文献扫描机器人多关节机械臂滑膜控制系统设计
2019-03-19
(湖北大学 图书馆,武汉 430062)
0 引言
现阶段针对机器人机械臂滑膜控制的研究主要建立在空间微重力环境的基础上,忽略了机械臂在空间运动过程中产生的跨尺度变化,进而使得机械臂不能始终保持良好的在轨服务,增加了滑模控制的实现难度。文献扫描机器人最早出现于20世纪80年代初期,这种处理型机器人在空间机器人的基础上,通过加设多关节机械臂滑膜组织的方式,实现了对文字、图片等信息数据的分类操作[1]。但在这种机器人保持在轨服役状态时,地面重力、空间微重力等因素都有可能导致机械臂滑膜组织出现严重的执行偏差,进而导致动作执行耗时增加,造成驱使电力资源的过度浪费。
为避免上述情况的发生,现有技术手段借助切换补偿器削弱机械臂滑膜组织的抖振幅度,并通过权值自适应在线建模的方式,对文献扫描机器人多关节机械臂滑膜组织进行定向控制。但随着科学技术手段的进步,这种方法的控制效果始终不能有效迎合基本的反步自适应工作环境。为解决上述问题,利用全局PID滑膜控制器等设备对系统的硬件运行环境进行改进,并通过界定机械臂滑膜动态品质的方式,建立一种新型的文献扫描机器人多关节机械臂滑膜控制系统。
1 文献扫描机器人多关节机械臂滑膜控制系统硬件设计
新型机械臂滑膜控制系统的硬件运行环节包含关键控制电路、全局PID滑膜控制器、多关节滑膜控制器三个主要结构,其具体搭建方法如下。
1.1 关键控制电路设计
新型系统的关键控制电路包含张力采集子电路、控制器采集子电路两个组成部分。张力采集子电路以STM32单片机作为实验核心搭建设备,当相关硬件执行设备开始定向运行后,STM32单片机可以过滤与文献扫描机器人相关的滑膜差分信号,并对主要的输出信号进行放大处理,再利用LM324运放芯片将待传输的差分信号转化为单端信号。在张力采集子电路中,STM32单片机的额定供应电压范围为±1.5 V-±15 V,LM324运放芯片的额定供应电压范围为0~3.3 V,且整个子电路中的所有消耗电阻均为非负状态[2-3]。控制器采集子电路以AD8476时钟芯片作为核心搭建设备,可以截取由张力采集子电路传输出的单端信号,并将其在此转化为滑膜差分信号,与初始滑膜差分信号相比,再次转化后信号自身的SSI通信方式由隔点读取变为了实时读取,且更加满足了机械臂全局PID滑膜控制器的引用需求。完整的关键控制电路结构如图1所示。
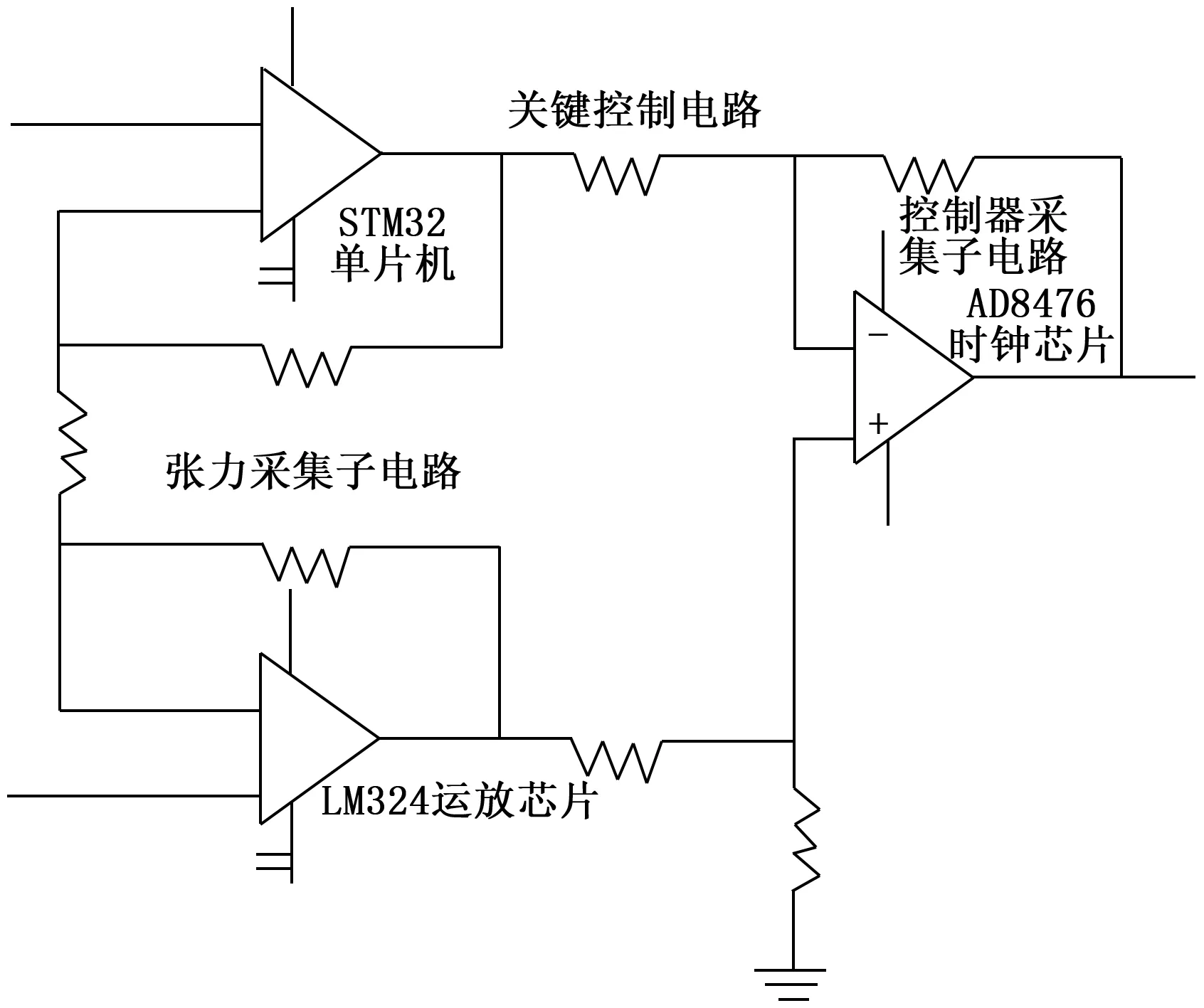
图1 关键控制电路结构图
1.2 机械臂全局PID滑膜控制器设计
机械臂全局PID滑膜控制器保持交叉垂直的传动方式,可以通过大锥齿轮带动传动绳索上的小锥齿轮,再通过不断预紧缠绕钢丝索,达到控制文献扫描机器人运动幅度的目的。为避免多关节机械臂出现严重的抖振现象,PID滑膜控制器具备高阶调制、低阶调制两种关联形式。当关键控制电路向机械臂输送的电子为直流稳定状态时,PID滑膜控制器开启低阶调制模式,在核心处理计算机完成所有文献扫描工作后,机器人机械臂不能快速恢复初始状态,首先在空间环境中做小幅度圆周回撤运动,在保证剩余直流稳定电子完全消耗后,机器人机械臂正好恢复至初始状态,且所有扫描的文献信息也完全传输至各级执行单元[4-5]。当关键控制电路向机械臂输送的电子为交流变频状态时,PID滑膜控制器开启高阶调制模式,核心处理计算机依然保持原有的文献扫描速率,但机器人机械臂在完成每次扫描操作后,必须快速恢复成初始状态,省去了圆周运动阶段,以避免因交流电子混乱而出现严重的紊乱控制现象。具体机械臂全局PID滑膜控制器结构如图2所示。

图2 机械臂全局PID滑膜控制器结构图
低阶调制、高阶调制是两种同时存在的滑膜控制器调节方式,当关键控制电路向机械臂输送的电子中既包含交流变频状态也包含直流稳定状态时,这两种调节方式看同时启动,以保证系统始终具备良好的控制效果。为保证文献扫描机器人多关节机械臂滑膜组织不出现卡顿或明显停滞情况,机械臂全局PID滑膜控制器还具备一定的调节运行能力,一方面实现了对关键控制电路传输电子属性的有效区分,另一方面也达到了统一系统控制形态的目的。
1.3 机器人多关节滑模控制器设计
机器人多关节滑膜控制器具备良好的泛化调节能力,可以在承接关键控制电路输出电子的同时,根据全局PID滑膜控制器的执行状态,切换扫描数据在系统中的运行方向,并最终实现机械臂无卡顿传动的目的。当关键控制电路保持良性电子供应状态时,全局PID滑膜控制器会通过分辨电子结构的方式,选择适宜的调制状态,并适当消耗或抑制系统中的流通电子[6]。从功能性角度来看,机器人多关节滑膜控制器是全局PID滑膜控制器的下属执行结构,可利用主控装置自身携带的捕捉串口,过滤核心计算机在文献扫描操作中出现的无效文件信息,再经由固定输出通道,将这些信息以冗余字符的形式传输至系统数据库,并以此达到扩充控制系统存储容量的目的。当机械臂保持平稳运行时,多关节滑膜控制器始终保持连接状态,并将系统中不能及时消化的文献扫描信息进行汇总整理,并利用输入信道将其分配至各级运行结构,起到承上启下的物理执行功能。图3反应了机器人多关节滑膜控制器的完整结构。

图3 机器人多关节滑模控制器结构图
数据库作为系统中最大的控制数据存储组织,具备较强的数据吸收能力。在感知到输出信道中包含文献扫描信息时,数据库首先将自身存储单元分隔成多个小型包含结构,再对每个结构设定合理的存储门限值。当文献扫描信息进入数据库后,所有包含结构均有闭合状态转化成开启状态,在保持数据自身排列结构完整的前提下,判断这些数据中可供滑膜控制操作使用有效信息的确切含量[7]。当有效信息总量满足核心计算机的应用需求时,数据库行使存储功能,否则再进行上述吸收操作。整合上述所有搭建步骤,完成文献扫描机器人多关节机械臂滑膜控制系统的硬件运行环境搭建。
2 文献扫描机器人多关节机械臂滑膜控制系统软件设计
在系统硬件运行环境的基础上,按照控制传感器标定、动态滑膜方程建立、滑膜品质界定的操作流程,实现新型系统的软件运行环境搭建,两相结合完成文献扫描机器人多关节机械臂滑膜控制系统设计。
2.1 机器人控制传感器标定
系统核心计算机借助输出信道将文献扫描数据传输至SSI单片机,在根据示波器中显示的机械臂滑膜组织的消耗时钟信号,校验扫描传感器中的刚性连接条件。当多关节机械臂的编码节点保持簇拥分布时,机器人控制传感器中会出现一段连续的编程代码,为了保证刚性连接条件不受到文献扫描数据总量变化的影响,机器人控制传感器会按照一定的物理标准对代码进行截取处理,再根据滑膜组织的连接条件建立全新的代码链,这整个操作过程即为机器人控制传感器的标定处理[8]。因SSI单片机可存储大量的文献扫描数据,且不会对数据的原本连接形式造成任何影响,机器人控制传感器标定操作只需限定机械臂滑膜组织消耗时钟信号的波动周期,并在其中挑选出峰、谷值均完整的一整个波长,作为主要标定依据。具体机器人控制传感器标定操作流程如图4所示。

图4 机器人控制传感器标定流程图
2.2 等效控制及动态滑膜方程建立
等效控制及动态滑膜方程是机械臂滑膜动态品质界定的标准条件,在全局PID滑膜控制器、机器人多关节滑膜控制器保持良好输出能力的情况下,系统数据库会不断提升自身的文献扫描信息吸取能力,直至达到设备的物理存储上限y[9-10]。受到机器人控制传感器标定处理结果的影响,多关节机械臂滑膜组织在执行控制程序时,会自发的保持兼性挑选状态,即在滑膜组织可控性较强的情况下,机械臂的运动连贯性较强;在滑膜组织可控性较弱的情况下,机械臂的运动连贯性较弱。设u代表多关节机械臂滑膜组织的执行可控性系数,i↑、i↓分别代表强连贯性运动参数、弱连贯性运动参数,利用u可将i↑、i↓表示为:
(1)
其中:w、q分别代表机械臂滑膜组织执行可控积分的上、下限数值,Cr代表机械臂能承受的文献扫描量,r代表滑膜组织的基本控制向量,p代表强连贯性滑膜运动的控制条件,t代表基本关联幂次项系数,λ代表弱连贯性滑膜运动的控制条件。联立数据库物理存储上限y可将文献扫描机器人多关节机械臂的等效控制及动态滑膜方程表示为:
(2)
式中,k代表等效控制系数,f(s)代表与滑膜组织动态条件相关的定义函数,s代表滑膜组织的某定点控制参量。
2.3 机械臂滑膜的动态品质界定
机械臂滑膜的动态品质直接决定新型控制系统的主观应用价值,是整个系统搭建过程中的末尾环节。为保证机械臂滑膜组织具备良好的文献扫描能力,定义x代表机械臂的平均滑膜水平,在等效控制及动态滑膜方程具备描述能力的前提下,平均滑膜水平x的变化范围仅与关节传动系数ε、参与传动操作机器人关节数量n产生关联影响,其具体计算方法如公式(3)所示。
x=-nsign(∠β)-bε
(3)
其中:∠β代表文献扫描机器人多关节机械臂在操作运行过程中出现的最大弯曲角度,sign(∠β)代表最大弯曲角度的正弦值,b代表机械臂关节的传动周期。设v代表一个标准的机械臂滑膜品质节点,联立公式(3)可将机械臂滑膜动态品质界定结果表示为:
(4)
式中,χ代表系统总控制系数的倒数,c代表平均滑膜水平的最高执行幂次项系数,μ、φ分别代表滑膜控制标准中两个不同的常项系数。在保持硬件执行设备具备较强运行能力的前提下,整合所有参数计算结果,完成文献扫描机器人多关节机械臂滑膜控制系统设计。
3 实验结果与分析
为突出说明文献扫描机器人多关节机械臂滑膜控制系统的实用性,设计如下对比实验。以搭载PID控制器、控制传感器等硬件设计的计算机作为实验对象,并在相同实验环境下模拟文献扫描机器人多关节机械臂的运行状态,分别应用新型系统、传统系统对模拟计算机的运行情况进行控制,其中前者作为实验组、后者最为对照组,在不改变其它外界条件的情况下,详细分析实验数据的变化情况。
3.1 实验参数准备
下表反应了本次实验过程中,相关实验数据的详细准备情况。

表1实验参数准备表
为保证实验结果的绝对公平性,实验组、对照组实验参数始终保持一致。
3.2 机械臂关节的传动能力对比
在控制模拟器容量为1080T的前提下,保证文献扫描机器人的关节条件参量为0.66,分别记录在60 min的实验时间里,应用实验组、对照组控制系统后,机械臂关节传动能力的变化情况,详细实验对比结果如表2~3所示。

表2 机械臂关节的传动能力对比表(实验组)
分析表2可知,实验组机械臂关节传动能力总是保持阶梯状变化趋势,且在实验前期、中期阶段,这种变化趋势始终保持为上升,以15 min作为一个时间阶段,每一阶段内的机械臂关节传动能力始终保持一致。整个实验过程中,实验组机械臂关节传动能力的浮动趋势相对较为稳定,只在20 min、35 min、50 min三个节点时间处,出现小幅度的变化,平均传动水平超过90%,系统可行性相对较高。

表3 机械臂关节的传动能力对比表(对照组)
下降分析表3可知,对照组机械臂关节传动能力呈现下降、稳定、下降的变化趋势,但实验前期的下降幅度明细高于实验后期。30~45 min之间,对照组机械臂关节传动能力持续出现15 min的稳定状态,可认为该数值是实验组系统的极限数值,随实验时间的增加,对照组系统突破该数值后,依然会出现明显的下降趋势,证明对照组机械臂关节的传动能力存在明显的可提升空间。综上可知,在控制模拟器容量为1080T的条件下,应用文献扫描机器人多关节机械臂滑膜控制系统,可使机械臂关节的平均传动能力水平提升19.48%。
3.3 反步自适应参数对比
在滑膜控制系数为0.19、文件扫描条件为0.34的条件下,分别记录在60 min的实验时间里,应用实验组、对照组控制系统后,机器人多关节机械臂反步自适应参数的变化情况,详细实验对比结果如图5~6所示。
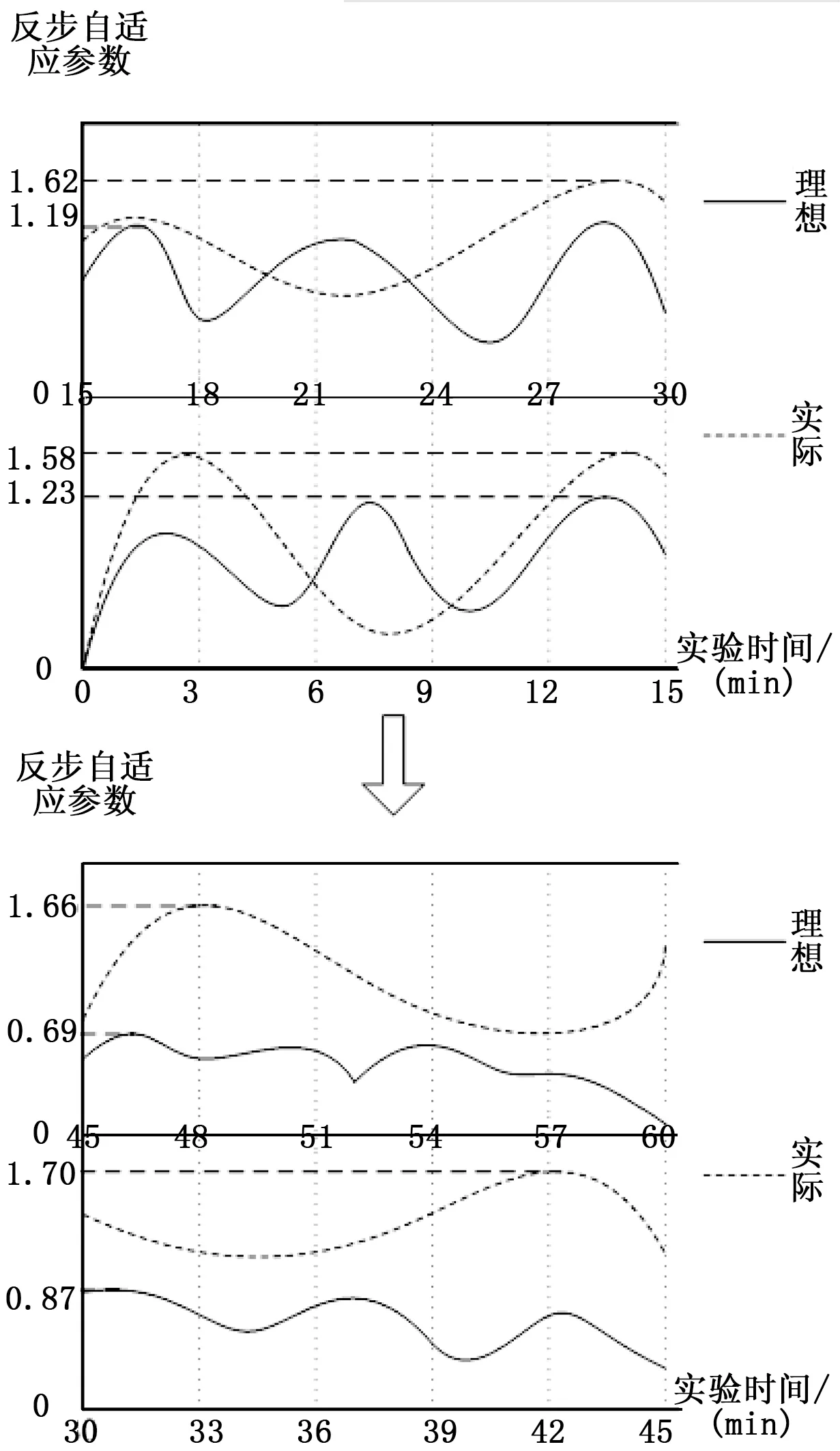
图5反步自适应参数对比图(实验组)
为清晰表述实验组反步自适应参数的变化情况,以30 min作为实验节点,将实验结果人为划分成前期、后期两部分。图5中上半部分代表实验前期实验组反步自适应参数的变化情况,下半部分代表实验后期实验组反步自适应参数的变化情况。对比实验前半部分实验组反步自适应参数最大值1.58、1.62可知,随实验时间增加,反步自适应参数不断增大,远高于理想最大值1.23、1.19。对比实验后半部分实验组反步自适应参数最大值1.70、1.66可知,随实验时间增加,反步自适应参数不断减小,但依然远高于理想最大值0.87、0.69。
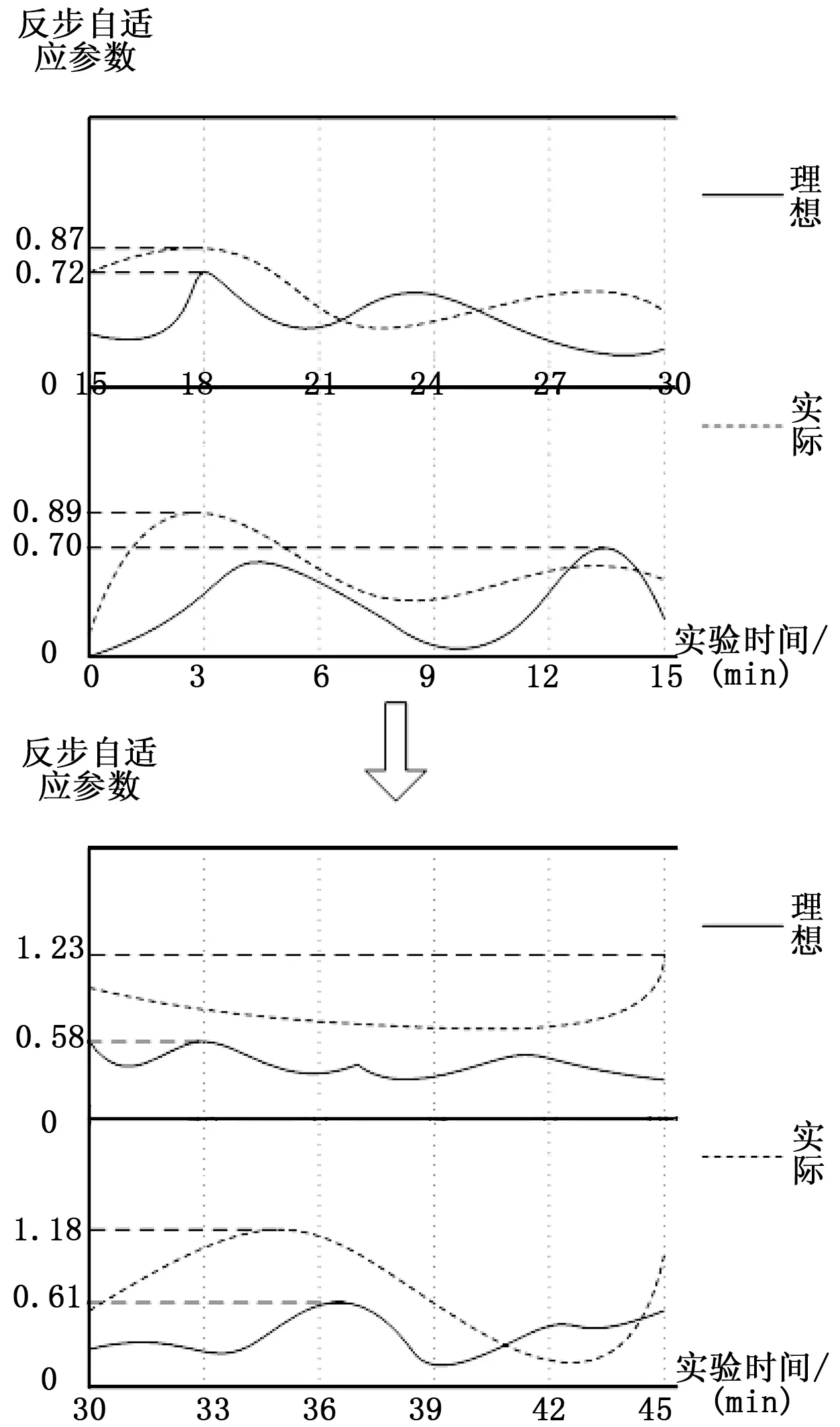
图6 反步自适应参数对比图(对照组)
为清晰表述对照组反步自适应参数的变化情况,以30 min作为实验节点,将实验结果人为划分成前期、后期两部分。图6中上半部分代表实验前期对照组反步自适应参数的变化情况,下半部分代表实验后期对照组反步自适应参数的变化情况。对比实验前半部分对照组反步自适应参数最大值0.89、0.87可知,随实验时间增加,反步自适应参数不断减小,与理想最大值0.70、0.72间的物理差明显低于实验组。对比实验后半部分对照组反步自适应参数最大值1.18、1.23可知,随实验时间增加,反步自适应参数不断增大,但与理想最大值0.61、0.58间的物理差依然明显低于实验组,且在整个实验过程中,对照组反步自适应参数始终不能超过实验组。综上可知,在滑膜控制系数为0.19、文件扫描条件为0.34的条件下,应用文献扫描机器人多关节机械臂滑膜控制系统,可使反步自适应参数最大值提升0.47。
4 结束语
在STM32单片机等硬件设备的支持下,关键控制电路可以机械臂全局PID滑膜控制器、机器人多关节滑膜控制器等运行单元结构进行良性控制,且随着机器人控制传感器标定结果清晰化程度的不断增加,等效控制及动态滑膜方程可对机械臂自身动态品质界定提供可应用的物理条件。在控制器、传感器等设备型号已知的前提下,对比相同实验时间内的实验数据可知,文献扫描机器人多关节机械臂滑膜控制系统可在提升机器人机械臂关节传动性能的基础上,使其保持在良好的反步自适应工作环境中,具备较强的实际应用价值。
