计
2019-03-19,,,,
,,, ,
(1.华中科技大学 电气与电子工程学院, 武汉 430723; 2.中国航天科技集团烽火机械, 成都 611130)
0 引言
精确制导组件(Precision Guidance Kit, PGK)是为导弹加装的制导控制系统,使导弹在飞行过程中,通过对导弹飞行轨迹的坐标数据与目标坐标数据的比较,计算预定落点和目标落点的差异,利用鸭式舵的旋转对导弹的飞行轨迹进行修正,大大提高导弹的精确打击能力,提升作战性能。
早年用于实现PGK的系统一般采用制导与控制分开设计[1-3],由多个子系统共同组成,各子系统分别通过定制软件和嵌入式硬件实现特定功能,然后利用不同的数据总线通信,如RS-422,1553B通讯总线等[4-5],实现协同作用。不过,这种基于多个子系统的PGK硬件和软件利用率低,可靠性低,且不同的子系统经常由不同的设备商提供,通用性差,维护成本高[6]。
为实现制导与控制系统的一体化,弹载计算机的应用被提出。弹载计算机常见的核心处理器有3种:PC机、单片机和DSP[7]。PC机接口能力差,需要较多的外围接口器件配合,体积大,不易实现小型化,而以Intel8031为核心的51系列单片机或96系列单片机组成的中央处理器功耗大,计算能力差,一般多用于简单的控制系统中[8]。本文采用具有计算精度高、响应速度快的DSP将制导、控制系统从功能和结构上分别实现一体化设计,从软件和硬件上分别进行资源统筹优化,将各子系统中的电子设备进行集成设计,减少系统冗余器件,降低成本,提高系统的可靠性。
1 方案设计
本系统采用高性能的DSP处理器作为控制模块的核心器件,从硬件结构和软件功能上分别进行一体化设计,实现高精确度、高可靠性、低维护的PGK系统设计目标。
PGK系统主要由飞行控制系统和地面系统组成,其中飞行控制系统主要包括弹载控制器、地磁测量模块、卫星导航模块以及数据记录模块,用于弹体在飞行过程中实现检测并调整飞行轨迹,是系统的主要构成部分。地面系统由无线装定器和测试系统组成,用于对飞行参数进行无线装定和系统测试。系统组成及关系如图1所示。

图1 PGK系统组成及关系图
2 硬件系统设计
如图2所示,方框内为PGK组件控制系统,方框外的无线装定设备和测发控设备为PGK组件测试配套设备。
硬件部分主要对控制模块、GPS接收机、地磁模块和无线装定模块的设计进行详细说明。

图2 PGK基本连接关系图
2.1 控制模块
PGK的控制模块是整个电气系统的控制核心,主要负责完成各种电气接口的初始化、系统配置、数据读取、数据处理、数据解算、控制算法运行、驱动波形输出等工作。
DSP相对于其他处理器来说具有哈佛结构、流水线操作、高速硬件乘法器的特点[9],拥有强大的实时数字信号处理能力,可以大大提高数据处理的实时性和运算速度,也因而适用于制导与控制一体化的系统。
为了实现接口与运算的分离,基于SoC高速浮点DSP芯片OMAP-137作为系统的计算核心,其主要性能指标如下:
1)500 MHz的主频,2800MIPS,2100MFLOPS。
2)256 kByte片上RAM,32 kCache,384 kByte片上ROM。
3)丰富的外设资源,2个SPI,1个I2C,1个TTL电平串口等。
4)32 bit的EMIF,133 MHz,可快速完成和FPGA的数据交互。
5)17 mm x 17 mm 256 pinBGA封装。
以DSP为核心的控制模块,与地磁模块、无线装定模块、卫星导航模块、电机驱动模块等连接,形成了制导与控制相统一的一体化系统。
2.2 GPS接收机
GPS接收机跟踪4颗以上卫星,测量接收机和卫星之间的伪距,然后通过综合解算得出接收机的速度和位置,实现对弹体的速度和位置信息的采集。
GPS接收机从功能上划分为有源天线(环形天线)、射频模块、数字处理模块、电源模块四部分。有源天线包含低噪声放大器,射频模块、数字处理模块、电源模块集成在一块OEM板上。卫星接收装置功能框图如图3所示。

图3 卫星接收转置功能图
2.2.1 射频模块
射频模块采用高集成度的一次变频方案,具有外围器件少、集成度高、体积小、功耗低等优点。模块通过下变频将射频信号变换成基带信号,经A/D采样后送给数字处理模块处理。
射频模块功能框图如图4所示,主要包括放大器、混频器、频率综合器(本振)、基带滤波器和A/D变换等功能单元。
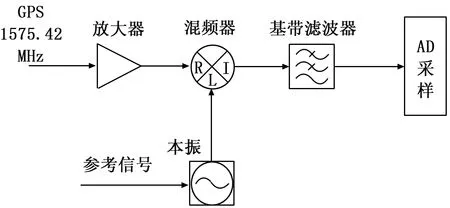
图4 射频模块功能框图
2.2.2 数字处理模块
数字处理模块用于跟踪接收卫星,提取伪距、伪距变化率、星历等参数,并进行导航解算,通过数据接口给出高精度的定位数据,为组合导航信息融合提供观测量。
数字处理模块采用超大规模FPGA+DSP架构,包含环路处理、主控及导航解算、对外接口和AGC控制等功能单元,如图5所示。
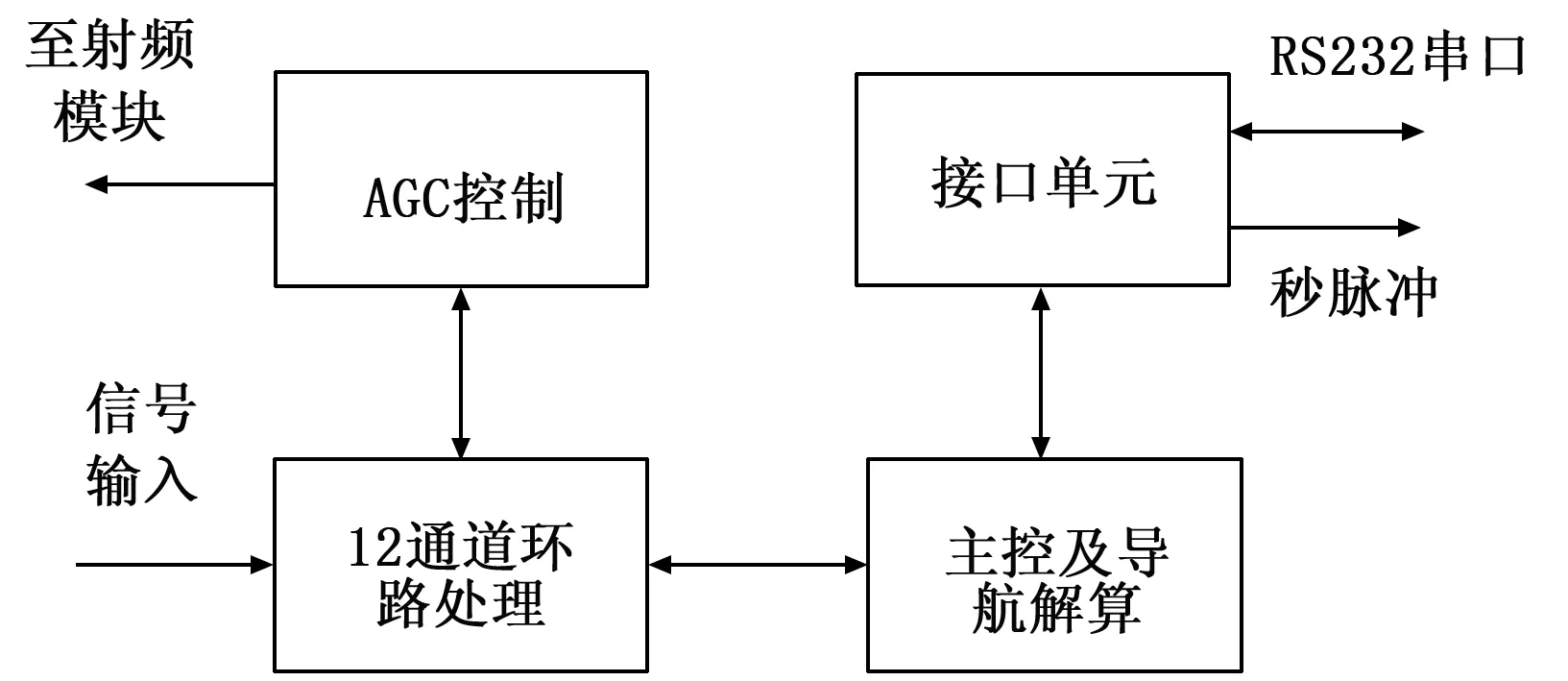
图5 数字处理模块功能框图
环路处理单元完成信号解调、伪距、伪距变化率测量等功能后,将数据输出到主控及导航解算单元进行导航解算,完成导航解算、接收机控制等功能。主控及导航处理单元包含高速数字信号处理器DSP、可擦除存储器FLASH、SRAM以及看门狗等部分,主要完成各个模块的控制和协调、伪距修正、定位解算等功能,最后通过对外接口输出,接口单元采用TTL秒脉冲信号输出,含两个全双工RS-232串行接口。
2.3 地磁模块
地磁探测定姿技术用于制导武器已成为研究热点,位于弹体上的地磁传感器在弹体飞行的过程中通过测量地磁场在各方向分量上的变化来确定弹体姿态,其采用独立电源供电,为地磁传感器提供低噪供电电压和工作所需的置复位信号,并对地磁传感器的输出信号进行降噪滤波,同时采用高精度AD采集芯片采集变换,为采集变换提供高精度参考电压。
选定Honeywell公司的HMC105X系列地磁传感器作为系统的地磁测量单元,主要性能指标如下:
1) 测量范围±6 Gauss(最大),分辨率120u Gauss;
2) 灵敏度5 mv/ Gauss(5 V电桥电压);
3) 非线性:0.5%(±3 Gauss);
2.4 无线装定模块
为了提高使用的安全性和方便性,在作战过程中,不允许存在线缆与弹体相连,因而,导弹上的飞行参数必须通过无线的方式在弹体未上电的情况下进行参数装定。
无线装定模块采用M24SR64-Y芯片,RF协议符合ISO/IEC 14443 Type A和NFC Forum Type 4 Tag标准。由于芯片工作无线电频率为13.56 MHz,通信距离较短,一般需要发射天线靠近装定。
3 软件系统设计
飞行控制软件用于控制炮弹在飞行过程中按照设定的飞行时序,根据GPS和地磁数据进行修正,以提高炮弹的射击精度。
飞行控制软件按功能可划分为监控、飞控、测试、装定4个功能模块。
3.1 软件工作流程
如图6所示,核心控制板上电后,首先运行飞控软件的监控模块,完成中断、定时器及各硬件接口的初始化设置,然后读取FLASH中的“起飞及测试状态”数据,采用“3取2”判断,如果控制字表示的是“起飞状态”,监控模块调用飞控模块,通过弹地通讯口发出1次“起飞状态”数据,并在指定的FLSAH“软件运行状态”地址单元中写入起飞状态的控制字,然后进行相关飞行控制;如果控制字表示的是“测试状态”,监控模块调用测试模块,在指定的FLSAH“软件运行状态”地址单元中写入控制字,完成相应项目测试;如果既不是“起飞状态”也不是“测试状态”,监控模块通过弹地通讯口发出1次“起飞及测试状态错误”数据,并在指定的FLSAH“软件运行状态”地址单元中写入相应的控制字。
起飞状态以及各测试项目对应的指令控制字如表1所示。
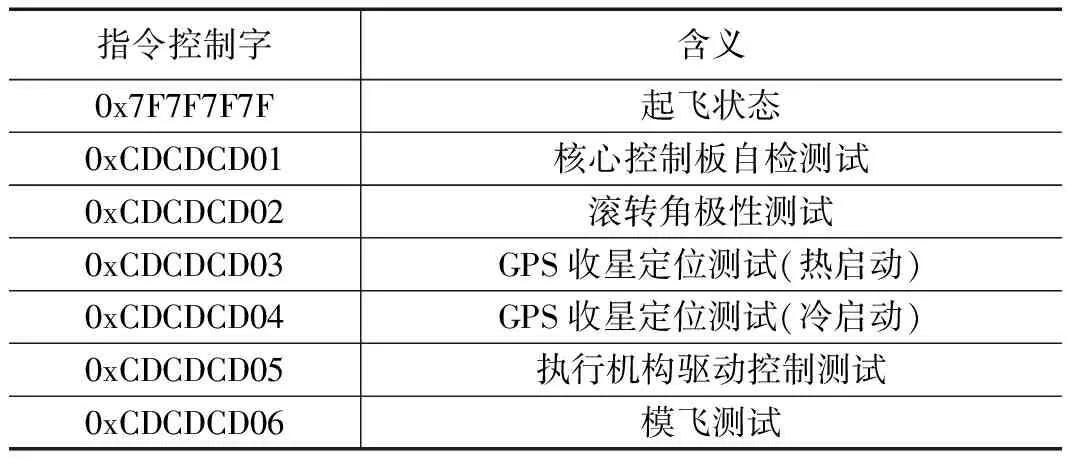
表1 指令控制字及含义对照

图6 飞控软件工作流程图
3.2 模块功能
1)监控功能模块。
(1)中断初始化:完成中断控制相关寄存器设置。
(2)定时器初始化:完成定时器控制相关寄存器设置,定时时间为0.002 s。
(3)硬件接口初始化:完成相关硬件接口的初始化;完成与GPS接收机通讯的RS232口的初始化,通讯协议为:波特率115200 bps,1位起始位,8位数据位,无校验位,1位停止位;完成与地面测试设备通讯的1路RS422口的初始化,通讯协议为:波特率460800 bps,1位起始位,8位数据位,无校验位,1位停止位。
(4)调用其他模块:根据FLASH中的“起飞及测试状态”数据,来调用飞控模块或测试模块。
2)飞控功能模块。
(1)飞控计算所需数据初始化:在进行飞控计算前,完成对飞控算法中使用数据的初始化,数据分为装定数据和写在程序中的常量。
(2)滚转角、滚转角速率解算:采集地磁传感器信号,进行相关补偿后,实时解算输出滚转角、滚转角速率,解算输出频率为500 Hz。
(3) 接收GPS导航数据:通过RS232口接收GPS接收机发出的导航数据,经校验后,提取出PDOP值、收星数、X向位置、Y向位置、Z向位置、X向速度、Y向速度、Z向速度,供控制规律计算使用。
3)测试功能模块。
(1) 核心控制板自检测试:调用自检信息获取函数,检查地磁传感器、存储器、通讯口、GPS接收机是否正常,将自检结果数据写入FLASH指定地址单元,同时通过弹地口将自检结果发送给地面测试装备。
(2) 滚转角极性测试:进入滚转角极性测试后,连续三次发出地磁传感器置位/复位指令,然后进行地磁传感器在线补偿,每隔2 ms计算滚转角和滚转角的速度,并同地磁Y轴和Z轴原始数据写入FLASH指定地址单元,通过弹地口将测试数据发送至地面测试装备。
(3) GPS收星定位测试:热启动测试过程首先从FLASH读取校验正确的星历数据,然后转发给GPS接收机,直至收到GPS接收机发出“星历装定正确”的反馈数据,然后发出GPS收星定位指令,直至收到GPS接收机输出的导航数据,将其写入FLASH指定地址单元,通过弹地口将测试数据发送至地面测试装备;冷启动过程则直接向GPS接收机发出收星定位指令,将输出的导航数据发送至地面测试装备。星历数据和收星定位指令最多发送3次。
(4) 执行机构驱动控制测试:进入执行机构驱动控制测试后,连续三次发出地磁传感器置位/复位指令,然后进行地磁传感器在线补偿,每隔2 ms计算滚转角和滚转角的速度,20 s开始驱动控制固定鸭舵停留在设定滚转角指令附近(在0°~360°范围内,每隔10 s增加45°,调用驱动控制函数和驱动使能函数),将相关数据写入FLASH指定地址单元,同时通过弹地口将相关数据发送给地面测试设备。
(5) 模飞测试:调用飞控模块,每隔100 ms从FLASH中读取模拟GPS数据,每隔2 ms读取模拟滚转角、滚转角速度数据,进行飞行控制运算,驱动执行机构动作,相关控制字写入FLASH。
4) 时序控制。
(1) 进入飞控模块,立即从弹地口发出1次“起飞状态”数据,并在指定的FLSAH“软件运行状态”地址单元中写入起飞状态的控制字;
(2) 将FLASH中的星历数据转发到GPS接收机,先从FLASH读取校验正确的星历数据,向GPS接收机发送星历装定指令,然后通过RS232口转发星历数据给GPS接收机,如果200 ms内没有收到GPS接收机发出的“星历装定正确”反馈数据,则重新发送星历装定指令,转发星历数据,最多进行3次星历装定,间隔时间200 ms;
(3) 连续三次发出地磁传感器置/复位指令(间隔10 ms),开始地磁在线标定补偿(周期1 s),计算地磁补偿参数,滚转角、滚转角速率计算(周期2 ms);
(4) 当飞行时间大于tg0(装定值)时,向GPS接收机发出GPS收星定位指令,如果在300 ms内没有收到GPS接收机发出的正确的导航数据,则重新发出GPS收星定位指令,最多发出3次GPS收星定位指令;
(5) 当飞行时间大于tk0-2(tk0为装定的修正开始时间),停止地磁在线标定,随后使用上一次的地磁标定补偿参数进行滚转角、滚转角速率计算(周期2 ms);
(6) 当飞行时间大于tk0(装定值),弹道修正开始,按照飞行控制规律形成控制指令,并按需控制执行机构驱动单元使能开启或关断,控制执行机构运动;
(7) 当飞行时间大于tk1(装定值),弹道修正结束,执行机构驱动单元使能关断。
3.3 地面测试系统
地面测试系统完成控制系统相关的参数装定和系统测试,主要由地面测试仪、无线装定设备、控制器外置模块及配套线缆构成,组成图如图7所示。
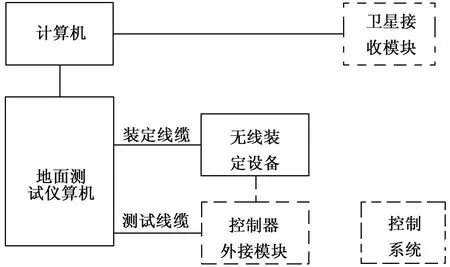
图7 地面测试系统设备组成
地面测试仪内置两路直流稳压电源,能在计算机指令分别独立控制下对外输出15 V±3 V的直流电源供电,最大输出电流分别为2A和5A,电源具备短路保护功能,测试仪对输出电压电流值提供显示功能,地面测试仪可以提供一路5 V的无线装定天线连接用电,提供一路USB设备接口与计算机主机连接通信,接收主机控制指令完成指定各项操作,提供二路RS422通信对外接口,一路用于与弹上通信,提供弹地有线通信、测试功能,一路用于与无线装定天线连接通信。地面测试流程如图8所示。
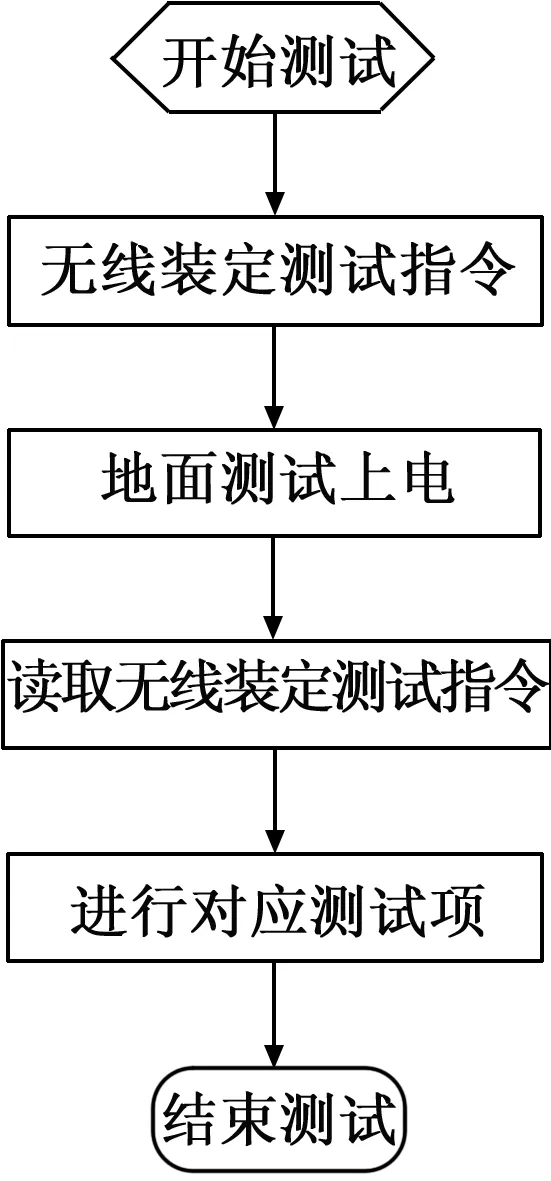
图8 地面测试流程图
4 飞行试验
完成系统的设计后,在051基地阿拉善试验靶场用实物进行了飞行试验,发射PGK编号为3-9#和3-5#的修正弹。
3-9#PGK的供电时间为46 s,GPS模块全程有收星数,且收星数在3-10之间波动,如图9(a)所示。通过地磁测量模块测量所得的弹体滚转角数据的局部放大图如图9(b)所示,滚转角在0~360°范围内变化,说明地磁测量模块工作正常。

图9 3-9#PGK测试结果
3-5#PGK的磁力矩电机正常发电27.6 s,因此记录了27.6 s的数据,GPS于2.1 s时开始定位,全程均有收星数,收星数在0~11之间波动,如图10(a)所示。飞行试验的滚转角局部放大图如图10(b)所示,显示滚转角在0~360°之间变化,因此地磁测量模块工作正常,证明此系统可以初步完成模块功能的实现。

图10 3-5#PGK测试结果
5 结束语
本文提出采用DSP设计一体化的高精度PGK控制系统,从硬件设计和软件设计两方面详细地介绍了控制系统的组成与功能,并通过飞行试验检测了组件GPS模块和地磁测量模块的功能。系统的优势在于实现了制导与控制的一体化,改善了以往多个子系统协同作用导致的系统抗干扰能力差、可靠性低的情况,提高了导弹的打击能力和作战能力,不过对于算法和系统的优化仍然需要进一步研究。
