基于技术原理的城市轨道交通分类方法研究*
2019-03-15魏庆朝潘姿华刘含笑
魏庆朝 潘姿华 刘含笑 李 鸣 魏 然
(1. 北京交通大学土木建筑工程学院,100044,北京;2. 中科合成油工程股份有限公司,101407,北京//第一作者,教授)
铁路与城市轨道交通作为道路与铁道工程学科中两个重要的研究方向已受到越来越多的关注。根据线路的运输性质、列车的运营速度、车辆的牵引传动方式等指标,铁路系统建立了明确分类体系,对铁路行业的建设和经营具有促进作用[1]。相较而言,城市轨道交通发展起步较晚,随着运营环境变化以及在机车车辆、牵引供电、通信信号、基础设施等系统技术上的不断创新,其制式的多样化趋势越来越明显,并由此带来了制式分类标准不统一、城市轨道交通系统分类范围不明确等问题[2]。这些问题制约着城市轨道交通与城市间的协调发展,因此有必要对城市轨道交通分类方法开展深入研究。
1 国内外城市轨道交通系统分类概况
1.1 国外
美国、日本、德国、英国、法国、俄罗斯等是城市轨道交通发展较早、制式较多的国家。不同国家和地区因城市规划和客流需求各异,其轨道交通制式的形成发展和分类标准呈现出不同特点。
美国城市都市圈的轨道交通系统十分发达,按照服务范围和运量,可分为通勤铁路、轻轨铁路和重轨铁路3类,此外还有少量的轨道缆车和轨道导向车[3]。其中,通勤铁路连接市中心与市郊,线路长度在几公里至数十公里不等;轻轨铁路则与我国“有轨电车”相似,主要指运行在市区街道上的电气化轨道车辆,可为一节或多节车厢,与路面其它交通方式共用路权;重轨铁路是指在城市内运行的、由一节或多节车辆组成的使用信号系统和高站台的大能力电气化快速铁路,美国的地铁系统就是其中的代表之一。
日本的城市轨道交通系统依据运量分为大量运输能力和中量运输能力两类;根据运营速度、牵引方式等因素将其分为8种类型[4],其中“大量运输能力”包括日本国有铁路和地下铁道。此外,日本针对城市轨道交通系统的分类方法中对“轻轨”的定义与其他国家稍有不同。日本将在城市郊区及市区内运行,采用混合路面、隔离式轨道或专用轨道的系统称为“街道电车”,而只有采用现代新技术的车辆所形成的系统,才称之为“轻轨交通”[5]。在城市轨道交通发展初期,日本曾将轻轨交通分为有轨电车、市郊有轨电车、地下铁道、铁路电车和新交通系统等5种形式。此分类方法混淆了轻轨交通与其他几类系统制式的界限,很难有效区分各交通方式。
德国针对城市轨道交通系统的分类仅限于轻轨交通,该分类方法将有轨电车改造的不同阶段分为4个等级,并将线路的专用程度、系统的运输能力作为分界条件,而对于系统整体尚未提出严格的分类标准。
伦敦、巴黎、莫斯科等城市也都建有较为发达的城市轨道交通系统,并根据服务地区、运行速度、线路形式等加以分类。表1为国外部分国家城市轨道交通的分类情况。
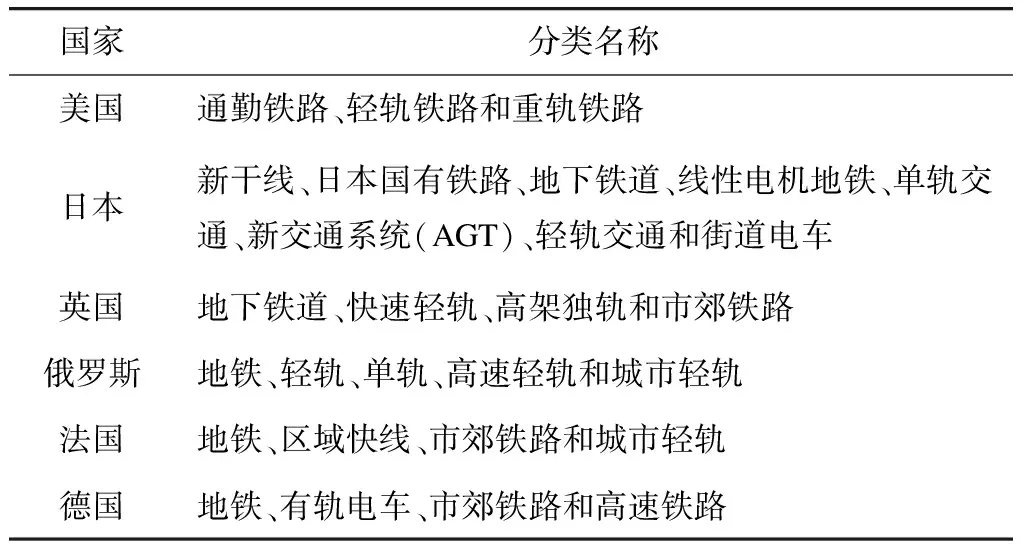
表1 国外部分国家城市轨道交通系统的分类
1.2 国内
我国城市轨道交通制式分类主要参照以下两类标准,分别是CJJ/T 114—2007《城市公共交通分类标准》和JB 104—2008《城市轨道交通工程项目建设标准》。
CJJ/T 114—2007《城市公共交通分类标准》根据车辆类型、线路条件、客运能力和平均运行速度等因素将城市轨道交通系统分为地铁系统、轻轨系统、单轨系统、有轨电车系统、磁浮系统、自动导向轨道系统和市域快速轨道系统[6],除此之外还包括直线电机轮轨系统等新型城市轨道交通制式。根据不同适用条件可以将其进行细化,如表2所示。
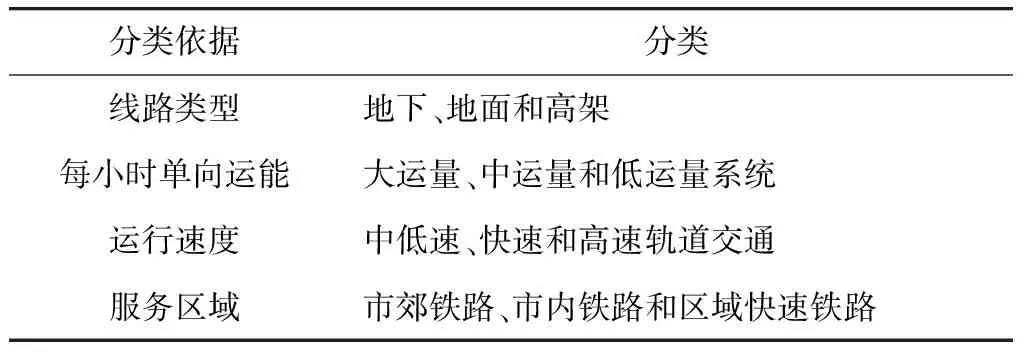
表2 我国城市公共交通系统分类表
JB 104—2008《城市轨道交通工程项目建设标准》按照运量等级对城市轨道交通系统进行了分类,具体分为高运量、大运量和中运量,并依据运量进一步对线路型式、列车类型和列车最高速度等进行划分[7],如表3所示。

表3 城市轨道交通系统分类
此外,我国许多学者对城市轨道交通分类问题也开展了相关研究。文献[8]提出应从容量、经济、目的、环境等方面统筹考虑城市轨道交通制式的选择;文献[9]重新界定了牵引方式、导向方式、线路专用程度、系统运输能力、车辆编组方式等内容,并将城市轨道交通系统分为城市市郊快速铁道、地下铁道、轻轨、单轨、有轨电车,以及由直线电机牵引的城市轨道交通系统和新型城市轨道交通系统。文献[10]提出按照运量和速度两个维度对城市轨道交通系统进行划分,并细化了分类层次。
2 我国城市轨道交通现有分类标准存在的问题
目前,我国城市轨道交通分类标准仍存在较为显著的问题,主要体现在以下两方面。
2.1 制式分类标准不统一
在CJJ/T 114—2007《城市公共交通分类标准》中,地铁与轻轨按照运量进行划分;单轨、有轨电车、磁浮、自动导轨系统等按照驱动方式或导向方式进行划分;市域快速轨道交通系统则按照服务地域范围进行划分。这种分类方式将运量、驱动方式、导向和地域分别作为一项决定性指标,很难系统全面地将包含新型轨道交通制式在内的城市轨道交通进行整体区分。而JB 104—2008《城市轨道交通工程项目建设标准》中分类方法的粒度偏大,实际工程中某些线路主要技术目标可能会超过该标准范围,这就使得一些线路难以按照表3所提供的依据进行归类,并很难把握其分类标准[11]。
目前,针对新型城市轨道交通,如直线电机轮轨交通、单轨交通、自动导向轨道系统等,以运量和速度等级来进行划分的方式已不能满足制式划分需要,其技术标准更新速度严重滞后于技术的发展,难以对其制式种类做出精确的评定。
2.2 分类范围不明确
相比于管道、航空、水运、公路等其它领域的交通方式,城市轨道交通在牵引类型、驱动力来源、支承和导向载体等方面更加丰富,实际应用中不同制式在原理组合上也更加多变,这也为城市轨道交通的制式分类带来难度。
一方面,既有分类标准指标独立性较差和分类范围不明确的现状使得一些线路的重复统计率较高。如珠江新城APM线,既是胶轮路轨系统,又是旅客自动输送系统;重庆轨道交通2号线,既是轻轨系统,又是单轨系统和胶轮路轨系统。此外还有一些线路的分类与称谓未严格遵照规范和标准的要求,如武汉轻轨1号线按照制式分类标准属于地铁。可见,利用现有标准很难将这些线路准确地定位或包含在既有体系中,这就会导致一条线路可能会属于多个系统的情况,为综合规划各项统计工作带来不便。
另一方面,随着客运量不断增大以及服务范围的不断拓展,城市轨道交通制式的设计参数正在逐渐突破既有标准范围,如轻轨线路运量已与地铁客运量相接近,地铁则逐渐向小编组、小间隔和轻车体方向发展。
综上所述,制订一套能够清晰表达系统制式、明确易懂的城市轨道交通制式分类方法将有利于设计人员统筹规划城市轨道交通网络,以及协调城市内多种制式轨道交通的建设,因此极有必要从技术原理角度对城市轨道交通的分类方法进行深入研究。
3 基于技术原理的城市轨道交通分类方法
本文以城市轨道交通系统的技术原理为依据,提出城市轨道交通系统的新型分类方法。该方法的原则、思路及具体内容详述如下。
3.1 分类原则
为保证分类的科学性和合理性,本文提出的分类方法应遵循以下几个原则:
(1) 包容性原则。考虑城市轨道交通制式多样化趋势,新的分类方法应具有包容性和前瞻性,既要满足不同环境下对技术参数的选择,又要与未来的规划和建设需求相适应,为以后的建设和发展留有余地。
(2) 指标独立性原则。为保证制式分类不重不漏,须选取独立指标,并制定准确的分类界限。分类指标应各有侧重,分类方法可以系统而全面地应用于制式分类中,为建设标准和技术参数提供明确的依据。
(3) 惯性原则。城市轨道交通已发展多年,专业领域研究者及普通公众对如“地铁”、“轻轨”等称谓较为熟悉,新的分类方法应充分考虑既有分类标准和习惯用法的惯性现象,因此新的分类标准和称谓应注意与现有技术体系和既有标准间的衔接性和过渡性。
3.2 分类思路
基于系统角度和城市轨道交通制式类型等决定性因素,本文提出基于驱动方式、车辆支承方式、导向方式和轨道类型等4项指标的城市轨道交通分类方法。该分类方法将既有的城市轨道交通制式进行划分,如表4所示。
表4中的分类标准可包含现有全部城市轨道交通系统的类型,具有较强的归纳性和包容性。同时4类指标相互独立,既确保了分类后各制式之间的独立性,又增强了辨识度。
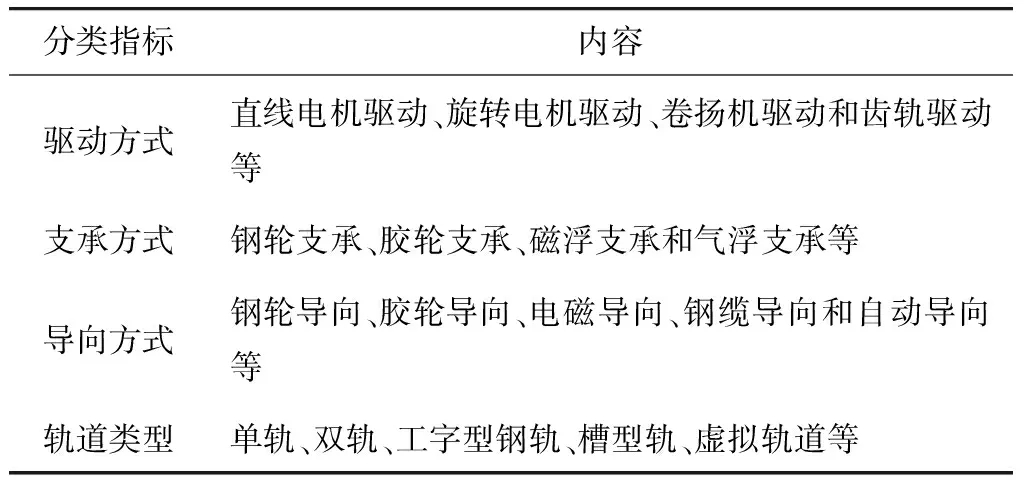
表4 城市轨道交通制式分类指标及内容
(1) 驱动方式。旋转电机驱动是目前应用最多的驱动方式,其定子和转子均安装在车辆上,定子包围着圆筒形的转子,同时定子形成旋转磁场,使转子产生旋转力矩。而直线电机驱动可认为是把旋转电机展成平板状,将初级线圈(或者电枢)和次级线圈(或感应板)分别安装在车辆和轨道侧,并依靠电磁作用而产生推动力。中低速磁浮线路采用短定子直线感应电机驱动,其原理如图1所示。
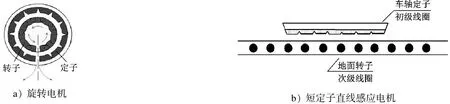
图1 中低速磁浮线路采用的短定子直线感应电机驱动原理图
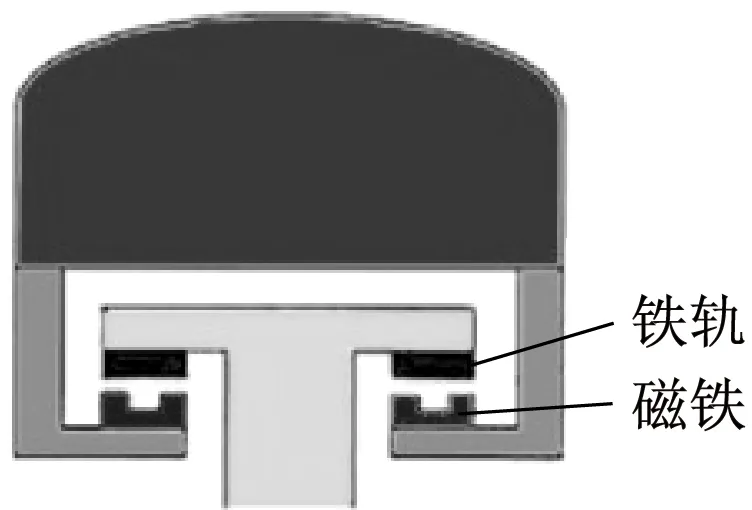
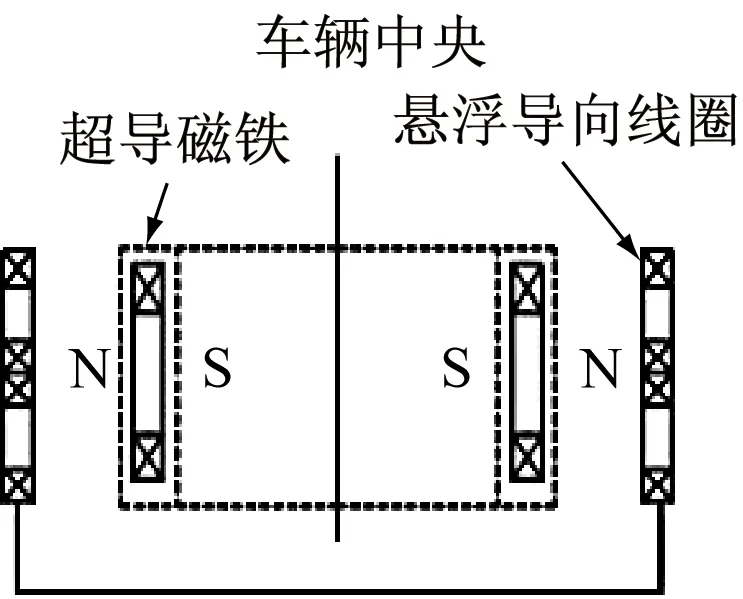
(2) 导向方式。导向方式影响着城市轨道交通系统的结构、运行和建设费用。钢轮钢轨导向具有车辆结构简单、建设和运营成本较低和运行阻力较小等特点;胶轮导向系统具有爬坡能力强、噪声较小等特点;电磁导向具有车轨无接触、运行阻力小和运营速度高等特点。磁浮系统和单轨系统的导向方式如图2所示。
(3) 支承方式。支承方式即车辆与行驶轨道的垂直接触与运行方式。钢轮支承和胶轮支承均是车辆和轨道有实际接触,而磁浮支承和气浮支承则是依靠磁力和气体实现无接触支承。
(4) 轨道类型。轨道类型主要由轨道数目决定。地铁、轻轨等一般依靠两根钢轨运行,称为双轨,采用工字型轨;跨坐式和悬挂式单轨采用单根轨道运行,称为单轨,跨坐式单轨轨道如图2 c)所示。而槽型轨则特指有轨电车中具有凹槽的钢轨形式,槽型轨示意如图3所示。
a) 电磁悬浮导向
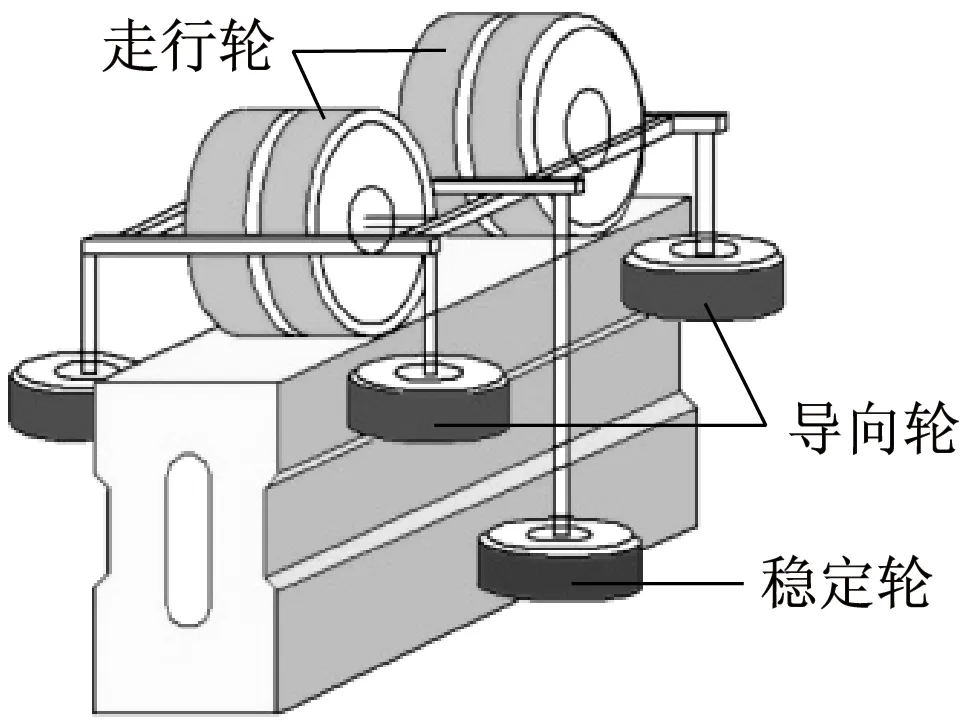
c) 跨坐式单轨胶轮导向
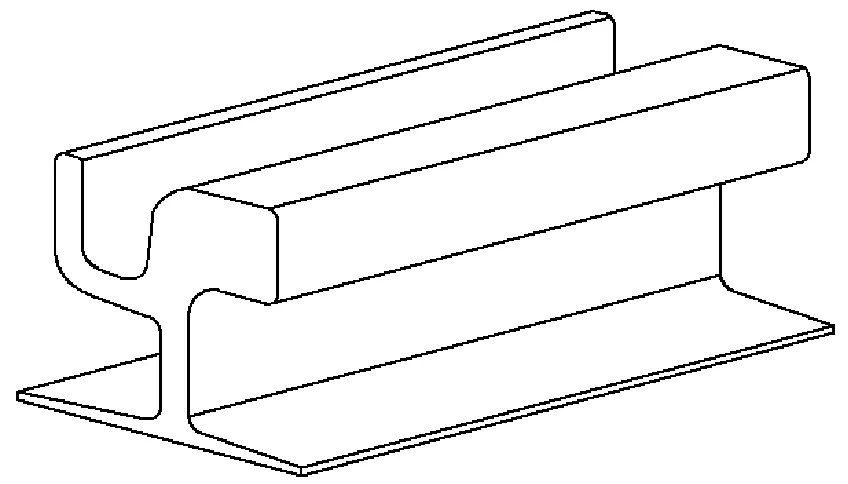
图3 有轨电车槽型轨示意图
此外,采用“虚拟轨道跟随控制”技术的智能轨道快运列车通过各类车载传感器识别路面虚拟轨道线路以实现智能运行[12]。这类新型城市轨道交通在导向方式和轨道类型上与既有制式原理存在很大区别,在分类时应根据新技术的特点作特殊考虑。
3.3 分类方法
考虑以上城市轨道交通系统分类方法的原则和思路,基于技术原理的分类方法包含以下几个步骤。
3.3.1 简化分类指标命名方式
将驱动方式中“直线电机驱动、旋转电机驱动、卷扬机驱动、齿轨驱动”分别简化称为“直驱、旋驱、卷驱、齿驱”;将支承方式中“钢轮支承、胶轮支承、磁浮支承、气浮支承”简化为“钢支、胶支、磁浮、气浮”;将导向方式中“钢轮导向、胶轮导向、电磁导向、钢缆导向、自动导向、气浮导向”分别简化称为“钢导、胶导、磁导、缆导、自导、气导”;将轨道类型中“单轨、双轨(工字型钢轨)、槽型轨”简称为“单轨、双轨、槽轨”。针对新型城市轨道交通系统,如“智轨列车”的“虚拟轨道路线”,可简称为“虚轨”。
3.3.2 组合简化后命名方式
在简化上述分类指标后,按“驱动方式+支承方式+导向方式+轨道类型”的方式进行排列组合,形成新名称。这些新名称与城市轨道交通主要制式间的对应关系如下:①旋钢双轨——地铁、有轨电车;②旋胶双轨——自动导向轨道系统;③旋胶单轨——单轨系统;④直钢双轨——直线电机轮轨系统;⑤直胶单轨——直线电机单轨系统;⑥直磁单轨——磁浮系统;⑦直气单轨——直线电机气浮轨道交通;⑧卷气单轨——缆索牵引气垫交通系统;⑨齿钢三轨——齿轨系统;⑩旋胶虚轨——“智轨列车”系统。
未来,根据驱动方式、支承方式、导向方式和轨道类型的不同可形成多种组合方法,为新型城市轨道交通制式留有较大的预留空间。
3.3.3 命名方法及建议
因上述分类方法与现有制式命名方法在思路、分类指标等方面有较大改变,为更好地衔接与适应,初始阶段给出以下几点建议:
(1) 对于线路较多且广泛使用的地铁线路仍保持原名称不变,建议将其余类型的城市轨道交通线路的名称命名为“×轨”。
(2) 多于2个字的名称,可尽量简化成2~3个字:①建议将“磁浮轨道交通系统”简称为“磁轨”;②因有轨电车的命名只含“车”字,与其他命名中包含“铁”、“轨”等字的称呼相差较大,为保持统一性,建议简称为槽轨或有轨;③建议将“直线电机轮轨交通”简称为“直轨”;④建议将“气浮轨道交通”简称为“气轨”;⑤建议将“自动导向轨道交通”简称为“自导轨”。综合上述两点建议,分析现有城市轨道交通制式的主要特点,总结其简化后的命名,如表5所示。
(3) 建议后续的规划统计工作中,可在保留既有“地铁××号线”的称呼方式的基础上,增加一个技术分类名称。如“北京S1线”可再增加“磁轨”的技术名称。对其它新型城市轨道交通系统的简化命名则可采用抽取该系统制式特点核心词并增加后缀的方法,如直线电机轮轨交通可称为为直轨,其中含直驱地铁和直驱单轨;直线电机气浮轨道交通可称为直驱气轨。对于城际铁路、市郊铁路均可按照该方法进行分类;若所讨论的系统为快速系统,可在上述命名之前再加“快速”等字样。
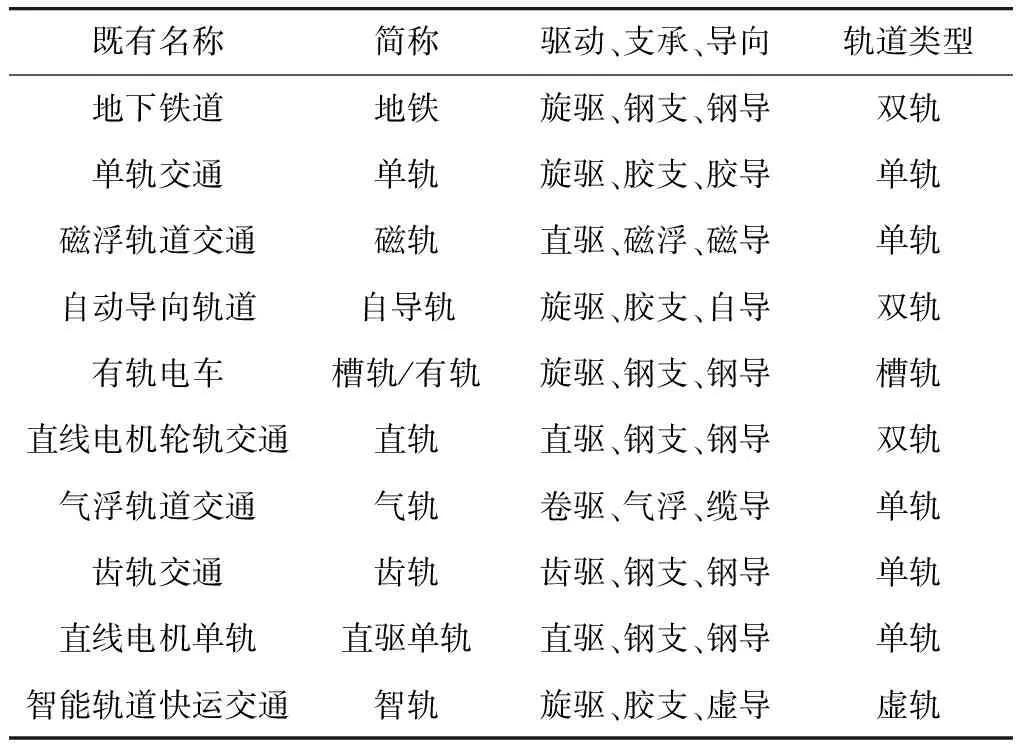
表5 基于技术原理的城市轨道交通简化命名表
(4) 本文所提出的10种简化命名代表的是目前应用最广泛的驱动、支承、导向方式和轨道类型,亦是公众了解最多的制式名称。建议以此为主体,在后续分类命名中,将新型城市轨道交通中与上述基础制式分类不同的驱动方式、支承方式、导向方式和轨道类型作为定语,以“定语+主体”的方式对城市轨道交通制式进行分类。例如,针对直线电机驱动的地铁,可将其命名为“直驱地铁”,这样即可以清晰地分辨出地铁与直驱地铁的不同。
4 结语
本文基于城市轨道交通系统的技术原理,建立了以驱动方式、支承方式、导向方式和轨道类型为指标的分类体系。该体系可涵盖城市轨道交通各种制式,具有综合程度高、分类规则明确等特点,同时兼顾内容表述精炼和制式特点突出的优势,可以长期指导城市轨道交通制式的选择方向,也便于专业工作人员及普通公众迅速区分各种城市轨道交通制式。
从城市轨道交通总体规划的长远发展角度来看,新的分类方法将有利于统筹各类城市轨道交通制式,有利于城市轨道交通多制式的综合协调发展,同时在推动科学、先进、合理、综合的城市轨道交通线网规划和提高统计的准确性方面具有促进作用,更适应于未来城市轨道交通多制式发展趋势。
