陆基远程和超远程无线电导航系统发展现状与趋势
2019-03-14甄卫民丁长春
甄卫民,丁长春
(中国电波传播研究所,山东 青岛 266107)
0 引言
定位导航授时(PNT)系统为世界各地的军事、商业和民用用户提供PNT服务,是现代社会正常运行必不可少的基础设施,直接关系到国家的战略利益.当前全球PNT系统极大地依赖于卫星导航系统,然而受空间环境和电磁环境的限制,当受到空间遮挡和电磁干扰时,卫星导航系统性能会显著下降甚至不可用,因此将卫星导航系统作为PNT系统的唯一手段极其危险.需要探索研究不依赖于卫星的具有强生存能力、高精度、低使用成本、操作方便灵活的PNT系统,将其作为卫星导航系统的有效补充和主要备份手段,这也是目前世界科技强国已经开展的工作.
自二次世界大战以来,世界上陆续出现了多种陆基无线电导航系统,如陆基超高频导航系统(TACAN等)、陆基甚高频导航系统(VOR等)、陆基低频远程导航系统(Loran)、陆基甚低频超远程导航系统(Omega)等.历经多代迭代,在应用中逐渐成熟,构建了几近覆盖陆、海、空全域的导航体系.本文重点介绍了陆基低频远程导航系统和甚低频超远程导航系统.
与卫星导航系统相比,基于陆基的无线电导航系统在区域覆盖、抗干扰、发播频率和功率等方面具有独特的优势,因此可以作为卫星导航系统的有效补充和主要备份手段.
自20世纪90年代,随着投入运行的卫星导航系统功能的日臻完善,卫星导航系统已经开始逐步取代陆基导航系统,并在导航、授时领域占据了一定的主导地位.陆基导航系统的发展在某种意义上遇到了严峻的挑战,导致其在某些应用领域己处于次要的地位.而今,高频电磁环境的日益复杂,卫星导航固有缺陷开始显现,陆基导航系统再次引起人们的关注.

图1 陆基无线电导航系统部署时间图
由图1可知,陆基低频远程无线电导航系统主要包括罗兰(Loran)系统、 恰卡(Chayka)系统; 陆基甚低频超远程无线电导航系统主要包括欧米伽(Omega)系统和阿尔法(Alpha)系统等.其中罗兰、恰卡、长河二号等是典型的提供区域覆盖的陆基远程无线电导航系统,最大导航距离可达1920~3200 km;欧米伽和阿尔法是典型的提供全球覆盖的陆基超远程无线电导航系统,最大导航距离超过10 000 km.
1 陆基远程无线电导航系统
1.1 罗兰导航系统
二次世界大战时期,出于军事需要,美国海军需要导航系统覆盖范围比以往任意一个时期都要广,罗兰导航系统应运而生[1].原始罗兰系统又称为罗兰A(Loran-A),其工作频率为1.75~1.95 MHz,设计有效作用距离为1120~2240 km,定位精度为800~1600 m.在罗兰A的基础上,根据应用需求,经过多次技术迭代更新,至20世纪60年代,形成罗兰C(Loran-C)无线电导航系统.
罗兰C无线电导航系统是一种远程精密无线电双曲线定位导航系统,工作频率为90~110 kHz.它最显著的特点是利用脉冲进行导航,可以在接收端分离地波和天波分量.由于在介质中不同传播方式的混合不会产生相位干扰,因此具有相对较高的定位精度.罗兰C最大作用距离为1920~3200 km,理论定位误差为100~460 m.
美国是罗兰导航系统的发源地,自1957年在美国本土建成第一个罗兰C台链起[2],如图2所示,美国先后又在全美境内建设了约29个发射台站,同时也在远东(如韩国)和西北欧(如英国、荷兰等国)建设了相应的台站.所建台链覆盖了美国本土、 加拿大东西海岸、中太平洋、西北太平洋、挪威海和阿拉斯加等区域.随着国际形势的变化,美国于1994年底退出了境外台站的管理,将其交付给所在国.

图2 美国本土罗兰C台站系统分布
2010年,奥巴马政府取消了对罗兰系统的投入,并停止了美国本土的罗兰C系统的发射,准备拆除罗兰C发射台.2013年,在美国海岸警卫队主导下,为了说服政府重新启用以前的罗兰C发射站,并在原有台站基础上安装增强罗兰系统,成立了强壮导航授时基金会(RNT).2014年4月1日,美国众议院通过了“2014年美国海岸警卫队授权法案”,要求停止对现有美国罗兰C基础设施的拆除.
1.2 增强罗兰及差分增强罗兰导航系统
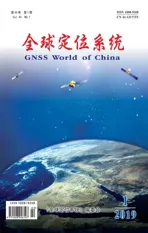
相比卫星导航系统,传统的罗兰C导航系统尚不能够满足定位精度和时间频率的需求,为此许多国家开展了罗兰C系统的现代化即增强罗兰系统(e-Loran)的研究.所谓增强罗兰系统,如图3所示,是指经过对现有的传统罗兰C系统进行现代化改造,使其比传统罗兰C拥有更高精度、更高可靠性和连续性,同时又能够保持现有罗兰C系统所有的功能,可以为用户提供高精度的时间频率基准参考[3].
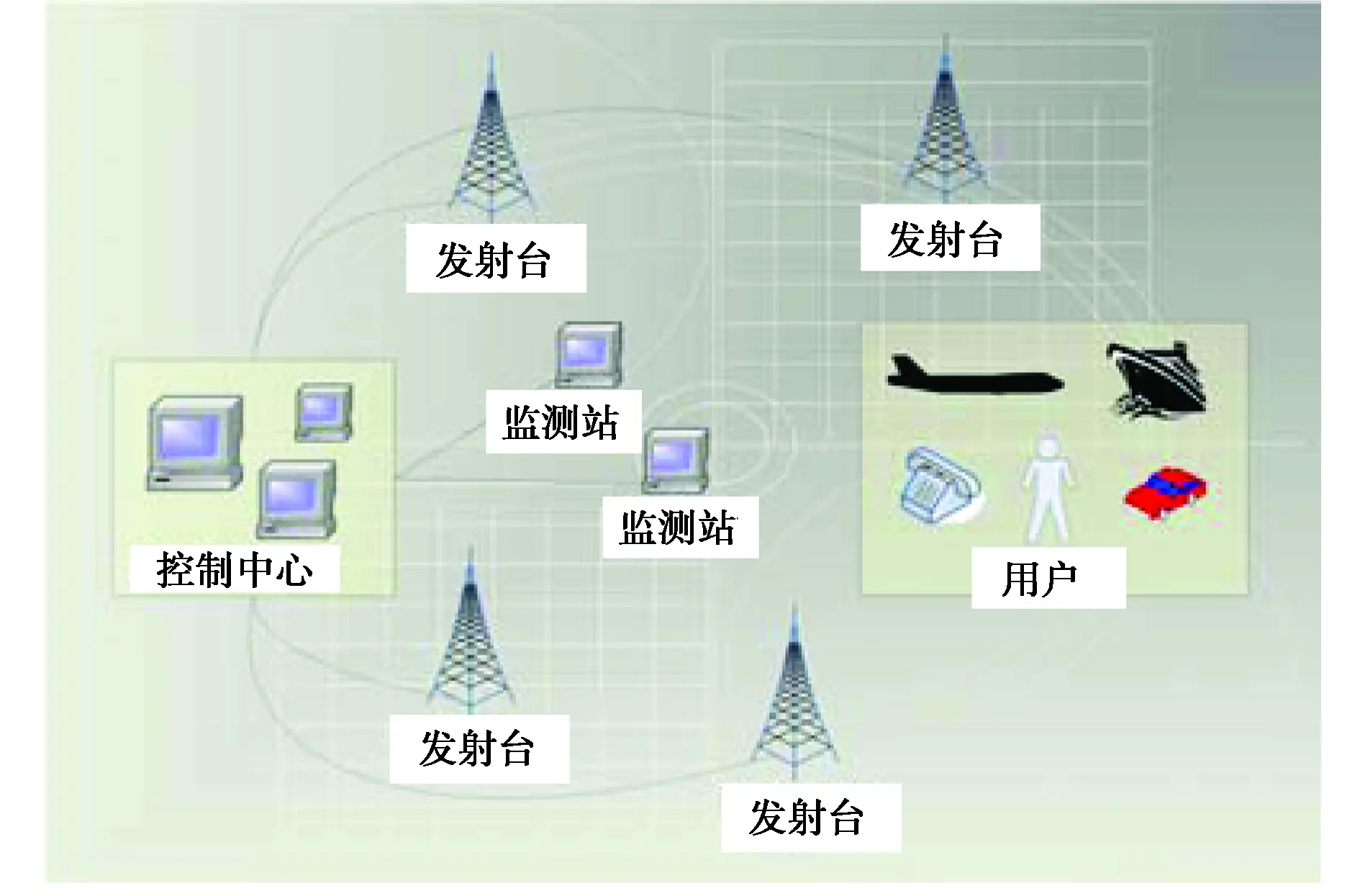
图3 增强罗兰导航系统组成示意图
增强罗兰系统包括发射台、控制中心、监测站和用户设备.发射台发射经过改造之后的罗兰C信号,将系统时间同步至UTC时间,同时具备守时功能,摆脱了对全球卫星导航系统(GNSS)的依赖.控制中心控制整个系统,完成系统故障的快速响应,无需工作人员值守.监测站完成传播信号的监测,并将监测信息实时传输至控制中心.用户设备接收发射台发射的信息,完成解算.
欧洲最早开展了在传统罗兰C发射系统中,通过增加脉冲位置调制(PPM),实现数据发播的研究和实践.如图4所示,1989年,荷兰代尔夫特科技大学的vanWilligen提出了Eurofix概念,并开展了相应技术的研究.1997年2月5日,代尔夫特科技大学在叙尔特罗兰C台站上完成了Eurofix技术试验,并取得了成功.2001年,基于Eurofix的脉冲位置调制方案,被国际电信联盟(ITU)通过建议书M.589-3实现了标准化[3].
(a)原始罗兰信号 (b)改造后罗兰信号图4 原始罗兰C信号及改造后信号
由于在欧洲测试取得了较好的效果,1997年11月,美国海岸警卫队与代尔夫特大学合作,在新泽西州的Wildwood台站发射机上安装了Eurofix系统,随后进行了传播测试,取得了与欧洲实验相同的效果.据英国《简氏防务周刊》2018年6月14日的报道,美国已经展开增强罗兰导航系统的研究,将其作为GPS的备份系统使用,并在韩国首先开始部署这套系统,计划在2019年建成3个“增强罗兰”系统的导航台.
相比于之前的罗兰C系统,增强罗兰对设备、信号和操作规程进行了升级,以提供更好的性能和更多的服务,增强罗兰系统的定位误差为10~20 m.但是一些特殊的应用场景,例如航海和航空的非精密进近和精密进近,要求定位精度在10 m以内,单纯采用增强罗兰信号依然不能够满足应用要求.为此荷兰Reelektronika公司展开了差分罗兰(eDLoran)技术的研究工作,并在2014年1月7日宣布,他们已经在荷兰建立了一套增强型差分罗兰系统.该系统在鹿特丹欧洲港口区进行了GPS导航与罗兰导航比对试验,达到了精度5 m(95%)的效果,可以用于舰船航行导航以及舰船进出港口.
差分罗兰系统由发射台、差分参考站、服务器、通信网络和用户组成,如图5所示,所有差分参考站的位置均精密已知,并实时将它们的测量数据发送到服务器.服务器则根据差分参考站的数据计算修正信息[4].因此服务器可以为差分覆盖区域用户提供最佳校正参数.用户和服务器之间通过LTE等通信网络进行数据交互,从而对当前定位解算信息进行校正,实现对当前航迹的修正,从而满足进出港的要求.

图5 差分罗兰工作示意图
测试轨迹如图6(a)所示,红色轨迹是没有使用差分罗兰系统定位的线路,蓝线是GPS-RTK实测的“真实”轨迹,白色的轨迹是差分罗兰系统定位图,将蓝色轨迹拓宽10 m,可以看出,白色轨迹与拓宽后的蓝色轨迹完全重合.从图6(b)可以看出,定位精度达到了5 m(95%)内的要求,可以用于舰船航行导航以及舰船进出港口.

(a)试验航迹 (b)测试结果图6 Reelektronika公司差分测试试验航迹及测试结果
1.3 其它陆基远程无线电导航系统
据俄罗斯《消息报》报道称,俄罗斯圣彼得堡无线电导航与时间研究所开发的新型“天蝎座”(Skorpion)系统,将于2020年前完成对俄罗斯现有“恰卡”地面无线电导航系统发射机网络的替代工作.与老式“恰卡”陆基无线电导航系统发射机相比,“天蝎座”可以覆盖更远距离、自动维护发射信号参数,抑制残余无线电脉冲,并可以通过单一控制台进行控制.接收机可在所有的军事系统中安装,通过与GLONASS同步确认位置数据.俄罗斯《消息报》报道称,“天蝎座”替代现有发射机网络的计划安排如下:整个贝加尔湖地区将于2015年末完成;北高加索地区于2016-2017年完成;远东地区于2017-2019年完成;南乌拉尔地区于2019-2020年完成.此外,莫斯科地区将会翻新并保留一些老式“恰卡”地面无线电导航系统较新的发射机.
我国自主的陆基远程无线电导航系统研究与建设始于20世纪60年代,与国际陆基无线电导航系统概念的研究同步进行,于1979年确定建设了“长河二号”导航系统.经过多年建设,长河二号系统初步具备了向我国相关沿海区域提供PNT服务的能力[6].
2 陆基超远程无线电导航系统
二次世界大战时期及战后,出于军事需求,国际上在研究陆基远程无线电导航系统的同时,也开展了陆基超远程无线电导航系统的研究工作.欧米伽(Omega)、阿尔法(Alpha)均是二战后期出现的典型的能够提供全球覆盖的超远程甚低频无线电导航系统.
2.1 欧米伽导航系统
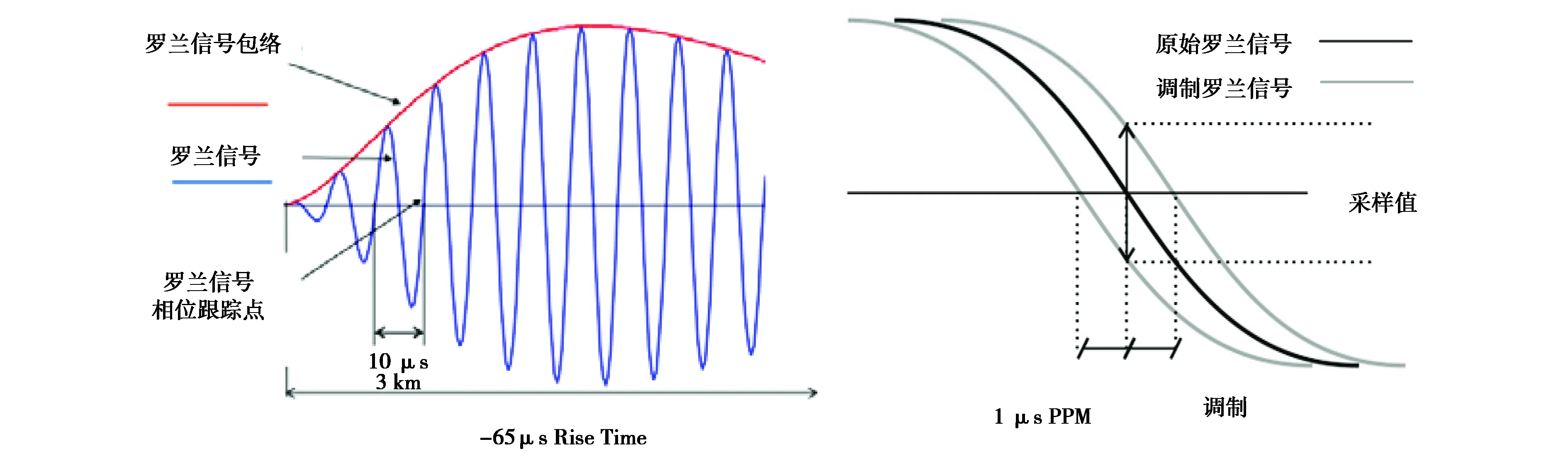
欧米伽系统是双曲线导航系统,其概念最初在1937年提出,1942年由英国工程师Dippy开始实施.从20世纪70年中期,欧米伽的运营电台开始广播导航信号.1982年,该系统完成了所有台站的部署,如图7所示.开始提供全球服务,是第一个真正的全球无线电导航系统,由美国与六个伙伴国家合作运营.欧米伽系统共计8个发射台,分别位于美国北达科它和夏威夷、挪威的乌兹卡朋(Utskarpen)、利比亚的蒙罗维亚(Monrovia)、法属留尼旺群岛(ReunionIsland)、阿根廷的德卫尔彻(Tehuelche)、澳大利亚的维多利亚(Victoria)和日本的对马岛(Tsushima).每个台站发射信号序列中都发射10.2 kHz、11.33 kHz、13.6 kHz、11.05 kHz的公共频点信号,除此之外再发射本台站特有频点的信号,发射周期为10 s.欧米伽导航主要用于为空中和海上航行提供持续的、中等精度的定位服务.其理论定位精度为2~4 n mile.虽然欧米伽系统最初目的并非用于陆地导航,但欧米伽系统已应用于许多陆地导航方面的传播应用.欧米伽接收机根据从三个或更多欧米伽站接收到的信号的相位,或通过选定的两对欧米伽站的信号之间的相位比较,从距离测量中确定位置.
欧米伽系统虽然覆盖面大,且具有一定的水下导航的功能,但是随着卫星导航等更先进、更精确的无线电导航系统的出现,欧米伽导航慢慢失去了其重要性,最终于1997年为了支持GNSS而关闭.
图7 欧米伽系统台站分布示意图[7]
2.2 STOIC计划
随着GNSS的广泛应用,其自身固有的缺陷不断暴露出来,高频段无线电电磁环境日益复杂,卫星无线电导航信号可能会遭受有意或无意的无线电干扰,使得GNSS在某些区域无法工作.2003年开始的伊拉克战争中,据称伊拉克使用了GPS干扰设备,对美军使用的“精确制导武器”进行干扰,对“战斧”巡航导弹等远距离长途奔袭的导弹影响最为严重,虽仅采用了少量的GPS干扰装置,仍造成联军多枚精确制导炸弹偏离了轨道.2011年12月4日,伊朗媒体称伊朗防空部队利用伪造的GPS信号对美国“RQ-170”无人侦察机进行欺骗,使其降落在伊朗东北部城市卡什马尔,并被俘获,而这架无人机误认为自己是降落在阿富汗基地.2018年,北约在距离俄罗斯西北境不远的北欧区域举行了大规模的“三叉戟节点-2018”军事演习.期间,芬兰和挪威声称GPS信号受到了俄罗斯北部地区长时间的故意干扰,并造成了挪威一艘“海尔格英斯塔”号宙斯盾护卫舰与一艘油轮发生冲撞,最终护卫舰被撞穿.同时,芬兰也声称该国周边地区的GPS信号不稳定,坐标不可靠,并将矛头指向俄罗斯.
早在1997年,美军正式提出“导航战”概念,并将其定义为:阻止敌方使用卫星导航信息,保证己方和盟友部队可以有效地利用卫星导航信息,同时不影响战区以外区域和平利用卫星导航信息.但是随着技术的发展,美军发现,卫星导航拒止技术发展迅猛,已经无法完全可靠地保证战场区域卫星导航信息的有效性和完好性.以上各个卫星导航被干扰的案例,使得美国政府迫切需要发展一种不依赖于卫星导航的陆基远程无线电导航系统.
2014年,美国国防高级研究计划局(DARPA)启动了竞争环境中的空间、时间和方向信息(STOIC)项目,旨在研发不依赖GPS但具有与GPS同级别精度的PNT系统,STOIC将在GPS性能退化或无法使用时提供抗干扰的PNT能力.该项目旨在寻求发展独立于GPS系统之外的定位、导航和定时的系统,且该系统具有与GPS系统相当的定时和定位精度.DARPA将以上系统的实现从技术层面分解为三方面:远程健壮的参考信号,极稳定的战术时钟以及为多用户提供PNT信息的多功能系统.2016年2月,STOIC项目在已有成果的基础上将后续的研究计划分解为两个阶段,提出借用现有的海军甚低频通信系统支撑后续的各个阶段的研究工作,每一个阶段研究时间预计需要12个月,研究重点主要是信号体制、信号传播、接收处理以及系统在机载和海上平台的应用.
2.3 阿尔法导航系统
阿尔法导航系统也是双曲线导航系统,其概念诞生于1957年,1962年该导航系统开始发射信号.1968年该系统位于克拉斯诺达尔(Krasnodar)、诺沃西比尔斯克(Novosibirsk)和共青城(Komsomolsk)的3个导航台开始正式运作,在诺沃西比尔斯克的阿尔法导航台作为主站(现在仍是).从阿尔法导航的基本原理可知,如果一个导航台不能工作的话,剩下的两个将不能独立完成导航任务,而且整个系统的可用性非常有限.为此,1991年,俄罗斯新建了两个发射台,一个位于俄罗斯境内Kola半岛靠近摩尔曼斯克(Murmansk),另一个在土库曼斯坦.建成后的阿尔法导航系统工作区覆盖全球70%的面积,几何盲区为东处中太平洋夏威夷与关岛之间一线和西处非洲大陆南大西洋一线,如图8所示.阿尔法导航系统是目前国际上唯一仍在正常运行的甚低频(VLF)陆基超远程导航系统.

图8 阿尔法系统台站分布示意图[7]
中国电波传播研究所作为中国专门从事电波环境特性观测和应用技术研究的国家级专业研究所,基于对电波传播特性研究的需要,长期对俄罗斯阿尔法系统信号进行观测.根据中国电波传播研究所的观测,2018年5月阿尔法系统所有导航台站均停止发射信号,12月开始恢复其中一个台站(图8中副台站)的发射工作,并进行相应的测试,预计后续其余台站将会陆续恢复工作.据推测,在长达七个半月停止发射过程中,阿尔法系统不仅仅是检测维修,同时也对其台站设备进行了升级改造.
3 发展建议
PNT系统是现代社会正常运行必不可少的基础设施.采用星基与陆基等多种方式相结合的多源导航系统,PNT系统的可用性、完好性和可靠性都会得到显著提升.因此,在发展我国北斗卫星导航系统(BDS)的同时,需要大力发展陆基无线电导航系统,形成多源的完备的国家综合PNT体系,有利于国家安全和地位的提升[8].