风洞模型载荷实验测量系统开发与研究
2019-03-19,,
, ,
(1.中国船舶科学研究中心,无锡 214082;2.上海交通大学 海洋工程国家重点实验室,上海 200240;3.上海交通大学 高新船舶与深海开发装备协同创新中心,上海 200240)
0 引言
模型风载荷测量实验作为风洞的一项基本实验类型[1-2],也是上海交通大学多功能风洞实验室在船海领域一项最为基本的业务。为了得到不同工况(风向角、风速等)准确可靠的风载荷系数,该类型实验需要综合考虑天平零漂、环境温湿度变化、空气密度变化、风速波动等各种因素的影响。
目前实验室该类型的实验测量,还处于一个较低的水平。无专门的测量软硬件系统可用;测量中手工介入频度较高,自动化程度偏低;实验数据无法在线处理显示,出现的问题难以现场发现。以致该类型实验测量效率明显偏低,耗时较长,可靠性不高;当前的实验测量系统及测量方式,已经不能满足将来风洞实验测量的需求。
在风洞实验测量研究方面,国内外虽有不少研究工作值得参考,如实验数据联网及数据库开发[3]、通用数据处理技术[4]、天平技术等等[5-7]。但作为面向实际测量应用的相对偏少,特别是鲜有具体数据处理方法、测控软件可以直接借鉴或应用。
在此背景下,本文将围绕以上这些问题展开相关的应用开发工作。设计实验测量系统软硬件方案,完成多传感器数据采集,进行数据融合得到最终结果;寻求合适的数据处理方法,探讨各因素对试验测量结果的影响,提高测量精度;在此基础上开发在线、集成的风载荷测量试验软硬件系统,以尽量减小测量中手动介入频度,大幅提高测量效率,保证测量精度。具体工作主要包括三方面:A组建风载荷、环境参数、风速测量硬件系统,B开发在线集成的数据采集处理程序,C 分析各相关因素影响。
本文工作的展开,将解决当前风载荷测量实验的现实需求。同时本文将所编写的测量程序共享[8],以期为其它风洞实验测量开发工作提供有益参考。
1 风载荷实验测量系统设计
风洞模型风载荷实验最终要得出一组不同工况的无因次风载荷(力及力矩)系数CF(α),CM(α),即:
(1)
式中,F,M为作用在模型上的力及力矩,α为风向角(0~360°),可通过风洞转盘调整,v为风速,S为模型特征面积,L为特征长度,ρ为测量工况下空气的密度。
由于风洞的控制精度及风洞实验特点,风速并不是严格等于设定值,空气密度也会因温湿度变化而变动[9]。为了提高试验测量精度,需要实时记录每一工况时的环境参数以确定空气密度,同时实时测量风洞风速作为实际风速。
空气密度作为一个重要的实验数据,其无法直接测量,本文采用理想气体状态方程间接确定。
综合各因素后,本文设计了风载荷实验测量系统方案,如图1所示,整个系统包括硬件和软件两部分。其中系统硬件包括三个基本部分:A风载荷测量,由测力天平、应变仪(可选)和数据采集卡组成,B环境参数测量,用以间接确定空气密度,由气压计和温湿度传感器组成,其中大气压因变化极缓慢只记录一次即可,温湿度则每工况实时记录,C风速测量,包括毕托管、微压计和数据采集卡。
而实验测量程序,为满足实验的需求,应具有如下基本功能:
1)风载荷实时测量、在线显示。
2)温湿度实时采集和密度计算。
3)风速实时采集计算。
4)数据在线处理、显示与记录。
5)测量结果自动生成与输出(Excel多页表形式)。
6)良好的扩展性,以兼容不同的仪器设备。
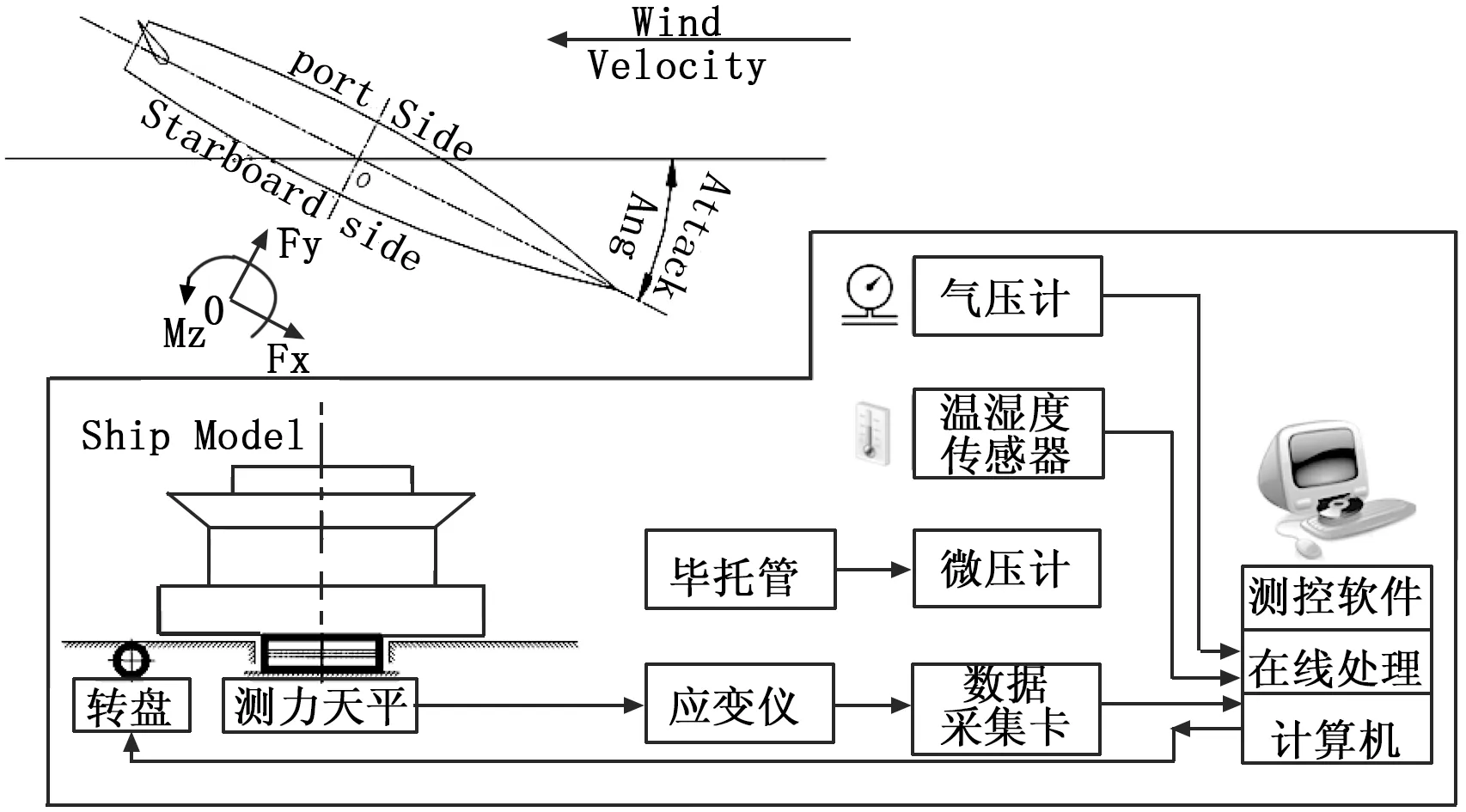
图1 风载荷实验测量系统方案
1.1 风载荷测量部件
该部分是整个测量系统的核心部分,由测力天平、应变仪(可选)、数据采集卡组成,最后由测控程序完成风载荷的在线测量。
数据采集卡采用康泰克多功能AD数据采集卡,其主要能参数为,型号ADA16-8(LPCI),8通道,16位采样,量程-10~10 V,最高采样率100 kHz。
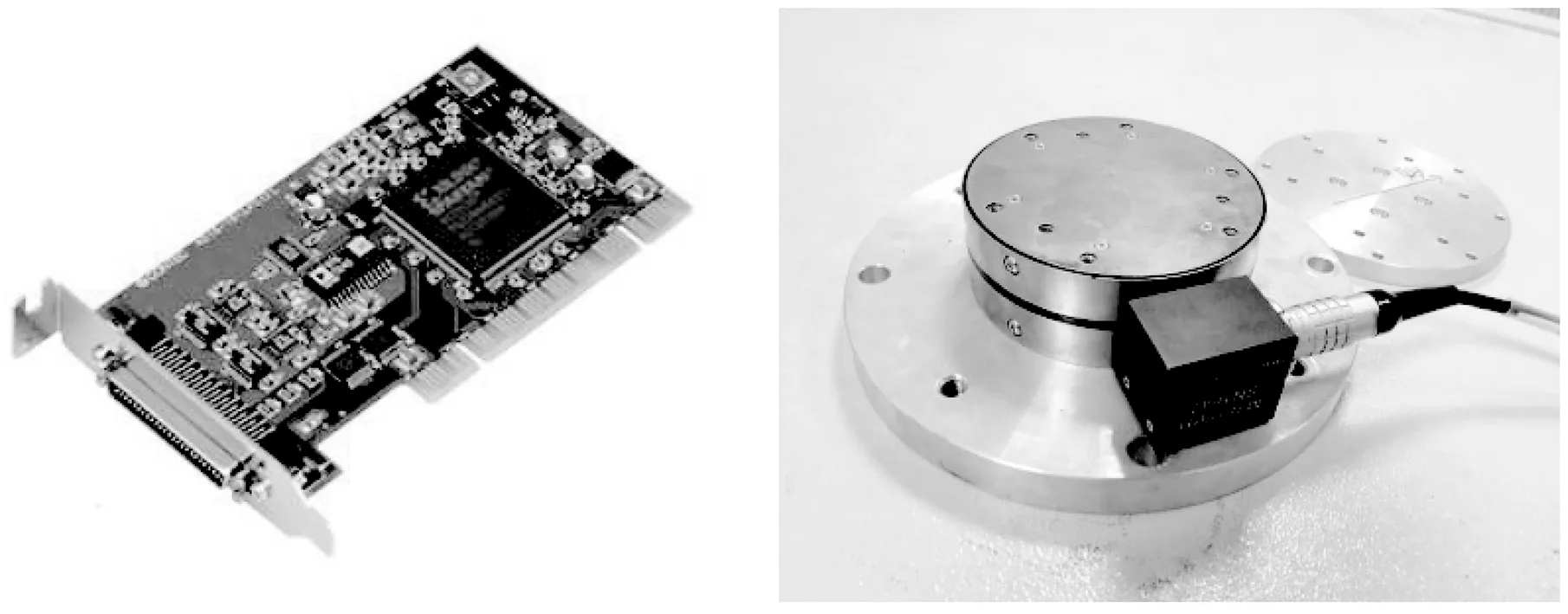
图2 数据采集卡和测力天平
测力天平采用六分量集成式天平,型号Sunrise SRI M3816BH,精度0.5%F.S.,其直接输出六个电压信号。本文中天平的六个输出信号依次接入采集卡的前六个通道。该天平也可直接用其它天平替换,只需将天平系数替换进测量程序即可。
1.2 环境参数测量部件
该部分用于实时确定空气的密度。综合考虑信号传输距离及风洞电磁干扰后, 本文采用数字量传感器,其可以有效地降低电磁干扰且传输距离可保证数百米。
气压计和温湿度传感器采用RS485通讯型数字传感器,其具体参数如表1所示。
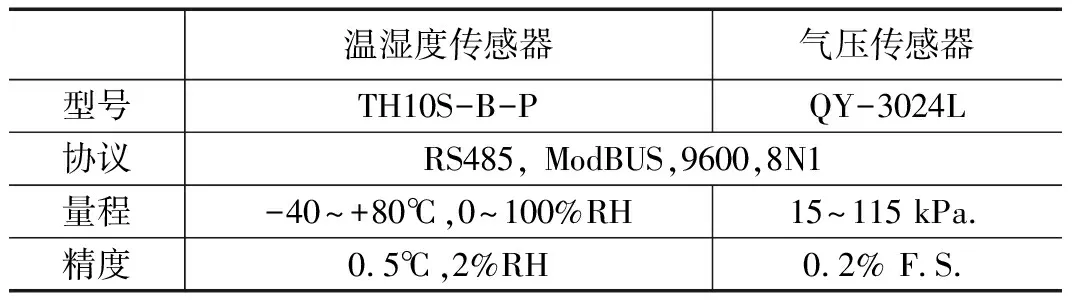
表1 传感器参数
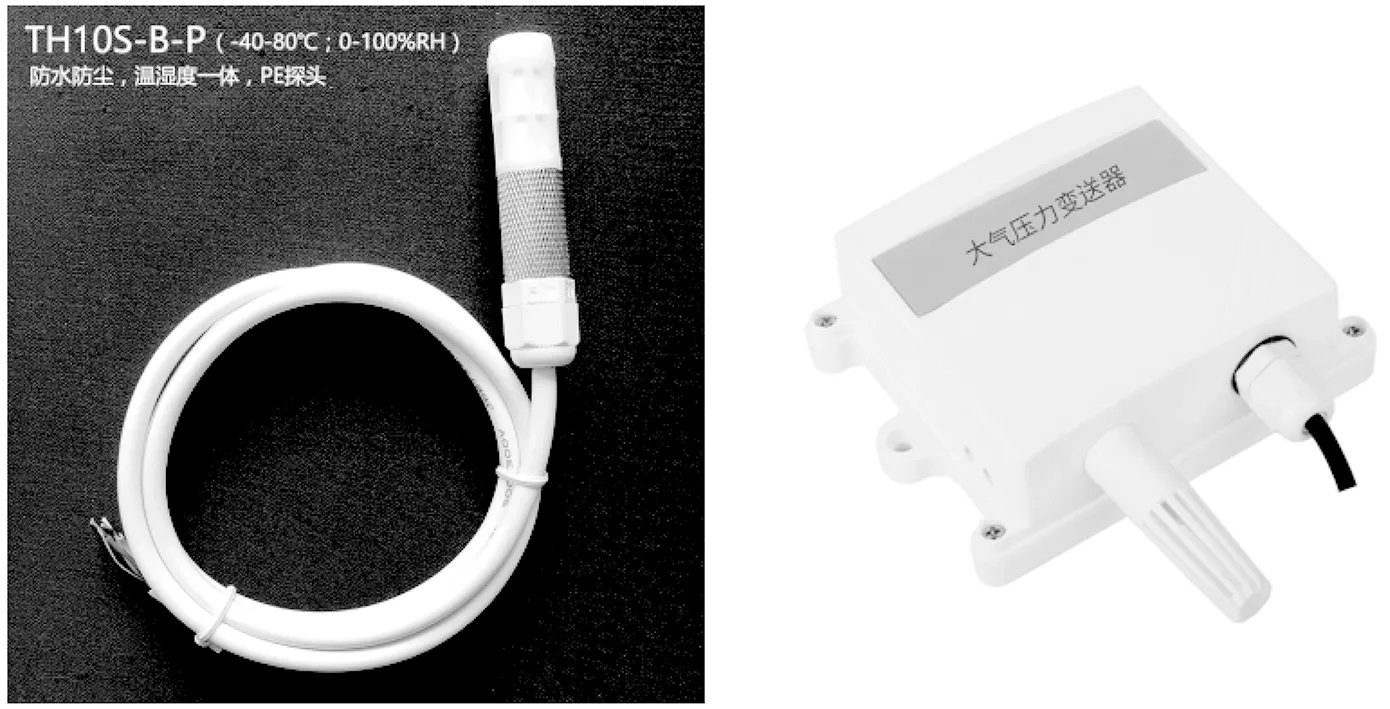
图3 温湿度及大气压传感器
对于大气压,因其变化及其缓慢,本文中大气压力也可由外部高精密仪表读取手动输入。
1.3 风速测量部件
采用毕托管、电子微压计结合数据采集卡实现风洞实时风速的测量。其中,微压计量程400 Pa,模拟电压信号10 V输出,精度0.5%F.S.,本文将其接入采集卡的第七通道;毕托管采用L型两孔毕托管并将其置于风洞中。
在使用之前,相关仪器需要进行系数标定,并将其置入测量程序。
2 数据处理及方法
当考虑到天平零漂、模型自重干扰影响后,模型有效的风载荷F(α)可表示为:
F(α)=F0(α)-Fz(α)-Fw(α)
(2)
其中:F0为未经修正的风载荷,Fz为天平零漂值,Fw为模型自重干扰量。
每一测量工况的零漂值Fz(α),本文中以线性变化原则确定,即:
(3)
其中:Z为实验结束时的零漂值,i为测量工况序号,N为测量工况数目。
风载荷测量试验中,由于模型自重的存在,如果转盘不完全水平的话,模型的自重会以干扰分量的形式作用于风载荷测量结果中,特别是当模型自重很大的时候,其影响必须考虑。
正式实验前,针对每一角度从零度开始进行自重干扰分量测量,测得的干扰量记作Fw(α)。
而实验中其它的数据处理换算方法分别如下,将这些数据代入公式(1)中即可得到最终的风载荷系数。
2.1 风载荷计算方法
测量天平输出的为电压信号,其和载荷F0的换算关系如下:
F0=KU(U-U0)
(4)
其中:KU为传感器标定系数矩阵,U为信号电压(均值),U0为无载荷时电压零点(均值)。
2.2 空气密度的确定
根据气体状态方程,每一工况时风洞内空气密度可根据气压和温湿度确定:
(5)
其中:Pd,Pv分别为空气和水蒸气压力,Md,Mv为其摩尔质量,Md= 0.028 964,Mv=0.018 016 kg/mol,R为气体常数 8.314 J/(K·mol),TK为凯氏温度,而水蒸气压力采用如下经验公式:
其中:α为湿度,T为摄氏度气温。
2.3 风速计算方法
采用毕托管、电子微压计结合数据采集卡实现风洞实时风速的测量;每一工况的风速由下式进行计算:
ΔP=kU(U-U0)
(6)
式中,ΔP为风速压力,U为微压计输出的电压信号,U0为信号零点电压;kU为微压计系数,kP为毕托管系数,而整体风速换算系数为kV=(kU/kp)0.5。
2.4 低通滤波器的处理
本文采用butterworth数字滤波器[10],其滤波方程可以写为代数阶乘形式:
(7)
式中,x(i)为输入数据,也即天平输出的原始电压信号,y(i)为输出,ak,bk为滤波器系数。
3 实验测量程序开发
由于无商用软件可采用,本文自行编写测量程序,各仪器设备的系数已作为默认参数直接内置于主程序中,同时也预留了设置接口于特殊情况下进行手动更改[8]。全部程序采用C语言编写,可运行于win98~win8系统,程序界面如图4所示。
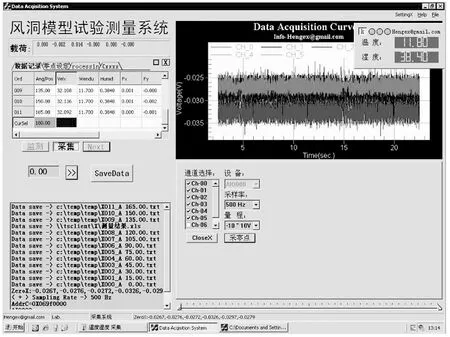
图4 实验测量程序
为了以后扩展兼容的需要,本文中测量程序由两个独立部分组成,即主程序、温湿度和大气压采集;两部分程序启动后完成各自的功能,且自动通讯互联,无需再手动介入。测量中如温湿度等数据失联,程序会自动警示,此时可以手动输入这方面数据以继续进行试验。
在进行测量前,需要先在程序中进行零点采集;实验最后,建议进行零漂采集,以便程序后台进行零漂处理。程序内部已实现风载荷测量结果的自动处理,以Excel文件多页表形式保存数据文件。
实验测量完成后,程序自动处理数据并输出风载荷结果,共包括4组结果,即:
1)原始风载荷测量结果。
2) 经零漂修正结果。
3) 模型自重分量修正结果。
4) 零漂及模型自重分量修正结果。
4 实验测量案例与分析
本文中,实验测量对象为一海工船模型,船模长约L=~1.0 m,主船体完全对称,上层模块左右存在不对称现象,故进行0~360°测量,间隔15°。实验在边界层风场中进行,风洞设定风速v=18 m/s,大气压为100.04 KPa。其中每一测量工况采样时长大于30秒,采样率500 Hz。力的方向如图1所示,Fx指向模型首向,Fy指向左侧,转首力矩Mz以右手向上为正。
下面给出具体的测量结果,并在此基础上分析各种因素对于模型风载荷测量结果的影响。
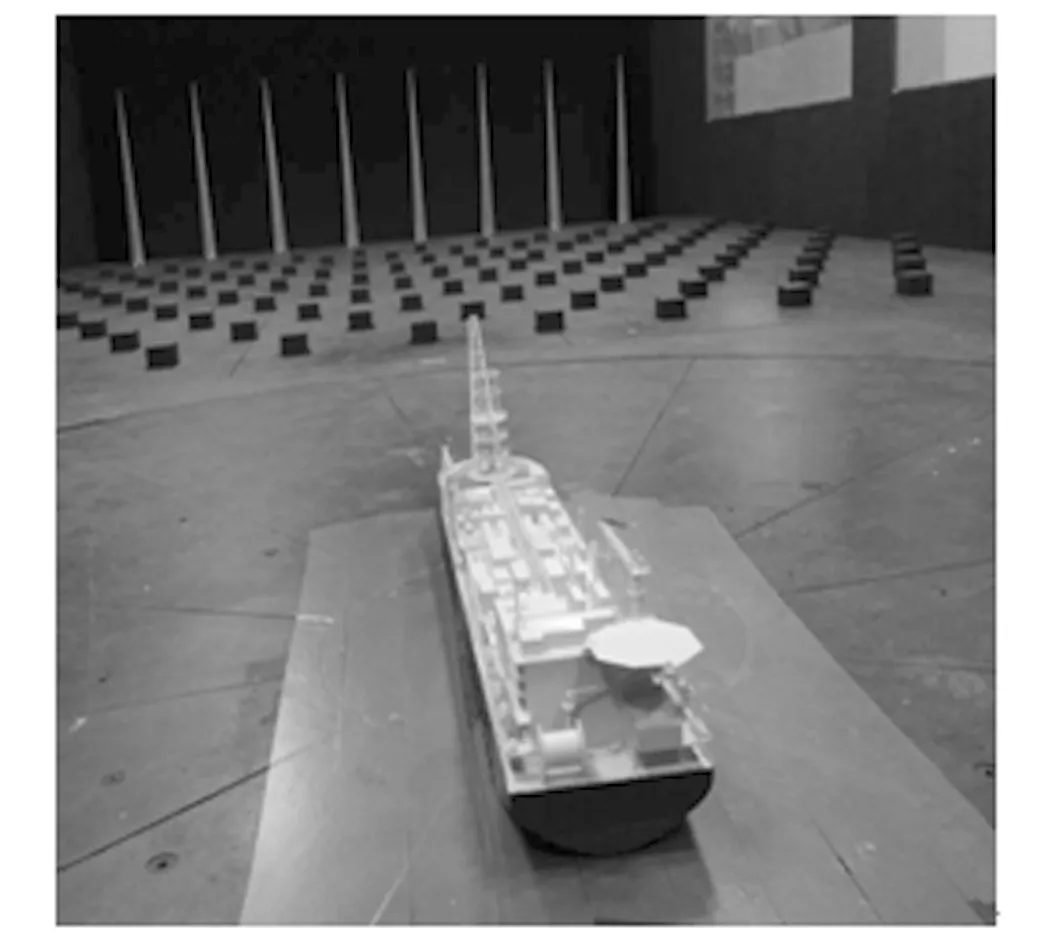
图5 风载荷实验模型
4.1 测量结果
未进行任何处理的风载荷结果如表2及图6所示,其中最大值Fx=3.9 N,Fy=8.6 N,Mz=0.47 N·m。
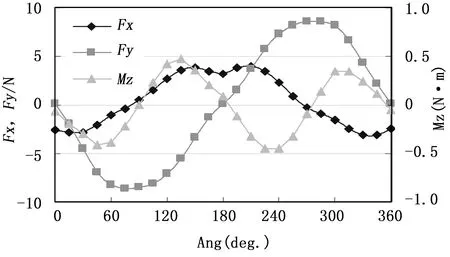
图6 风载荷测量结果(原始数据)
4.2 零漂影响
测量结果显示,最后测得的天平零漂值分别为0.03 N, 0.05 N, 0.002 N·m,相对于测量最大值约为0.75%, 0.58%, 0.43%,其对风载荷结果也有一定程度影响,应该对其修正。
4.3 温湿度及密度变化
整个实验中温湿度变化及空气密度变化如下图所示,其横坐标为工况序号。结果显示温度升高5 ℃,湿度减小9%,而对应的空气密度则由1.092降低至1.076 kg/m3,减小幅度达1.5%,其足以对风载荷系数造成一定的影响,计算时必须采用每一工况的实时密度值。
4.4 风速的波动
整个实验中风速的变化情况如下图所示,变化幅度介于17.956~18.022 m/s之间,变化幅度约0.37%,由误差分析知其对风载荷系数的影响约0.74%,有一定程度的影响。也应采用每一工况的风速进行风载荷系数计算。
4.5 重干扰测量
由于模型的自重比较大,40 N左右,且风洞转盘并不是完全水平,实验之前先进行自重干扰分量的测量,不同角度时结果如图9所示。
结果表明,模型自重会因转盘轴倾斜而产生一个不小的分量作用于天平上,X,Y,Mz方向分量最大约0.13 N, 0.15 N, 0.000 32 N·m,相当于测量结果的3.1%,1.7%,0.07%。可见为保证测量精度,模型自重的干扰不可忽略。
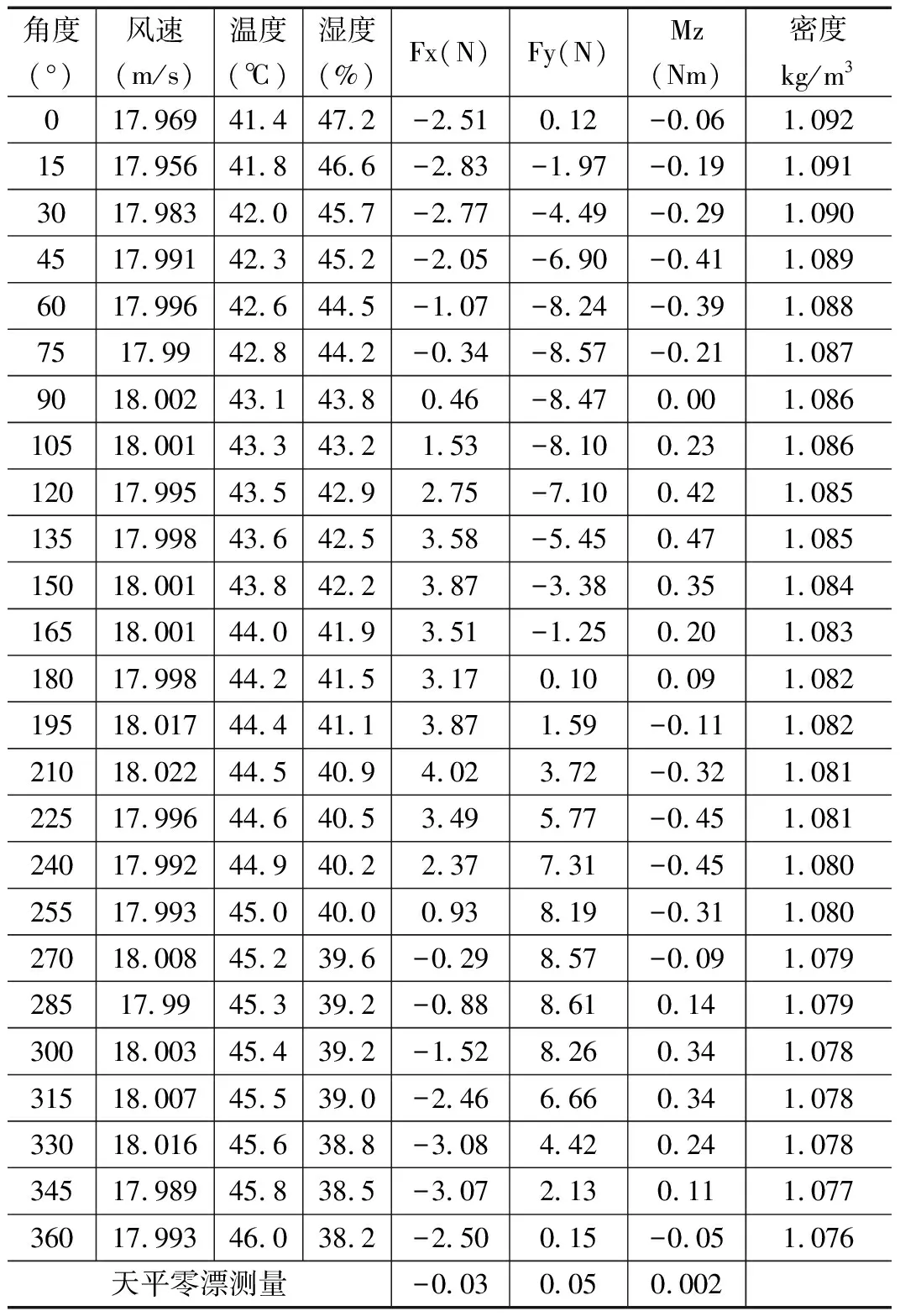
表2 模型风载荷测量结果(原始数据)
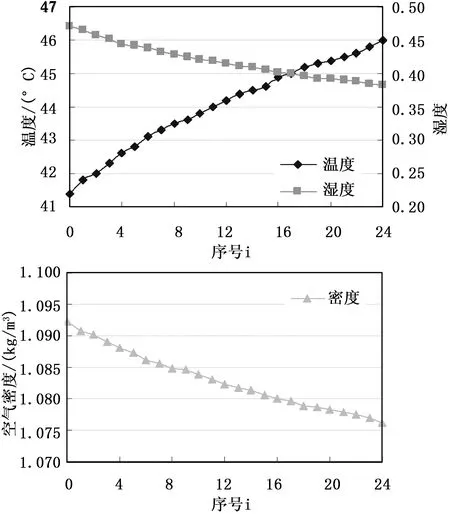
图7 温湿度及空气密度变化曲线
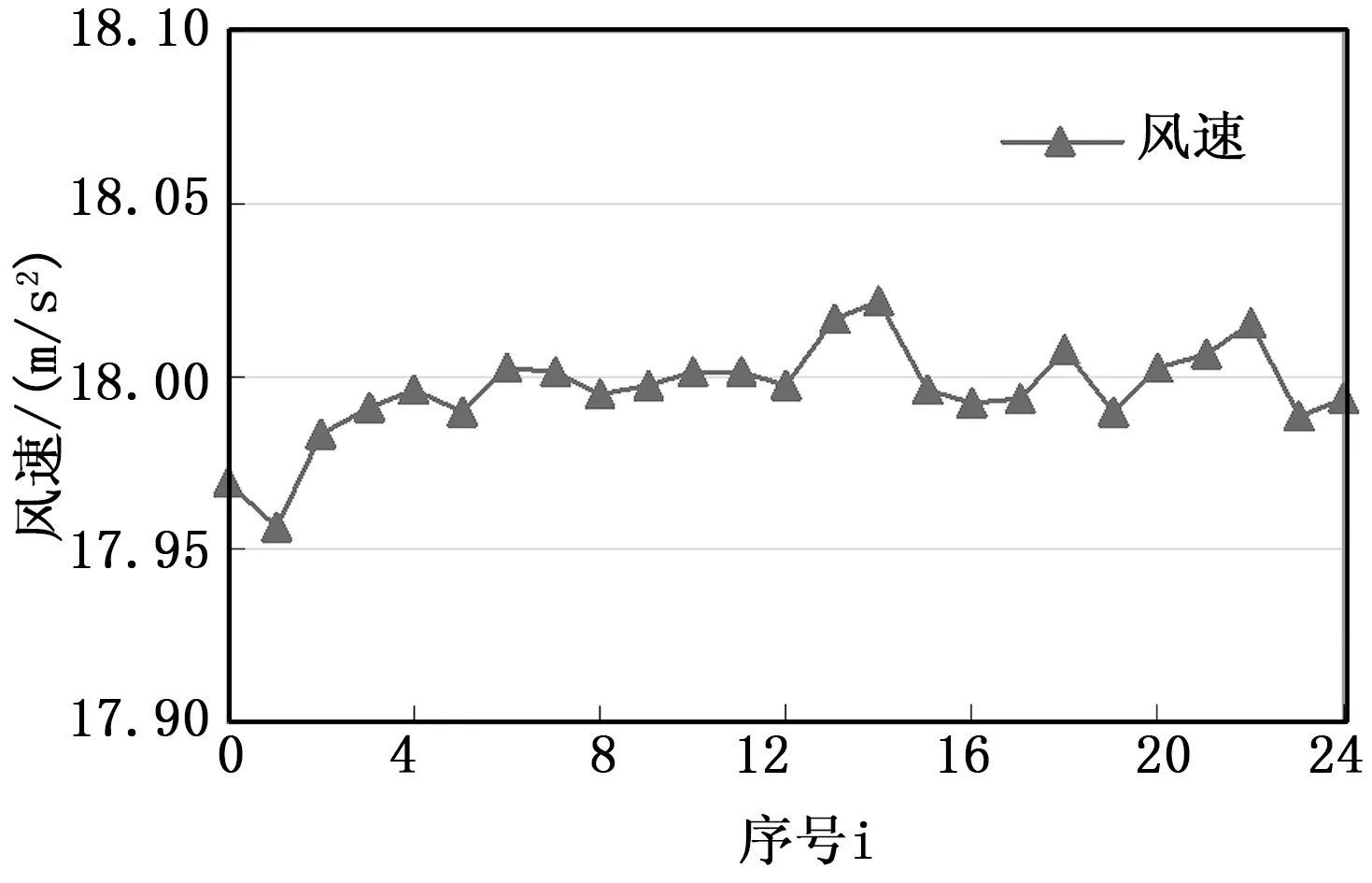
图8 风速变化曲线
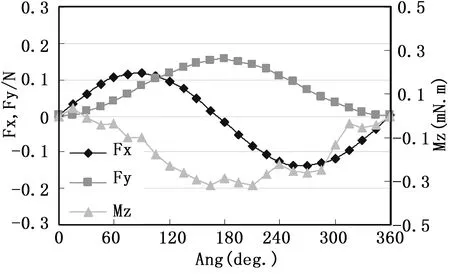
图9 模型自重干扰量随角度变化曲线
4.6 滤波器的作用
为探讨信号噪声(滤波器)对测量结果的影响,选取30度风向角时的0通道电压数据进行滤波对比分析,图中曲线为原始数据,中间曲线为滤波后数据。原始数据采样率500 Hz,滤波器分别取低通1.0、10.0、50、100 Hz,其最终的均值结果分别如下所示。
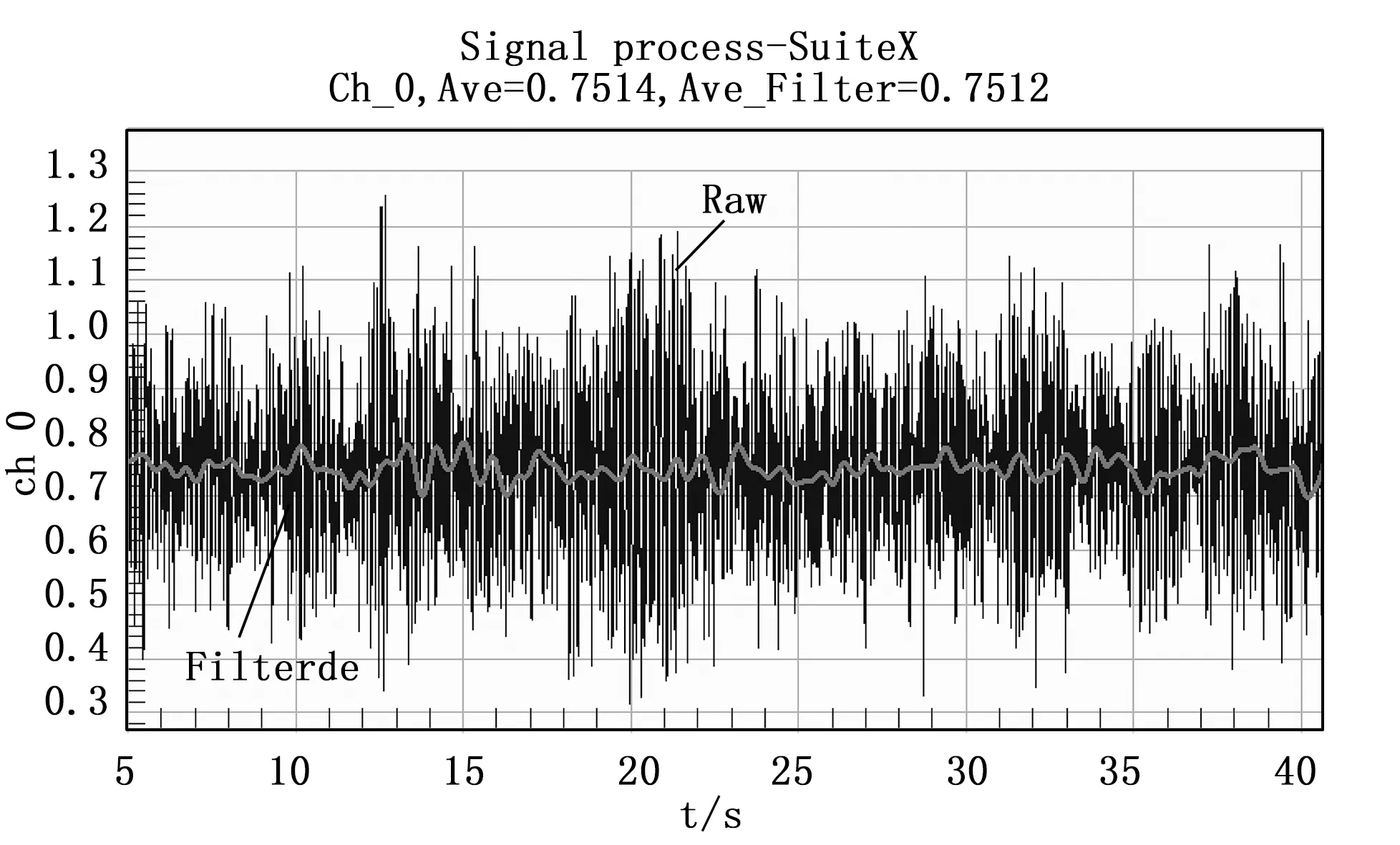
图10 天平信号曲线(30°角,0通道,1 Hz)
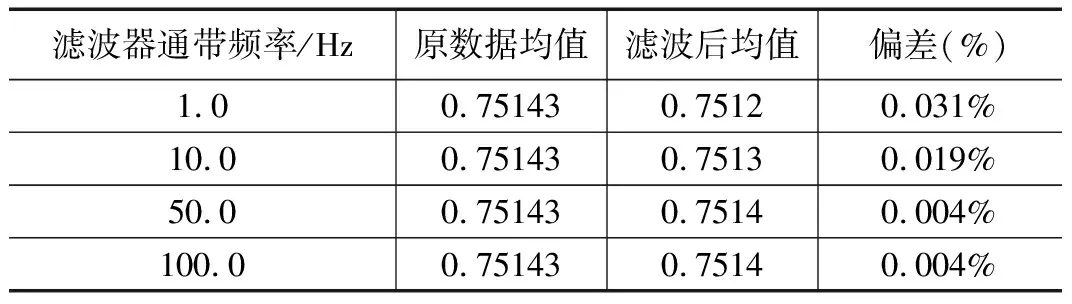
表3 滤波器对均值结果的影响
可见滤波处理对最终均值基本无影响,可以忽略滤波作用。据此可以认为,风载荷模型测量实验可以不进行滤波处理,直接对原始数据进行均值处理即可。
4.7 风载荷系数
综合考虑个影响后,采用公式(1)和风洞实际风速计算各无因次风载荷系数,结果如表4所示。
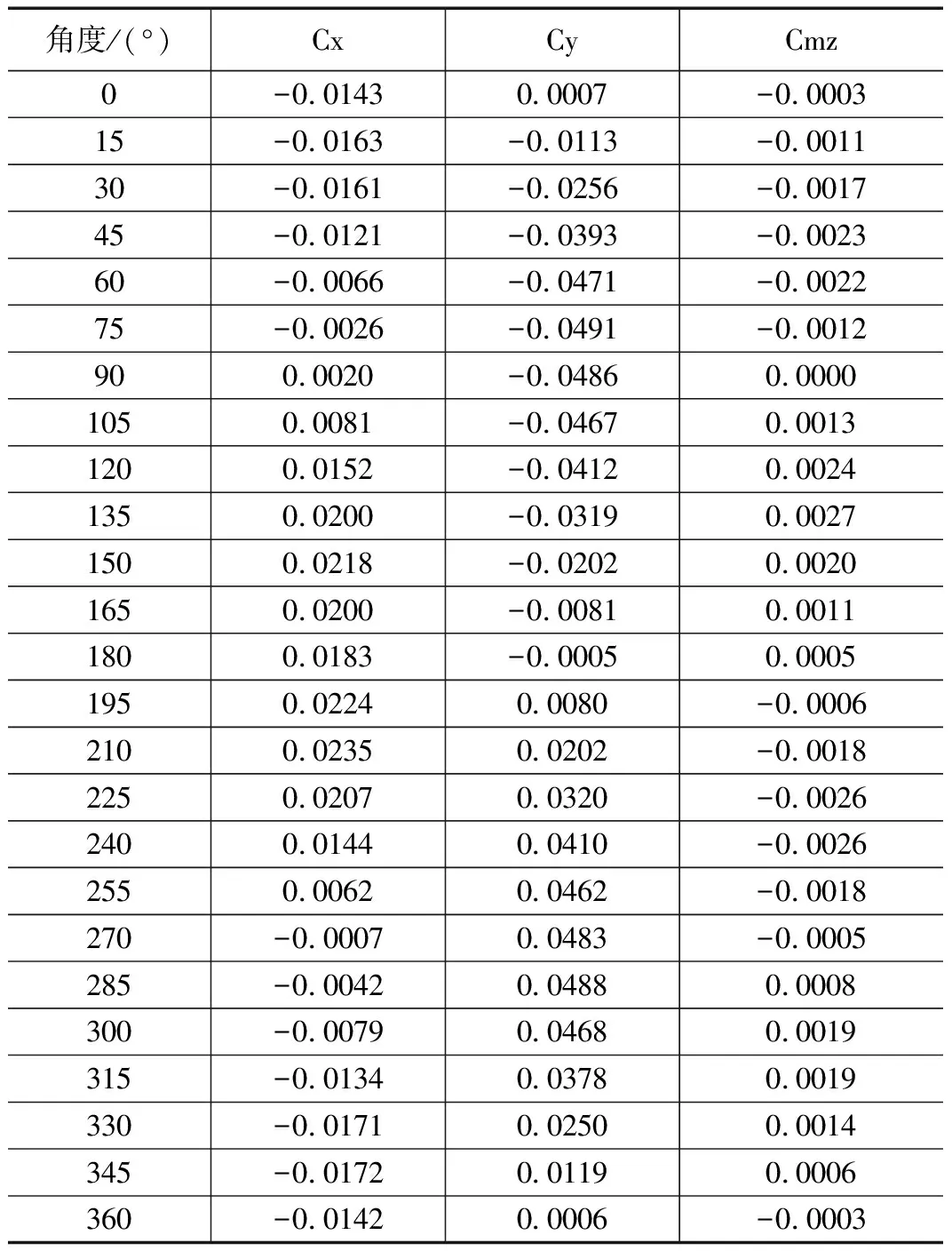
表4 风载荷系数
结果显示,0与360度两个重叠工况的系数仍有细微差别,初步估计为其它小量误差的影响,但绝对值很小,基本可以忽略不计。
5 结语
本文的工作解决了实验室风载荷实验测量的相关技术问题,根据前期研究组建了较为完整的实验测量软硬件系统,给出了完整一套的数据处理方法,在此基础上开发了集成化的测量程序,并成功应用于实际测量。该系统可大幅提高实验测量效率,可靠性也因避免了实验中手工介入问题而提高。通过具体模型风载荷实验探讨了各相关因素对于测量结果的影响,结果表明:
1)实际风速有小幅波动,幅度约0.37%,对于测量结果的影响约为0.74%,计算风载荷系数时应采用实际风速。
2)空气密度在一组实验中,变化最大为1.5%,其影响不能忽略,故计算风载荷系数时需用每一工况时的空气密度。
3)模型自重会因转盘不水平而对风载荷产生干扰分量,特别是自重较大时,其影响必须考虑。
4)通过对测量信号进行滤波处理,结果表明信号噪声对于风载荷均值几乎无影响,滤波器对于风载荷实验没有必要。
为保证实验精度,以上这些相关影响因素应充分考虑。同时为促进测控技术交流,本文开发的软件已全部作为共享软件公开[8]。
