三维激光扫描移动测量在铁路运营中的应用
2019-03-13周玉辉
周玉辉
(中铁二院工程集团有限责任公司, 成都 610031)
铁路运输是我国目前客运、货运主要的运输方式。截至2017年底,我国铁路营业里程已达12.7×104km,其中高速铁路2.5×104km。根据2016年修编的《中长期铁路网规划》,到2025年,我国高速铁路通车里程将达到3.8×104km,并形成“八纵八横”的高速铁路网[1]。随着大量新建高速铁路的施工及投入运营一些线路病害逐渐显现出来,如隧道底板隆起、隧道变形、路基沉降、桥梁位移等。因此,在一定周期内需对高速铁路施工现场或运营线路进行快速、长期的监测,如何在有限的人力、物力资源条件下提高测量技术水平,提高工作效率、确保工程质量就显得十分必要。
基于此,中铁二院开展了基于惯导三维激光扫描移动测量系统在铁路工程上的应用研究。研究表明:①采用三维激光移动扫描可快速获取施工周围环境及运营线路高密度、高精度的点云数据,在高速铁路施工中可进行构筑物的变形监测[2-3]。②随着车载移动测量在公路、市政工程及城市管理上应用的逐渐普及并取得了一定的进展,三维激光扫描测量技术应用在铁路工程及运营管理上成为可能。③随着移动测量设备完善及精度的提高,在铺轨后可采用三维激光扫描移动测量系统快速进行隧道、桥梁及路基的监测及运营维护管理,为高速铁路施工及运营维护提供了一种高效率、高精度的测量手段。
1 三维激光扫描移动测量系统
基于惯导的三维激光扫描移动测量系统采用三维激光扫描技术、GPS/IMU组合导航(POS)定位定姿技术、多传感器集成移动测量技术等进行系统集成,以列车、汽车或轨道小车为载体,进行快速三维激光扫描,获取施工现场、运营铁路轨道及附属设施的高精度点云数据,通过一系列的后处理运算后,得到更加精确、有效、完整的施工现场构筑物及运营铁路的相关信息。
1.1 三维激光扫描移动测量系统组成
铁路三维激光扫描移动测量系统以列车或轨道小车作为测量平台,系统共分为4个主要控制系统单元。
(1)电源管理单元:对整套系统进行供电及相应的电路保护,从而保证系统的正常工作。
(2)同步控制单元:通过电路控制将所有传感器进行同步数据采集,并将采集到的相关数据上传至存储系统中。
(3)数据采集单元:利用三维激光扫描、GPS/IMU组合导航(POS)定位定姿等技术获取铁路工程各种构筑物的各种相关信息,主要包括点云数据、全景影像、空间位置和姿态信息等。
(4)软件处理单元:针对采集回来的数据进行分析,包括平面坐标以及高程系统的处理分析。对于平面坐标,采用常规高程面模型投影解算出的点云必须经过适当的平移,才能转换到轨道高程投影模型下,进而最大限度控制投影带来的长度变形;高程系统基于的则是水准高系统,通过一定的算法将实测的大地高转换成水准高,得到高精度的点云成果数据并可快速浏览[4]。
测量系统集成如图1所示。

图1 系统集成框架图
1.2 三维激光扫描移动测量的技术优势
(1)三维激光扫描移动测量是基于三维激光扫描、惯性测量与GNSS定位技术的轨道高精度三维激光点云和高分辨率全景影响数据采集设备。
(2)系统将控制网坐标动态传递到POS测量系统,采用联合解算方法,满足弱GPS信号甚至无GPS情况下绝对测量精度的提高,实现高速铁路轨道快速、自动、连续、无缝、高精度定位定姿测量。
(3)通过点云数据可以提取既有线中线里程、中线坐标、轨面高程、路基断面、地形地物点资料。
(4)利用360°全景影像及点云效果图的真实、可视化优势,进行既有线路的路基病害、线路设施、跨线净空资料调查[5],提高既有线勘测与调绘的准确性、完整性。
(5)采用三维激光扫描移动测量技术改进了铁路既有线现状测量方法;减少作业流程及时间,提高了作业效率;减少与运营列车的相互干扰,确保测量人员、设备及运营的安全。
2 高速铁路轨道数据测量
2.1 测试过程
重庆至贵阳高速铁路(简称渝黔高铁),从重庆站引出,经綦江、桐梓、遵义、息烽,终点至贵阳北站,线路全长347 km,设计速度250 km/h。渝黔线设计施工过程已沿线建立了完备CPO、CPⅠ、CPⅠ及CPⅢ平面高程控制网,测试时采用渝黔线高精度CPⅡ控制点作为基站主控点,CPⅢ作为平面高程加密约束点,CPⅢ约束点在铁路两侧布置,点间距离约60 m,布置在路基、桥梁、隧道两侧[6]。
为了保证CPⅢ控制点顺利融入系统,特别设计了专用靶标实现CPⅢ约束点数据采集。
(1)利用施工加密CPⅡ点作为基站约束控制点。CPⅡ约束点坐标高程资料如表1所示。

表1 CPⅡ约束点坐标高程表
(2)充分利用沿线已有CPⅡ及CPⅢ控制网进行靶标布设,CPⅡ控制点作为基站,CPⅢ控制网按照60 m左右间隔在铁路两侧布设成对靶标,相邻两个靶标布设在铁路的不同侧。靶标可以沿CPⅢ控制网依次不间断进行布设,后续为测试不同靶标密度(间距)对精度的影响再选取不同密度的靶标进行融合解算。
2.1.2 现场数据采集
本次测试同步进行标靶布设和现场数据采集,标靶布设需要配备4人(分2组进行靶标安装和拆卸传递),移动测量系统仪器操作员1人。CPⅢ约束点布置及数据采集如图2所示。

图2 数据采集
2.2 扫描数据处理
外业现场扫描完成后,立即实施内业数据处理,并对数据处理过程中的关键指标进行了质量控制。
(1)航迹解算
扫描完成后,利用车载激光扫描仪上的GPS数据与同步的地面基站数据进行差分,联合高精度激光惯导及里程编码器数据融合解算出高精度的航迹文件。
加强行政监管。坚持“专人包片、领导督办”,强化农村饮水安全督导检查考核机制,以督查促进整改,以考核倒逼加压,确保各项工作真落地、见实效。2017年,重点对脱贫县和深度贫困县开展了联合督察,对全省进行了考核评估。今年8月,对43个未脱贫县开展农村饮水安全督导检查。
(2)设备自检校
自检校过程主要包括设备系统标定,内部设备精度检校。
(3)激光雷达数据融合纠偏解算
完成以上工作后,即可进行数据解算,融合得到初步激光雷达数据。之后利用现场采集到的控制点进行点云高程改正,得到最终点云数据。
2.3 基于控制点约束校正的精度改善试验与分析
为提高三维激光扫描移动测量系统获取的三维激光点云数据的精度,探索利用铁路控制网(CPⅡ、CPⅢ)进行激光点云精度改正需要的控制点的密度,根据靶标间距不同的2段,分别进行了精度改善实验对比分析。
2.3.1 平面高程约束点精度统计
(1)间距为800 m的CPⅢ点作为约束点,其他CPⅢ点作为验证点的精度统计。精度验证报告如表2所示。
由表2可知,当采用间距为800 m的CPⅡ作为约束点时,其大部分测试点的精度均<1 cm,个别单点平面高程精度<2 cm;,但其平面及高程标准差均<1 cm,满足既有普速铁路快速高精度检测与测量的精度要求[7]。
(2)将测段内所有CPⅢ点作为约束点,其精度验证报告如表3所示。
由表3可知,在测段范围内,将所有CPⅢ点作为约束点时,其单点平面精度<1 cm;其高程精度<1 cm,满足高速铁路工程测量规范的精度要求[6]。
2.3.2 轨面高程提取精度统计
在测段范围内,采用电子水准仪对轨面高程进行水准测量,与采用不同CPⅢ间距约束点计算提取的轨面高程进行对比,其轨面高程对比精度报告如表4所示。
由表4可知,约束点的精度越高,点云数据精度越高,在一般既有线上测量时,若没有CPⅢ点,可以用既有线外移桩点作为约束点进行融合约束计算,其成果资料满足铁路既有线测量“既有钢轨面高程检测限差不应大于20 mm”的要求[7]。
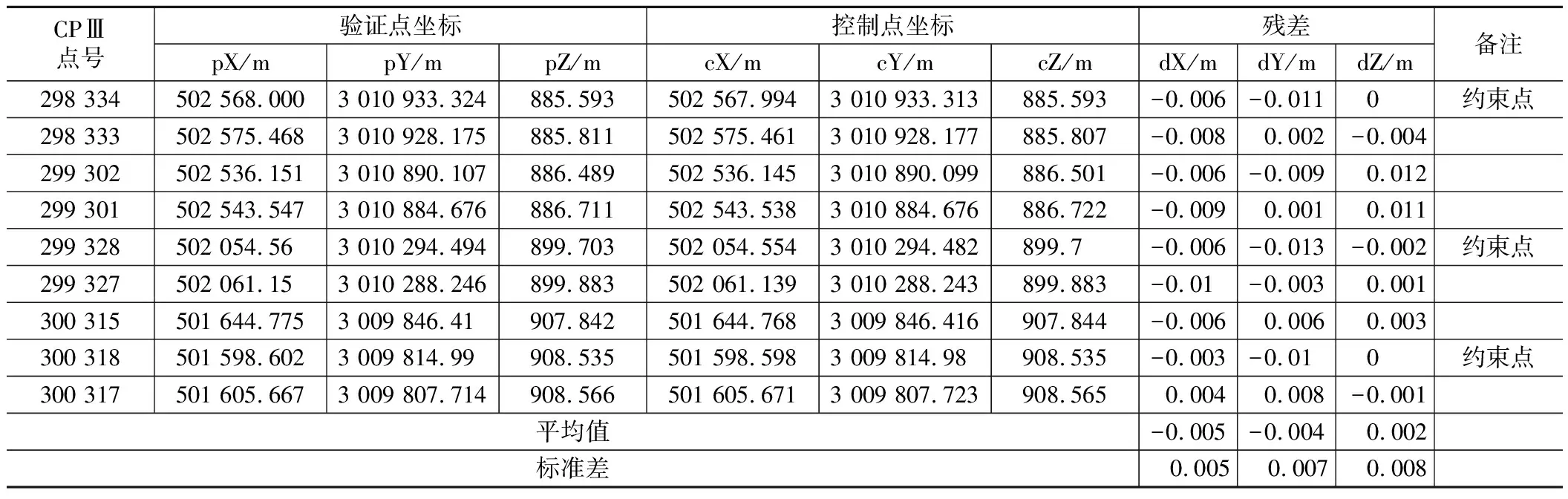
表2 渝黔线约束点精度验证报告

表3 渝黔线约束点精度验证报告

表4 渝黔线轨面高程精度报告
3 铁路大修轨道数据测量
3.1 项目简介
(1)项目概况:该项目是成都铁路局成都工务段年度大修任务,由中铁二院测绘院、工务段联合作业,采用移动式三维激光测量系统进行既有线现状测量工作,取得了良好的效果。
(2)项目地点:成都市青白江区、广汉市、彭州市。
(3)项目范围:由青白江区至彭县段约32 km的既有线三维扫描生产。
3.2 约束点布置
(1)全段主控点4个,所有约束点平面采用四等GPS静态测量,高程采用四等水准测量,并尽量与成九线的平面高程控制点联测。
(2)在K 0+000~K 32+000段,沿线路两侧分别布置平面高程约束点;点间距离500 m左右,一侧编号为GP-*作为靶标约束点,另外一侧编号为TP-*作为桩面约束点(不架设标靶)。
(3)约束点尽量在桥涵帽石上标注(并刻+丝),也可采用木质方桩(中心钉钢钉,方桩宜高出地面5 cm,便于扫描)。
(4)在布置约束点时确保扫描仪能够清晰扫描到约束点,约束点周围应用红白油漆相间涂抹。约束点布置如图3所示。

图3 约束点布置
3.3 数据采集
(1)K 0+000~K 32+000段,由测量人员进行中线里程测量(在钢轨上标注)及轨面高程测量(左右轨分别测量),测量数据作为对比数据使用。
(2)从青白江车站,以列车为载体,将移动扫描设备固定在列车头部,以30 km/h的速度进行数据移动扫描采集,移动扫描数据采集如图4所示。

图4 现场数据采集
3.4 数据处理
3.4.1 点云数据处理
外业现场扫描完成后,立即实施内业数据处理,并对数据处理过程中的关键指标进行了质量控制。扫描完成后,立即进行内业数据处理,并对数据处理过程中的关键指标进行了质量控制。
(1) 航迹解算
扫描完成后,利用车载激光扫描仪上的GPS数据与同步的地面基站数据进行差分,解算出高精度的航迹文件。
(2)设备自检校
自检校过程主要包括设备系统标定,内部设备精度检校。
(3)激光雷达数据融合纠偏解算
完成以上工作后,即可进行数据解算,融合得到初步激光雷达数据。之后利用现场采集到的控制点进行点云高程改正,得到最终点云数据。
3.4.2 约束点平面高程精度
采用约束点约束融合计算后,再次提取各个约束点的平面坐标及高程精度验证报告,如表5所示。
3.4.3 里程中心线的准确提取
确定起点里程K 0+000的平面坐标,计算起点里程对于铁路来说是最为重要的一个参数指标,后续所有的输出成果均是基于此里程。需要通过软件将车行轨迹准确快速的提取出来,并进行编辑和修正。
3.5 大修设计测量资料
应成都铁路局工务检测所要求,通过对高精度点云数据提取以下资料:(1)左右线轨面高程表;(2)中心线坐标表(计算拨距);(3)平面高程控制点资料。
4 在铁路上的应用
4.1 在施工阶段的应用
(1)随着CCD传感技术、视频压缩技术、图像处理等技术的发展,计算机视频测量技术越来越多地应用于隧道限界检测领域,限界检测正在向更高速度、更高精度发展,利用高精度点云数提取隧道及其他构筑物的特征点实现变形监测,通过2次扫描点云数据,提取隧道及其他构筑物的特征点数据,进行对比,判释隧道及其他构筑物是否变形或发生位移[3]。隧道变形监测立面点布置如图5所示。

图5 隧道结构立面监测点布置图
可根据不同时间段扫描的点云数据差值,开展隧道的监测,可以根据这些差值进行构筑物的平面位移、沉降值计算、隧道收敛值计算等。
(2)在施工过程中,可利用车载移动扫描设备,多路基面、路基边坡及沉降观测标志等其他构筑物进行移动扫描,根据点云数据,提取路基面高程,评价施工是否满足设计要求;提取路基沉降观测点,评判路基沉降参数。
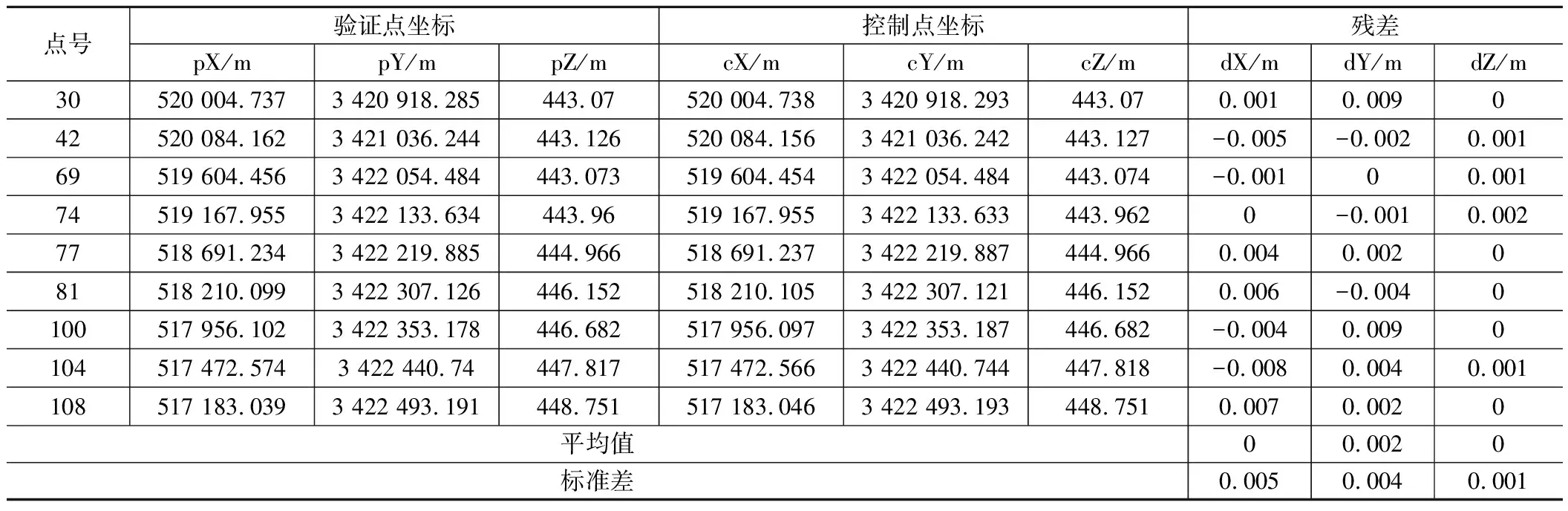
表5 精度验证报告
4.2 在运营线上的应用
4.2.1 运营安全评估
(1)利用列车作为载体,采用移动三维激光扫描仪对运营铁路线路进行快速扫描获取高精度点云数据,通过软件处理提取的铁路中心线坐标、轨面高程,实现左右轨道超高检测。根据轨道静态几何尺寸容许偏差值管理要求,判断既有线左右轨的超高值是否满足规范的要求[8]。
(2)根据提取的中线坐标、桥梁挡砟墙特征点坐标,计算铁路铺轨中心线与桥梁中心线的差值,判断既有线桥梁偏心值是否满足规范的要求。桥梁中心线与铺轨中心线偏差如图6所示。

图6 桥面结构立面图(cm)
(3)利用两次扫描点高精度云数据提取接触网吊柱的进行对比,判断隧道及接触网吊柱是否变形或发生位移,经计算,若接触网基座松动1 mm,调柱下端将产生12.6 mm的平面位移,因此利用高精度云数据很容易对接触网吊柱变形进行判断,从而进行必要的维护,消除安全隐患。接触网结构如图7所示。
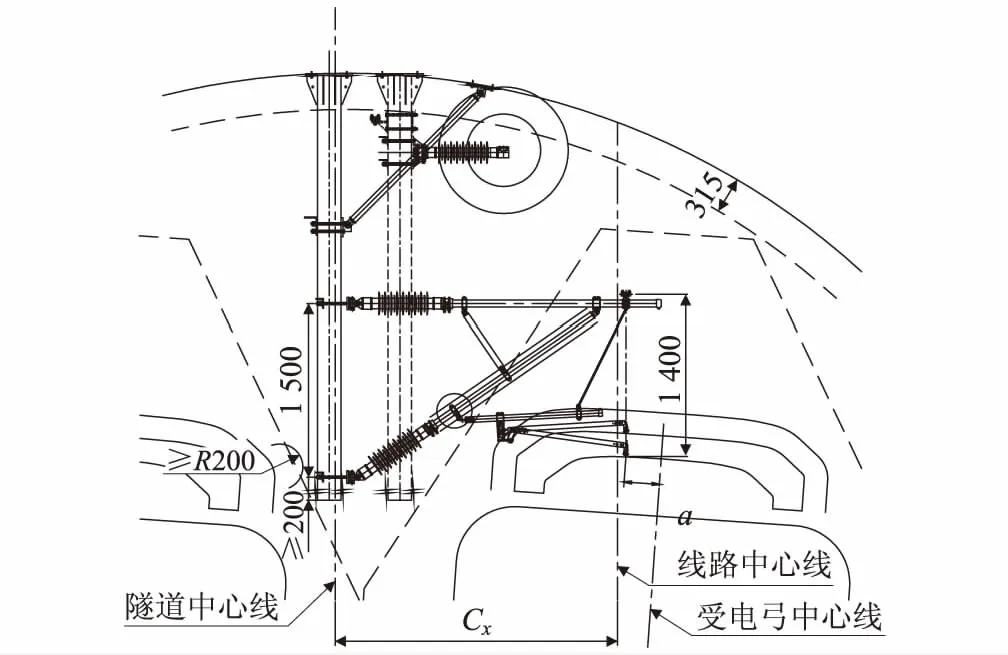
图7 接触网结构图(mm)
(4)利用高精度点云数据提取沿线设备进行设备台账管理。
4.2.2 工务大修设计
利用高精度点云数可以提取既有线中线里程、中线坐标、轨面高程、路基断面、地形地物点资料用于既有线铁路勘测设计及工务大修设计。
5 结论
(1)在高速铁路勘测设计施工中,采用基于轨道车平台的三维激光扫描移动测量技术装备和软件处理系统,利用CPⅢ平面高程控制点作为约束点进行计算得出其平面绝对精度<1 cm,其高程绝对精度<1 cm,满足高速铁路规范要求。该技术是一种全新的测量技术和方法,在高速铁路工程上应用将显著提升我国高速铁路建设及运营测量技术水平。
(2)在既有线改建工程及大修勘测设计中,采用基于列车或平板车平台的三维激光扫描移动测量技术装备和软件处理系统,通过约束点间距为400~600 m(相当于CPⅡ间距)及时速4~6 km/h的轨道小车与时速30 km/h的火车平板车进行移动扫描的精度验证。计算得出其平面绝对精度<2 cm,其高程绝对精度<1 cm,满足《改建铁路工程测量规范》要求。在既有线改建工程、大修设计及运营中应用该系统,能快速、安全获取既有铁路测量数据,大大提高勘测设计及运营管理水平。
