基于自主测试的飞行器综合测试系统研究*
2019-03-12顾彬彬程鹏马晓东朱京来冯梦琦
顾彬彬,程鹏,马晓东,朱京来,冯梦琦
(北京电子工程总体研究所,北京 100854)
0 引言
现代飞行器是由多个分系统组成的复杂机电系统,其测试性设计时一般包括设备机内测试(built-in test,BIT)和外部综合测试2部分。飞行器综合测试是指在飞行器总装集成过程中,对飞行器在各状态下施加相应的激励,采集飞行器的输出数据,依据一定的判断准则,对采样数据进行相应的解算、分析处理,判断各个分系统数据是否正常,进而判断飞行器内部各个分系统以及飞行器整体状态是否工作正常[1-2]。
一般情况下,对于涉及飞行器工作的关键参数和易出故障的地方,一般采用人工介入管理的方式,由地面测试人员负责监控测试设备状态,掌控测试进程,并对测试数据进行分析判读。该模式下,现场的各种突发情况能够由测试人员进行及时处理,测试数据的分析也能够关注到数据的细节,但是这种以人为主导的测试方式,存在着较多固有的问题,主要表现在:
(1) 人工判读容易出现失误
由于飞行器测试时的数据量非常大,而且判读时间有限,面对大量的数据,数据判读人员一般无法持续保持高度集中的良好精神状态,容易出现漏判、误判等现象,判读结果存在着较大的不确定性[3]。同时,对数据的判读处理要求方面,不同判读人员也会存在着不同的看法,主观因素同样对判读结果造成一定的影响。
(2) 对测试操作人员要求高
测试操作人员需要时刻关注测试系统的状态,并掌控测试进程的执行,容易出现误操作,同时,由于人员的专业水平有差异,在遇到一些紧急情况时很难进行及时处理。
(3) 人力成本花费较大
飞行器的各个分系统数据均需要由相应的专业人员来进行判读分析,每个型号飞行器的测试均需要配备相应数量的数据判读人员,付出了很大的人力成本。
与以人为主的飞行器综合测试模式相比,由计算机实现数据自动判读分析、自动调度测试进程的优越性越来越显著。国内已经开展了飞机自主保障、载人航天器自主健康管理等方面的研究,从不同角度提出了基于自主决策的应用构架。因此,随着飞行器功能复杂化、任务多样化的发展趋势,综合测试系统的自主测试能力面临着迫切的需求。
本文提出了一种基于自主测试的飞行器综合测试系统的体系结构,并进一步研究了相关关键技术。
1 自主测试系统构架
现有的飞行器综合测试系统一般采用串口、工业总线、局域网等形式,将内部各个功能模块有机连接起来,通过主控计算机实现综合测试系统的运行管理及飞行器的测量与控制[4-5]。测试过程中,所有的测试命令或数据都由主控计算机发送或解析,按照设定的测试流程进行飞行器测试,由操作人员对测试进程进行控制。
自主综合测试是指综合测试系统能够完成飞行器各项性能指标参数的采集,同时对自身状态进行监控,根据数据采集和状态监控等信息,对出现的异常情况能够自主进行分析判别处理,并根据处理结果对测试进程进行主动控制和调整[6-7]。
基于现有飞行器综合测试系统体系构架,本文提出了基于综合决策的飞行器自主综合测试系统构架,如图1所示,包括测试执行层、综合决策层、数据服务层。其中测试执行层负责完成飞行器测试所需的测试流程解析、仪器控制等功能;自主决策层负责完成飞行器测试数据处理判读、测试设备状态数据的监控以及测试信息的综合处理分析,并根据分析结果给出决策信息,对测试进程进行相应的控制调整;数据服务层主要提供系统运行所需的人机交互、数据显示存储、仪器驱动等基本功能。
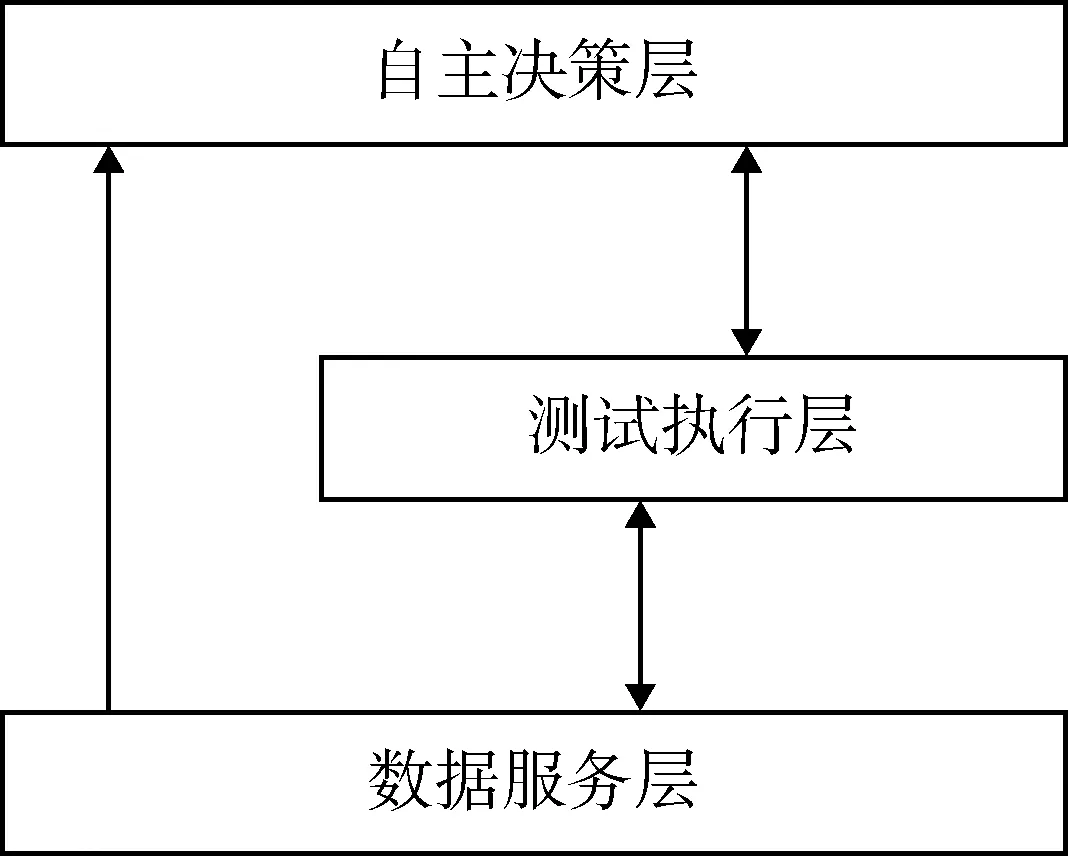
图1 地面自主测试系统架构Fig.1 Architecture of autonomous automatic test system (ATS)
2 自主测试技术研究
2.1 自主测试流程
与现有的飞行器综合测试流程不同,自主测试流程包括测试采集、测试状态监控、信息综合分析、测试决策这4个方面,形成了一个闭环测试系统,见图2。
(1) 测试采集
自主测试系统根据设定的测试进程,输出激励信号,控制相应的测试仪器,采集飞行器的性能参数数据。
(2) 测试状态监控
在自主测试系统测试性设计的基础上,在测试过程中,不影响正常测试进程,利用BIT或多传感器检测手段,检查各组成模块的功能和性能,获取自主测试系统的状态信息。
(3) 信息综合分析
根据给定的判读模型和设定的判断准则,对采集的飞行器性能参数及设备的状态信息进行自动解算判读,如出现异常,将对数据进行横向纵向等多维度综合分析,得出分析结果。
(4) 测试决策
建立测试结果匹配模型库,根据综合分析结果确定异常处理优先级,根据优先级高低采取分级处理措施,对测试进程进行自动干预。
2.2 信息综合分析
信息综合分析是基于当前测试数据和历史数据开展的,主要是从数据中尽量挖掘飞行器的潜在问题及测试系统的状态信息,主要处理手段包括测试数据的自动快速判读和数据的关联性分析2部分。
典型数据判读方法包括基于支持向量机的方法和基于神经网络的方法,但这2种方法要么需要枚举飞行器每个故障模式,要么需要进行长时间的训练,无法满足飞行器测试的实际需求[8-11]。目前,测试数据的自动判读主要还是基于特定的判读模型来实现,通过与模型的一致性匹配,寻找测试数据中的异常点。
针对检测到的判读异常点,开展进一步的关联性分析。通过将不同传感器、不同采集仪器获取的相关数据进行特征参数求取和分析,并与相关历史数据进行趋势分析,获得一定置信度下的一个或多个分析结果。
2.3 自主决策规则
自主测试系统采用基于优先级的决策策略,优先级分为4级,见表1。
对于不同优先级,一般采取以下措施:
(1) 一级优先级
对于影响飞行器和测试设备安全的严重异常问题,如电源输出电压或电流超差、液体燃料泄露、测试现场或测试系统内部温度急剧升高等,一般均应通过必要的传感器等采集设备,定时采集关键的状态参数,根据参数的变化趋势,设定严格的判断标准,实时监测关键参数是否处于正常工作范围,并设定一定的判别算法,兼顾异常现象发现的快速性和异常判断的准确性,避免虚警。异常现象确定后,快速进入紧急处理模式,即飞行器停止供电,保存数据,终止测试,并给出明确的异常描述,由测试现场维护人员采取相应的排查措施。
(2) 二级优先级
在测试过程中,如果检测到即将使用的测试设备状态异常,可根据严重程度,确定暂停或终止测试进程。如在飞行器高频通信系统测试时,发现地面信号模拟器与主控计算机通讯中断,无法收到有效的控制命令,可采取以下措施:①暂停测试,采用命令重发机制,由主控计算机多次发送控制命令,判断信号模拟器响应情况;②暂停测试,由主控计算机控制发送重启信号,控制信号模拟器进行软硬件重新配置,进入初始状态;③终止测试,提醒测试现场维护人员检查设备情况。
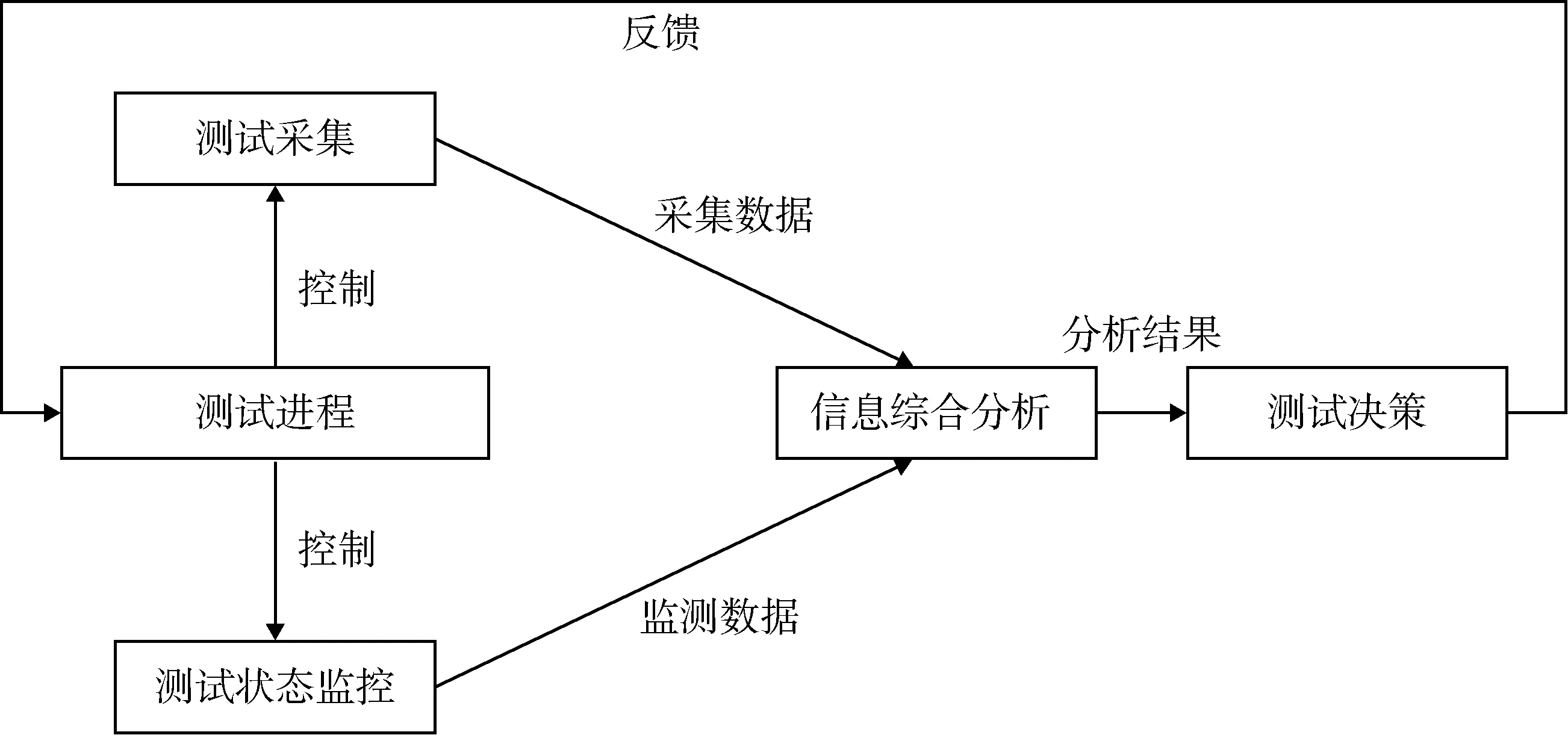
图2 自主测试运行流程Fig.2 Autonomous test process

表1 优先级表Table 1 Priority list
(3) 三级优先级
当出现飞行器测试参数一般异常时,可根据预先设定的故障树,调整测试进程,对异常现象进行进一步隔离确认。如飞行器的主控制器与高频通信系统进行总线通讯时,测试结果异常,经过测试系统对数据进行判别,发现是由于飞行器上总线通讯丢帧引起的,此时,应偏离原有的测试进程,进入故障隔离模式,如可进行其他测试,由其中一方与飞行器上其他设备进行通讯,或者直接由测试系统分别与飞行器的主控制器与高频通信系统进行总线通讯测试,确定通讯丢帧是由哪一方造成的。根据故障隔离策略完成相应的故障定位排查后,可终止测试或继续进行后续测试。
(4) 四级优先级
在测试过程中,如果检测到某测试设备部分功能异常,经过判断该异常不会影响到后续测试,可持续对其进行监测,并在测试任务结束后提示现场人员解决。
3 技术难点
在自主测试技术的实际应用过程中,存在以下两项技术难点:
(1) 测试过程中的数据量较大,自主综合测试系统需要处理大量过程信息,如果数据分析过程复杂,系统无法满足数据处理、交互的速度要求,可能会对正常的测试进程运行产生部分影响,后续将需要根据不同的测试任务,对相应的数据判读分析模型及决策规则等进行优化调整[12-13]。
(2) 由于自主决策规则主要是基于飞行器故障树开展,故障树的准确程度将很大程度上影响自主决策有效性,所以飞行器需要进行良好的测试性设计以及与测试项目相匹配的故障树设计[14]。
4 结束语
基于自主测试的飞行器综合测试系统依托于测试信息的综合分析与决策,测试过程中人工参与的需求较少,能够对飞行器进行自主测试与状态判断,并能够依据故障树进行故障处理和隔离。在现有飞行器综合测试系统的基础上,不对目前综合测试系统体系结构作大的改变,增加软件的综合分析与决策功能,并补充相应的状态监测接口,就可以完成对飞行器的自主测试,能够很好地适应网络化远程测试的需要,具有很好的应用前景[15]。
