车载稳定平台系统的设计
2019-03-18范峰岩
范峰岩
(山西大众电子信息产业集团,山西 太原 030024)
1 概述
车载稳定平台是加装于运动载体上的光电设备的重要组成部分,它是一个机电控制系统,其作用是隔离载体的角运动,防止因载体在运动过程中产生的抖动和滚动,而丢失目标,使光电探测器件能按预定的方式搜索目标和实时对准目标[1]。
载车的运动使自动平台在空间六个自由度上都有速度和加速度产生,这对自动平台的角度测量和实时补偿能力提出了非常苛刻的要求。运动中,车体的侧倾、俯仰和横摆运动都会对车载光电设备(CCD、激光雷达、夜视仪、观瞄设备)的视线造成扰动,此时获取的外部环境信息量突变性大,具有不连续性,必须经过复杂的姿态矩阵变换后才能对其进行处理和识别[2,3]。为了消除上述影响,通常在车体与传感器之间安装可有效隔离载体运动的稳定平台来实现视线稳定,使传感器视线在大地坐标系中保持稳定,从而实现车载传感器系统对目标的可靠、高精度跟踪与测量。
2 工作原理
2.1 逻辑关系
自动调平系统分成三个部分:控制部分、检测部分和执行部分。三个部分构成一个完整的闭环系统,其相互之间的逻辑关系见图1。
控制部分接收外部控制命令和检测部分反馈的信号,向执行部分输出控制信号,控制器、驱动器属于此部分。执行部分接收控制部分的控制信号,产生指定的动作,电机、蜗轮蜗杆减速器、丝杠撑腿属于此部分。检测部分测得倾斜角、位置量等数据,转换为电信号后向控制部分输出,倾角传感器,撑腿中的位置传感器和压力传感器均属于此部分。

图1 自动调平系统逻辑关系简图
2.2 支撑方式
如图2可知,台面的支承采用四点支承,1,2,3,4分别表示支腿的编号。每个支腿都采用螺旋升降机及相应传动机构组成,通过电机驱动螺旋升降机,经由蜗轮蜗杆的传动,让其电机的旋转运动转变为支腿的直线运动,从而到达支腿的上升和下降的目的。这种方式必然会产生所谓超静定问题,即四支撑腿中会有一支“虚腿”不受力或受力很小。为解决这个问题,通常采用监测撑腿承重的方法。即在撑腿中加装压力传感器,调平过程中不断比较四支撑腿的受力,调平完成时应保证各自受力的均衡。
为方便算法设计,四支撑腿的安装应形成一个长方形,倾角传感器的两个检测方向分别与该长方形的两条相邻边平行。
2.3 调平过程
车辆到达目的地并开始架设后,操作人员接通电源并按下启动按钮。控制器收到启动指令后,首先读取倾角传感器的信号,判断当前平台是否满足水平精度要求。如果不满足,则判断四个撑腿中哪个最高,然后驱动其它三个撑腿向其靠近。同时不断读取倾角传感器信号,与要求的水平精度进行比较。水平精度达到要求范围后,调平停止,撑腿锁定。设备工作过程中,倾角传感器继续监测平台水平,一旦发现水平丢失,控制器即产生报警信号。操作人员可将撑腿解锁,再次启动调平过程,此时一般经过微调即可恢复水平。图3为自动调平过程流程图(假设撑腿1为最高)。

图2 调平系统简化示意图

图3 自动调平过程流程图
3 平台结构设计
平台简图4显示,支腿安装在台面的四角,上端与平台台面连接,下端支撑在安装面上,通过四台步进电机的带动,使得螺旋升降机上升或者下降。当运载车到达指定地点后,通过消虚腿和调平策略的控制,使得台面满足设备的工作条件。每条支腿的组成部分主要是支撑座、联轴器、步进电机(含驱动器)、螺旋升降机、丝杠、底座、限位开关、手动转轮等。
根据设备的载重、台面质量等数据,支腿的升降装置选用市场上成熟产品螺旋升降机,目前的加工设备和组装工艺能够保证该产品具备抗冲击能力,高强度,低噪音,体积紧凑的特点;以及方案所要求的自锁性,同步性,精度定位,速度控制,推力控制等性能[3,4]。
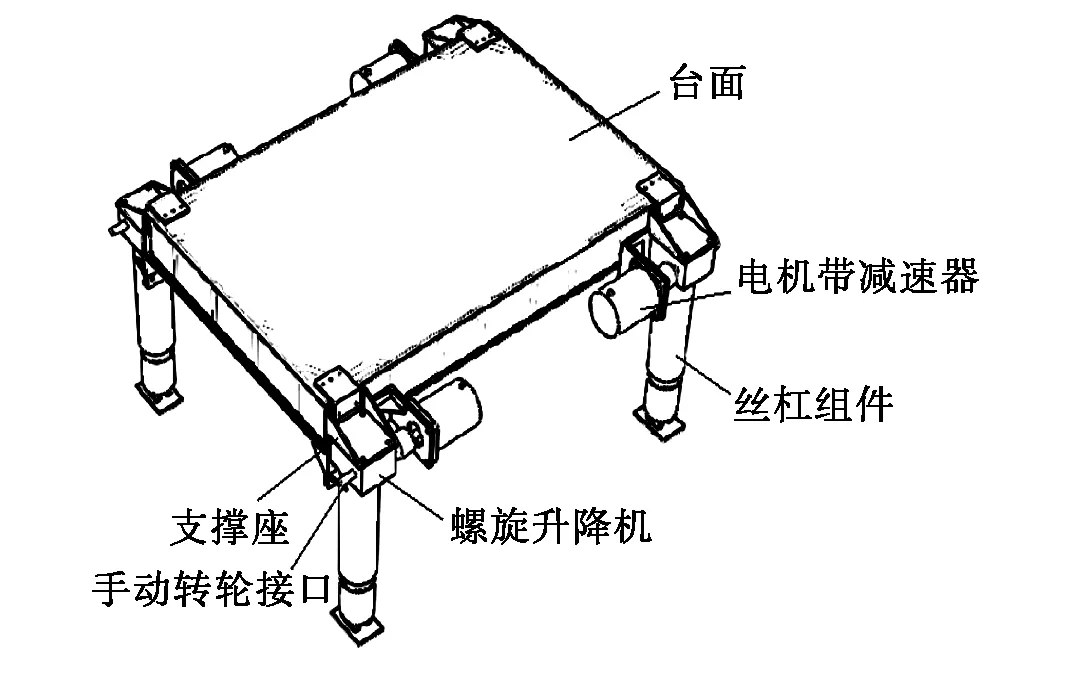
图4 平台简图
电机的旋转动力开始从底座的旋转轴输入,此时驱动螺旋升降机内部的蜗杆旋转,蜗杆驱动具有齿轮的蜗轮旋转,蜗轮蜗杆配合具有减速功能,增大了旋转力矩。蜗轮旋转后,接着跟蜗轮同轴的丝杠也就一起旋转,丝杠外部配有旋转螺母,如果此时限制螺母位置,使其不能旋转,当丝杠被驱动旋转时,螺母便会在丝杠上沿轴向运动,此时便可以实现将电机的旋转运动转化为螺母的直线升降运动,从而能为平台四条支腿的升降提供强劲推力[5]。
4 平台电路设计
4.1 控制部分
控制部分包括操控面板、控制器、驱动器、对外接口等。
操控面板由开关、按钮、指示报警装置、串行通讯口等组成。操作人员操作开关、按钮发出指令,指令通过串行通讯口传给控制器。指示报警装置用于指示系统当前状态,发出错误警示[2]。
控制器由DSP及其外围电路、输入输出接口、电源等组成。输入输出接口包括串行通讯口、A/D接口、D/A接口等。DSP通过串行通讯接口与操控面板和对外接口通讯;通过A/D输入口采集撑腿发来的压力和位置信号[4];通过控制算法计算撑腿运动速度和运动量;通过D/A接口向驱动发出模拟控制信号。
驱动器由DSP控制模块、输入接口、驱动电路、采样电路、电源等组成。DSP控制模块通过输入接口接收控制器送来的控制信号,通过采样电路采集电机状态信号,通过特定的控制算法计算控制量并向驱动电路输出[2]。驱动电路将输入的交流电进行逆变,根据控制模块的控制信号,将需要的控制量向电机输出。
4.2 执行部分
执行部分包括电机带减速器、螺旋升降机、撑腿。
电机和减速器在驱动器的驱动下产生需要的力矩和转速。
撑腿是整个系统的执行终端,包括螺旋升降机、螺母、丝杠、球头支座等。螺旋升降机将旋转运动转换直线升降运动。球头支座可以适应撑腿在升降过程中的角度变化。
4.3 检测部分
检测部分包括双轴倾角传感器、撑腿中的压力传感器和位置传感器。
倾角传感器安装在平台之上,可以同时检测横轴和纵轴两个相互垂直的方向上的平台倾斜角度,并转换为电信号输出。压力传感器检测撑腿所受压力,并将其转换为电信号输出[1,4]。位置传感器检测撑腿螺杆位置并转换为电信号输出。
5 软件设计
自动调平系统软件设计主要是指控制器中DSP的编程,自动调平系统软件主要完成接收、处理操控面板、上位机(或遥控器)的指令,采集倾角传感器、压力传感器、位置传感器等的信号,根据控制算法计算输出控制量,监控系统各部分状态,处理各种意外情况和故障等任务[5]。
5.1 初始化模块
系统上电后,首先应检测并初始化各个组成部分的状态,确保随后调平任务的顺利进行。具体内容包括:读取各传感器信号,与操控面板、对外接口交换数据,通过D/A接口向执行部分送“零”信号(使执行部分静止)[4]。如果接收到的数据有误,还应向故障处理模块发送错误报告。
5.2 串行通讯模块
通过DSP本身的串行通讯接口接收操控面板和对外接口的数据,并将其传送给其它模块。具体内容包括:数据通讯协议,数据接收,数据发送等。
5.3 信号采集模块
通过DSP的A/D输入接口采集各传感器的信号,将它们转换为相应的数值后传送给其它模块。具体包括数据接收模块和数据转换模块。
5.4 控制计算模块
控制算法可采用数字PID控制器,这种算法可以很好地协调精度和稳定性之间的矛盾。自动调平系统要求快速、平稳和精确地到达指定位置,这样在大幅度位置增减设定时,短时间内系统输出有很大偏差,会造成PID运算积分积累,致使控制量超过执行机构可能允许的最大动作范围对应的极限控制量,引起系统的较大超调,甚至引起振荡[3,5]。为此应采用积分分离控制算法,即:当被控量与设定值偏差较大,且为增速过程时,取消积分控制,直接控制系统以最大加速度运转到最大转速;当被控量与设定值偏差较大,且为减速过程时,取消积分控制,直接控制系统以最大减速度运转到偏差设定值;当偏差在设定值范围内时,采用数字PID控制,保证系统的平稳性和精确性[3]。
5.5 故障处理模块
系统运行过程中,可能会发生一些无法预料的事故,比如:水平丢失,器件故障,人工误操作等,一个合格的自动调平系统应该能够随时监测和处理这些事故。也就是说,调平完成后,虽然撑腿锁定,执行部分不再运动,但控制部分必须继续工作,定时向其它各部分发送监测命令,采集并处理各部分反馈的数据,判断是否发生故障,以及故障的位置,并通过操控面板向操作人员报警。
6 结束语
经过仿真试验,该稳定平台满足设计要求,并且较好地解决了调平过程中的锁定、虚腿,大大提高了车载光电设备的稳定性、机动性。平台四条的支腿结构设计和联接方式是保证平台工作性能优良的重要因素,需要分析支腿的受力情况以及形变规律,通过提高传动轴系精度和装配工艺,为平台的结构改进提供方向。
