基于PXIe总线架构的GPS导航信号模拟源设计及实现
2019-03-14刘德智陈晨李建文潘林张伦东
刘德智,陈晨,李建文,潘林,张伦东
(信息工程大学 地理空间信息学院,河南 郑州 450001)
0 引 言
卫星导航信号模拟源可以根据载体的运动特性,精确地控制信号的各项误差,生成实际环境中接收机接收到的导航信号,从而可在实验室等室内环境中对用户终端设备进行测试、评估或对设备进行检测[1].卫星导航信号模拟源仿真生成的信号具有可控性、可重复性,且不受外部环境的影响,可以极大地减少现场测试所带来的高昂费用以及时耗,极大地提高导航终端产品的测试效率[2],因此,一直备受军事和工业部门的关注[3].
最早研制的卫星导航信号模拟源以模拟技术为主,采用射频合成的技术方案,把每颗卫星的信号独立调制到射频后再进行信号合成[4],该方法产生的导航信号,精度和通道一致性较差;随后出现的模拟中频合成技术中由于每个卫星通道都需要一个单独的中频载波产生模块,因此最终生成的信号会存在通道间偏差的问题[5].
随着数字技术的发展,数字芯片如数字信号处理(DSP)和现场可编程门阵列(FPGA)的功能越来越强大,基于数字技术的模拟源逐渐流行起来.目前大部分模拟源均不同程度地采用了大规模DSP/FPGA技术,在数字域进行信号的合成,再把多颗卫星的数字合成信号用一个射频通道输出,以提高信号精度和通道间的一致性[6].其中,数字中频合成技术是将多颗卫星的数字中频信号在数字域合成后,经数/模转换、上变频、滤波和功率控制后输出射频信号.该技术中数控振荡器(NCO)的使用可使模拟源的频率分辨率和准确度更高,但同时也有更高的杂散[7],且伪码初始相位的控制精度受到NCO工作时钟频率限制,码NCO的相位截断效应会产生相位抖动问题[8];而数字基带合成技术则将多颗卫星生成的零中频的数字基带信号,在数字域进行合成后,经直接正交上变频、滤波和功率控制后产生所期望的射频信号,该方法可以解决NCO的相位抖动问题,实现伪码初始相位的精确控制,保证系统通道一致性及零值稳定性[9].
鉴于以上因素,本文引入了基于PXIe总线的软件无线电架构[10],设计并实现了采用数字基带合成技术的软硬件结合的GPS导航信号模拟源.该模拟源采用数字基带合成技术,在上位机数学仿真软件中产生数字基带合成信号,经硬件直接正交上变频、滤波和功率控制后输出GPS射频信号.其中,上位机数学仿真软件采用图形化编程语言LABVIEW进行开发,操作简单且能够多线程并行,开发效率高;硬件选用NI公司PXIe总线结构的模块化设备,实现简单,兼容性、扩展性、可控性好,便于模拟源的后期维护和升级.
1 GPS信号结构和信号模型
1.1 GPS信号结构
GPS信号由测距码、导航电文和载波三个分量组成.GPS卫星在产生导航信号时,首先将导航电文和测距码进行直接序列扩频调制(DSSS),再用扩频调制后的数据码对载波进行调制,得到最终的发射信号.
1.1.1 测距码
GPS L1载波上同时调制有C/A码和P(Y)码,L2载波上调制有P(Y)码,但是P(Y)码经过加密,只有授权用户才能使用,因此本文主要研究公开的C/A码信号.
C/A码是由两个周期性的二进制序列G1和G2进行模二相加后形成的平衡Gold码,码速率为1.023 Mbps,码长为1 023 bit,周期为1 ms.G1和G2序列各由一个10级移位寄存器产生,寄存器初始状态均置为1,每个周期含有1 023个码元,G1和G2序列的生成多项式为
G1(X)=1+X3+X10,
(1)
G2(X)=1+X2+X3+X6+X8+X9+X10.
(2)
C/A码发生器如图1所示.G1序列由第十级移位寄存器输出,而G2序列由相位选择器选择两个不同的寄存器抽头进行模二相加产生,不同的卫星对应不同的寄存器抽头;然后将得到的G1序列与G2序列模二相加生成C/A码.每个卫星所生成的C/A码皆不相同,且相互正交.
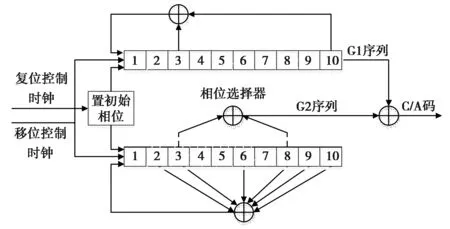
图1 C/A码发生器示意图
1.1.2 导航电文
导航电文是卫星向用户播发的一组反映卫星在空间的运行轨道、卫星钟的改正参数、电离层延迟修正参数及卫星的工作状态等信息的二进制代码,又称数据码(D码)[11].GPS导航电文以“帧”为基本单位,其帧结构如图2所示.每个主帧包含5个子帧,共1 500 bit;每个子帧包含10个字,共300 bit;每个字包含30bit.GPS导航电文播发速率为50 bps,所以每个比特持续0.02 s,每个字持续0.6 s,每个子帧持续6 s,每个主帧持续30 s.子帧4和子帧5各有25个不同的页面,每30 s翻转一页,而前3个子帧则重复原来的内容,所以完整的导航电文包含25个主帧,共37 500 bit,持续时间为12.5 min.子帧1主要播发卫星钟的改正数及其数据龄期,子帧2、3主要播发卫星星历信息,子帧4、5主要播发卫星历书信息,子帧1、2、3的内容每小时更新一次,子帧4、5的内容则要等卫星注入新的历书数据后才更换.

图2 GPS导航电文结构
1.2 GPS信号模型[3]
假设第j颗GPS卫星发射信号的时刻为t,则该卫星发射的射频信号中L1 C/A信号的数学表达式为:
Sj(t)=AjCj(t)Dj(t)Dj(t)cos(2πfL1t+φj0),
(3)
式中:Aj为射频信号幅度;Cj为进行扩频调制的伪随机序列C/A码;Dj为导航电文,即数据码;fL1为L1载波频率;φj0为载波初始相位.
卫星发射的导航信号经过一定时间的空间传播后,到达接收机射频前端电路,再由接收机进行捕获、跟踪并进行定位解算.由于卫星和用户间的相对运动、传输功率衰减、电离层、对流层、多路径、卫星时钟、天线以及其他噪声和干扰的影响,信号将发生功率、频率、相位、时延等参数的改变,其信号模型可以表示为:

(4)

一般来说,模拟源可以仿真产生多颗卫星的导航信号,所以卫星导航信号模拟源产生的信号模型为

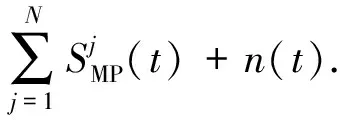
(5)
式中:S(t)为模拟源生成的多颗卫星的合成信号;N为模拟的卫星数,其他参数含义如前所述.
2 模拟源硬件构成
面向仪器系统的PCI扩展(PXI)是一种由美国国家仪器公司发布的基于PC的测量和自动化平台,其结合了PCI总线的高吞吐量、低延时与CompactPCI的模块化坚固封装形式.PXI采用模块化的架构,可根据系统的具体要求选择不同的模块化仪器,便于系统的维护和升级.PXI系统由机箱、系统控制器和外设模块三个基本部分组成.PXI Express 是PXI的改进和升级,其融入了PCI Express的特点,采用串行传输,点到点的总线拓扑结构,将PXI中可用带宽提高了45倍多,即从132 MB/s提高到6 GB/s;不同于PXI在所有总线设备间分享带宽,PXI Express为每一个设备提供单独的传输通道;同时它所增加的时钟和同步触发信号以及拥有特殊的接口物理特性使得其在测量、通信、工业自动化等领域拥有更大的技术优势.
本文设计并实现了基于PXIe总线架构的GPS导航信号模拟源,该模拟源由NI PXIe-1075机箱[12]、NI PXIe-8135嵌入式控制器[13]、NI PXIe-5673E矢量信号发生器[14]和NI HDD-8265大容量存储模块[15]构成,各模块通过机箱中的背板总线相连,如图3所示.
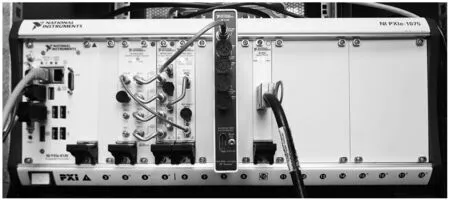
图3 PXI架构的模拟源实物图
NI PXIe-1075机箱具有PCI Express带宽特性,该机箱包含18个插槽,每个插槽高达1 GB/s的可用带宽和4 GB/s的系统总带宽.NI PXIe-8135高性能嵌入式控制器与PXI Express兼容机箱(如PXIe-1075)结合在一起,可实现一个完全兼容PC的计算机,结构紧凑,坚固耐用.NI HDD-8265大容量存储模块是一个750 MB/s磁盘阵列,可支持PXI数据流系统的持续数据流盘速率.
NI PXIe-5673E是一款高带宽的6.6 GHz的射频矢量信号发生器模块,瞬时带宽高达100 MHz,该模块由NI PXIe-5450任意波形发生器模块、NI PXIe-5611 I/Q矢量调制模块和NI PXIe-5652本地振荡器模块通过SMA通信电缆连接合成的模块化设备,各模块间的连接关系如图4所示.
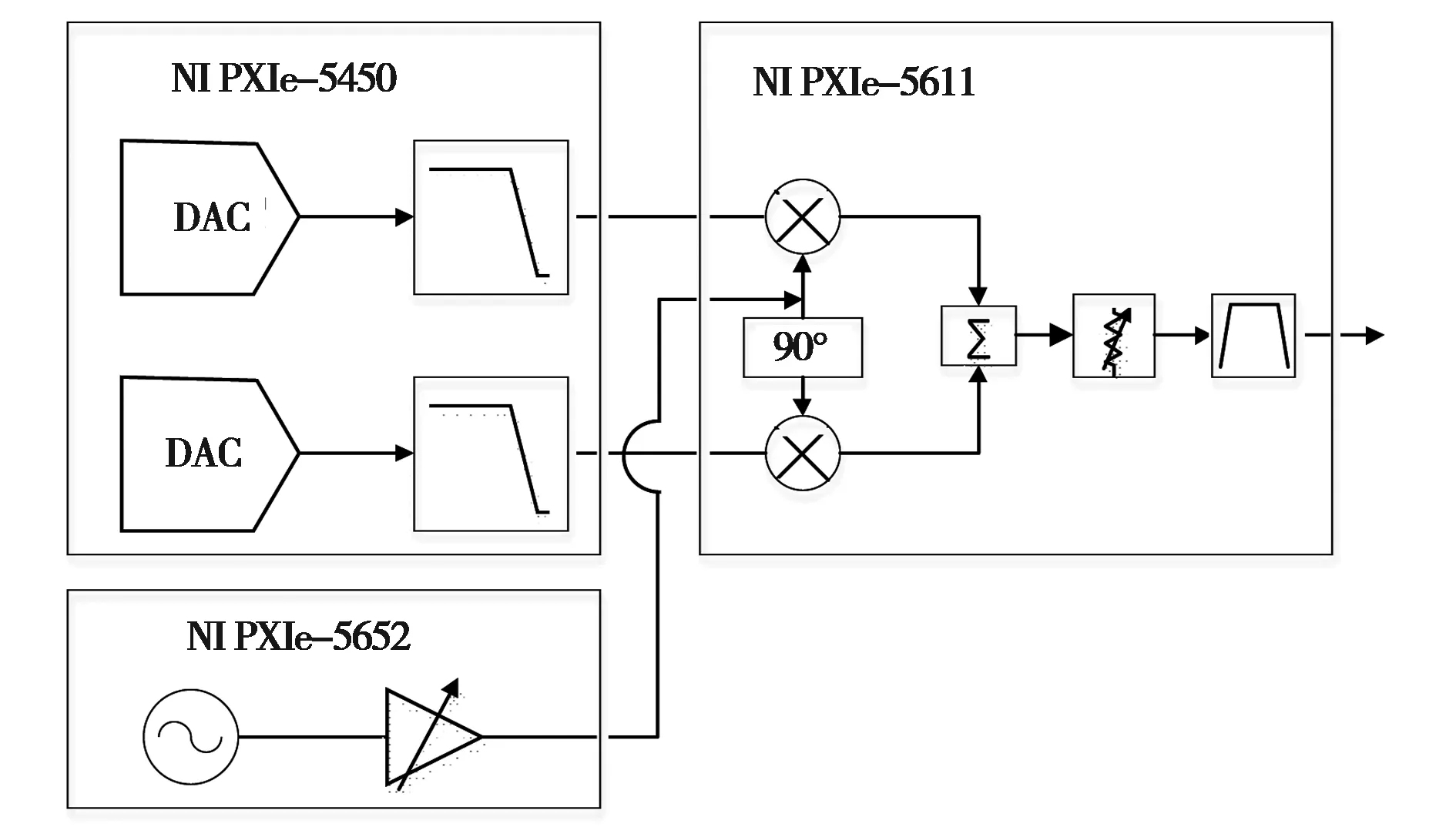
图4 NI PXIe-5673E射频矢量信号发生器结构框图
其中NI PXIe-5450任意波形发生器(AWG)模块将上位机产生的数字基带合成信号经过数/模转换,生成I、Q两路模拟基带信号;NI PXIe-5652本地振荡器(LO)模块产生GPS信号调制所需频率的射频载波信号;NI PXIe-5611 I/Q矢量调制模块是射频矢量信号发生器的核心模块,其将AWG模块产生的I、Q两路模拟基带信号和LO模块产生的本振信号经信号调理电路后进行直接正交上变频调制,上变频到所需的射频频率;再经射频滤波和功率控制后输出所期望的射频导航信号.I/Q矢量调制器的内部框图如图5所示.

图5 NI PXIe-5611矢量调制器内部框图
3 模拟源系统设计
GPS导航信号模拟源由数学仿真子系统和射频信号生成子系统两部分组成,其中,数学仿真子系统在上位机中编程实现,包括卫星轨道仿真,空间环境误差仿真,多普勒频移仿真以及接收机运动轨迹仿真,其产生零中频的数字基带信号,然后采用数字基带合成技术,生成多颗卫星的数字基带合成信号;射频信号生成子系统则负责接收并处理上位机产生的数字基带合成信号,经直接正交上变频调制,滤波和功率控制后,最终产生用户终端设备能够接收的GPS射频导航信号.GPS导航信号模拟源的具体仿真流程如图6所示.

图6 模拟源仿真流程图
4 模拟源验证
4.1 信号频谱测试
将频谱分析仪连接至GPS导航信号模拟源的射频输出端口,观察输出信号的频谱.
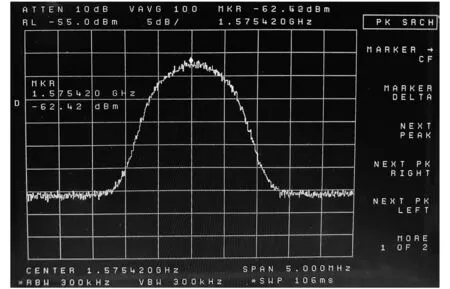
图7 GPS仿真信号频谱图
由图7可知,模拟源仿真产生的GPS信号,其中心频率在1575.42 MHz左右,主瓣带宽约为2 MHz,与GPS中心频率理论值1575.42 MHz和GPS带宽理论值2.046 MHz相吻合,从而说明模拟源仿真信号的正确性.
4.2 静态定位测试
静态定位测试中,本文选择2018年9月20日(即年积日第263天)的广播星历文件和历书文件,设置仿真开始时间为2018年9月20日0时(GPS时),仿真起始位置为30°N,120°E,海拔为2 000 m,接收机为静止状态.使用司南M300 Pro接收机对模拟源静态场景下的仿真信号进行验证,定位结果如图8所示.

图8 接收机静态定位结果
根据接收机的定位结果及模拟源设定的仿真位置,计算出接收机在WGS坐标系下X、Y、Z三轴定位误差.本文选择第10—25 min的数据进行计算分析,计算结果如图9所示.
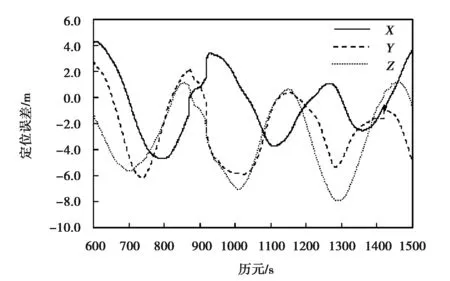
图9 静态测试X、Y、Z三轴定位误差
由图9可以看出,X、Y、Z三轴定位误差均在8 m以内,且除了Z轴的少部分历元外,X、Y、Z三轴的定位误差均在6 m以内,从而说明模拟源仿真信号的准确性及有效性.
为了更好地比较静态定位测试中X、Y、Z三轴定位误差,本文统计了仿真时间内(第10~25 min)接收机定位误差的均值及标准差,结果如表1所示.

表1 GPS仿真信号静态定位结果
根据表1可得,X轴定位误差的均值明显小于Y轴和Z轴,为-0.494 3 m,说明X轴的平均定位结果非常接近理论值;X、Y、Z轴定位误差的标准差相近,均在2.5 m左右,说明三轴的定位结果相对于理论值的离散度相同.
4.3 动态定位测试
动态定位测试中设置接收机为匀速直线运动,模拟车辆等物体的匀速直线运动情况.设置仿真开始时间为2018年9月20日0时(GPS时),仿真起始位置为30°N,120°E,海拔2 000 m,仿真速度为北向速度Vn=6 m/s,东向速度Ve=8 m/s,天向速度Vu=0 m/s.动态定位测试结果如图10~12所示.

图10 接收机动态定位结果

图11 卫星载噪比图
由图11可以看出,可视卫星G7、G11、G18、G19、G22、G28的载噪比值均在50 dB/Hz左右,说明模拟源仿真信号质量较好.
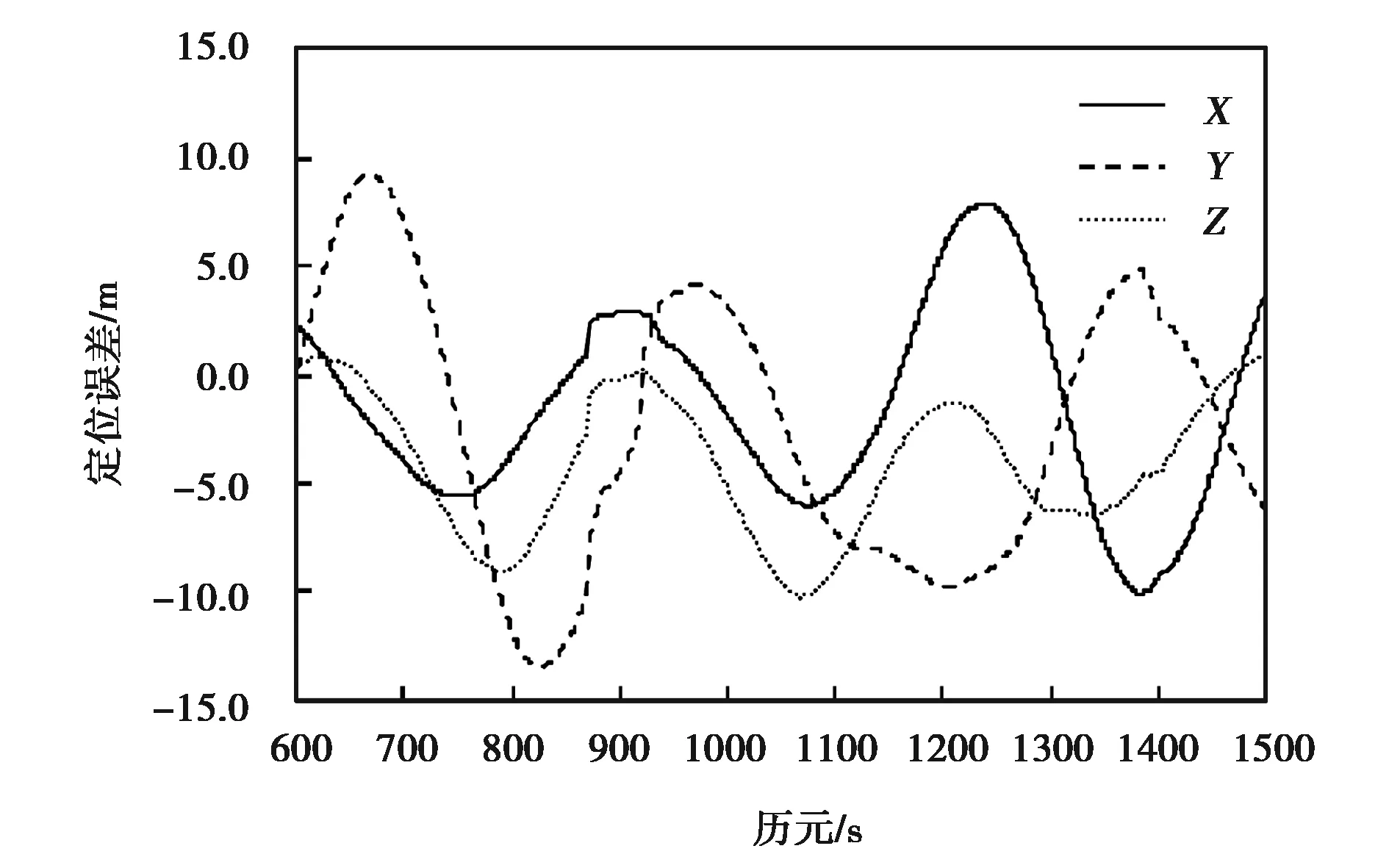
图12 动态测试X、Y、Z三轴定位误差
由图12可以看出,动态测试中X、Y、Z三轴定位误差均在15 m以内,且除了Y轴的部分历元外,X、Y、Z三轴的定位误差均在10 m以内.动态测试中三轴定位误差比静态测试中三轴定位误差值更大,但仍在误差范围值之内,说明模拟源能实现动态信号的仿真且接收机能够捕获、跟踪其产生的仿真信号并实现定位解算.
为了比较动态测试中X、Y、Z三轴定位误差,本文统计了仿真时间内(第10~25 min)接收机定位误差的均值及标准差,统计结果如表2所示.
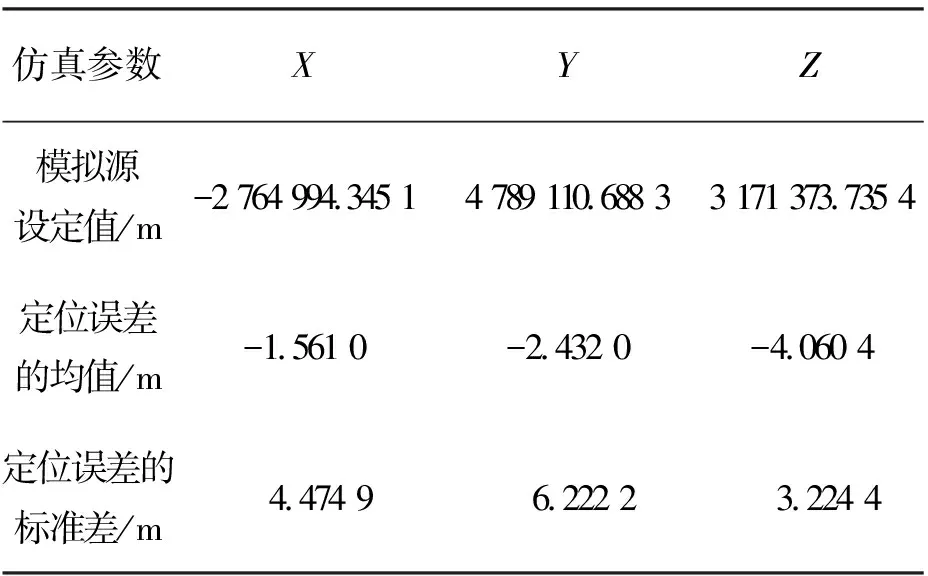
表2 GPS仿真信号动态定位结果
由表2可以看出,动态测试结果与静态测试结果相似,X轴定位误差的均值小于Y轴和Z轴定位误差的均值,其值在1.5 m左右,Z轴定位误差的均值最大,其值在4 m左右;但Y轴定位误差标准差大于X轴和Z轴,说明Y轴的定位结果相对于理论值的离散度更大.
5 结束语
本文采用PXIe总线技术的无线电思想,设计并实现了PXI架构的GPS导航信号模拟源,该模拟源使用图形化编程语言LABVIEW开发上位机数学仿真软件,并采用数字基带合成技术,在数字域生成多颗卫星的数字基带合成信号;再使用NI模块化设备经直接正交上变频、滤波和功率控制后,最终产生用户终端设备可以接收的GPS射频导航信号.经频谱分析仪的信号频谱测试和商用接收机的静态、动态测试验证,表明了模拟源仿真信号的正确性及有效性.GPS导航信号模拟源的成功研制,将为下一步研制北斗二号、北斗三号导航信号模拟源提供一定的借鉴经验.
致谢:感谢全球连续监测评估系统iGMAS信息工程大学分析中心(LSN)给予的帮助和支持.