战术分析的目标威胁判断*
2019-03-12马天林韩壮志
马天林,韩壮志
(陆军工程大学石家庄校区,河北 石家庄 050003)
0引言
在信息化战争中,空袭与反空袭已经成为战争的一种主要作战方式。空袭目标的类型呈现多样化趋势,同时,空袭目标呈现多批次、多方位、连续饱和攻击的特点,此外,空中还存在很多非攻击目标。准确快速地筛选出对我方造成破坏最大的目标成为有效防御的重要前提。因此,对空中目标进行准确、实时的威胁判断是实现有效防御和有效攻击的关键技术[1]。
对威胁判断的方法有层次分析法[2]、熵权法[3]、最大离散差法[4]、多属性决策法[5]、灰度关联法[6]、专家知识法[7]、神经网络法[8]、贝叶斯推理法[9]等。这些威胁判断模型都是首先提取目标的特征因素,进而对特征因素进行融合确定目标的威胁值。其中层次分析法判断矩阵的构造具有一定的主观性。熵权法和最大离散差法虽然客观地确定了特征因素的权重,但是权重却不符合实际情况。灰度关联法的关联系数没有考虑特征因素间的权重,仅仅计算与理想解间的欧式距离。多属性决策法和专家知识法的因素权重主观性太大,其准确性无法保证。神经网络法需要一定数量和质量的学习样本,和平环境下的样本数量和质量难以保证。同时神经网络易陷入局部学习。贝叶斯推理法的初始概率受样本影响。目标的威胁因素有距离、速度、高度、方位角、航向角、航路捷径、干扰能力、目标类型、敌我识别等,雷达可直接获取的参数有斜距、方位角、仰角、敌我识别。其他威胁因素都是通过这些目标计算得到,因此它们存在一定的耦合关系。而上述威胁判断算法只是简单地将它们独立分开,没有考虑它们之间的联系,而且具体的目标类型、目标的干扰能力等参数大部分雷达并不能准确获取。其次,多数算法在确定威胁因素权重时,通过专家人为给定,具有一定的主观性和盲目性。最后,算法最终确定的威胁值是特征因素的加权相加,最终的威胁度没有明确的实际物理意义,其准确性需要进一步的验证。
本文从战术推理出发,首先根据雷达连续2次所获取目标的斜距、方位角、仰角参数,确定目标的航向与我方目标的关系,即确定目标的攻击意图。根据目标的攻击意图和敌我识别确定目标的威胁等级,初步筛选出威胁度较大的目标。最后由目标的可攻性和目标的毁伤能力确定目标的攻击效能,根据目标的攻击效能对一级威胁目标进行威胁排序。本算法所选取的目标参数均为雷达可直接获取的参数,实用性强。其次算法根据目标的战术推理,综合考虑各个因素之间的联系。由目标的攻击效能作为威胁排序的依据,使得威胁度具有明确的物理意义。避免了主观因素权重的引入,使得威胁评估的结果更加准确。
1 威胁判断过程
威胁判断过程主要分为2个过程。首先根据攻击意图和敌我识别对空中目标进行初步威胁等级的划分,划分完成后由目标的攻击效能对一级威胁目标进行进一步威胁排序。更加有利于将高威胁度目标筛选出来。
1.1 威胁等级划分
雷达可以直接获取目标的仰角、距离、方位、敌我识别参数。间接获取的目标因素有速度、加速度、航向角、航路捷径等。其中攻击意图和敌我识别大体表征了目标的威胁等级大小。目标在空中时建立坐标系如图1所示,其中在Oxy平面上的投影如图2所示。

图1 目标空中示意图及坐标系建立Fig.1 Target aerial map and coordinate system
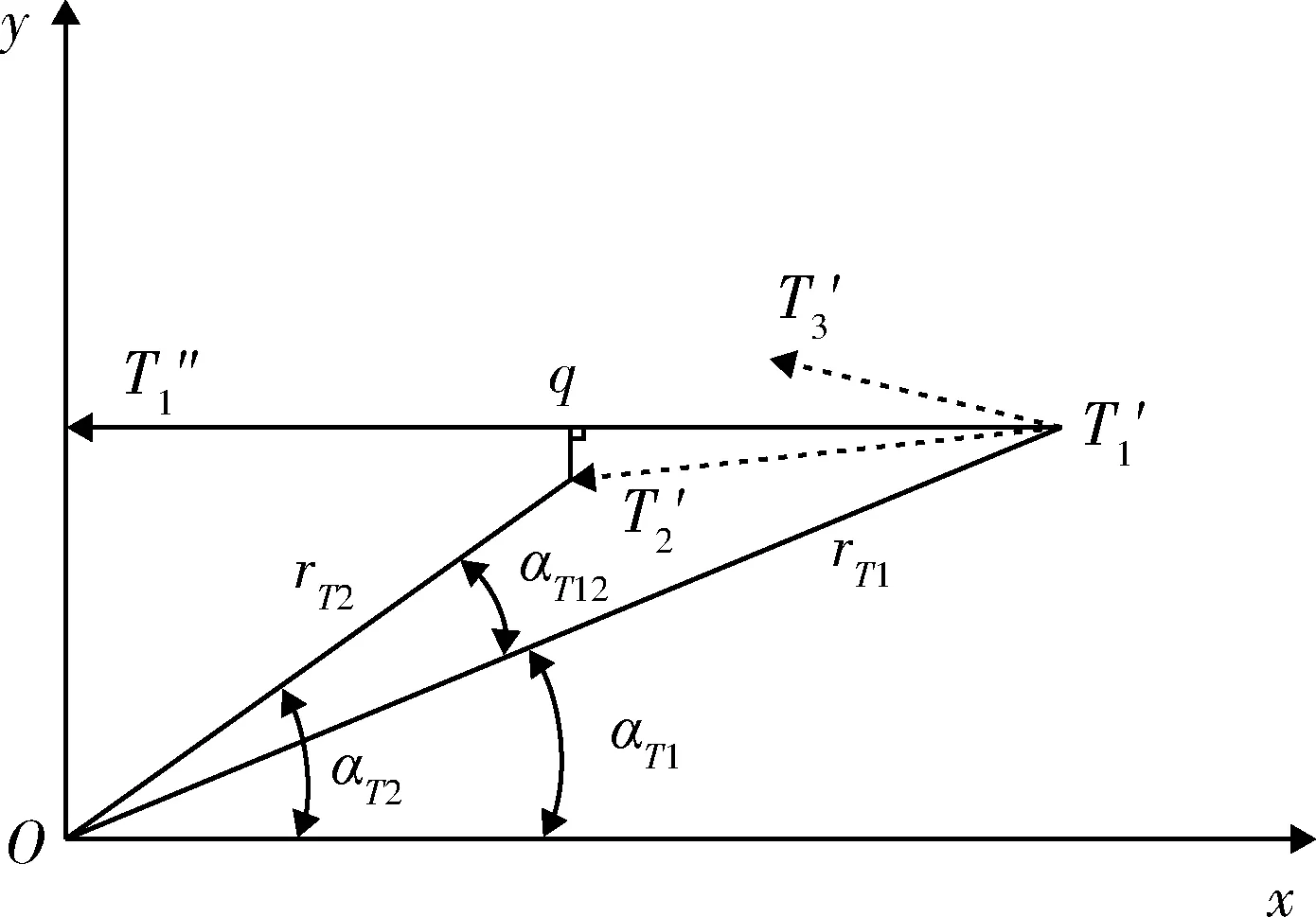
图2 目标在Oxy平面投影图Fig.2 Projection of a target in a plane
如图1所示,以我方O为原点,目标在t1时刻位于T1处,距离为lT1,方位角为αT1,仰角为βT1,目标在Oxy平面上的投影为T1′。距离经过一次雷达扫描周期(t2-t1)之后,在t2时刻探测到目标位于T2处,距离为lT2,方位角为αT2,仰角为βT2,目标在Oxy平面上的投影为T2′。如图2所示,在t1时刻目标在Oxy平面上距我方的距离为rT1,在t2时刻目标在Oxy平面上距我方的距离为rT2,从t1时刻到t2时刻目标的方位角变化为αT12。

步骤1:由雷达获取目标t1时刻的斜距lT1,方位角αT1,仰角βT1;t2时刻的斜距lT2,方位角αT2,仰角βT2,得
(1)

(2)
(3)

雷达可以通过向目标发送询问信号来区分目标是我机或不明。综合敌我识别和目标攻击意图对目标进行威胁等级排序。当识别目标为不明时,并且目标对我方有攻击意图,则将目标设为一级威胁等级。当目标识别为不明,并且对我方没有攻击企图,将目标设为二级威胁等级。当目标识别为我机,将目标设为三级威胁等级。威胁等级划分如表1所示。

表1 目标威胁等级划分Table 1 Target threat level division
1.2 基于最大毁伤概率的威胁排序
威胁等级的划分对空中目标只是一个初略的筛选,需要进一步对威胁等级为一级的目标进行威胁排序。威胁等级排序,实际上是敌方对我方攻击能力的排序。这种攻击能力,可定义为敌方目标的攻击效能,将其记为S。敌方对我方进行攻击,可分为2个阶段:一是飞临攻击位置,二是实施攻击。前者可采用目标的可攻性进行表征,后者采用目标的毁伤能力进行表征[11]。


(4)

目标的最短飞临时间与目标的速度、航向角、方位角、距离和最大机动过载有关。从战术推理可知,目标以最大过载加速度转弯,直到目标的速度方向与我方的方向相同,之后直线飞行到我方上空,此时,目标的飞临时间最短。目标的飞行路线在Oxy平面上的投影如图3所示。
如图3所示,探测到tTi时刻目标位于Ti处,目标以最小转弯半径Rmin飞行到Ti′处,此时,目标的速度方向与Ti′O的方向相同,而后沿直线Ti′O飞行到我方O点。由雷达直接探测到的目标参数,
即斜距lTi(未画出,如图1所示)、方位角αTi、仰角βTi(未画出,如图1所示),斜距lTi在Oxy平面上的投影为rTi。计算最短飞临时间,其计算步骤如下:

图3 目标飞行航线在Oxy平面上的投影Fig.3 Projection of the target flight route on the plane
(5)
同理可得
.
(6)

(7)


(8)
(9)
步骤3:在△OTiPi中,计算rOPi和∠TiPiO,可得
(10)
(11)

(12)
(13)

∠TiPiTi′=∠OPiTi-∠OPiTi′,
(14)
(15)
(16)
将目标的飞临时间规范化,得
(17)

2 仿真分析
仿真敌方出动不同类型的目标对我方进行攻击,其中包含大型轰炸机、中型轰炸机、歼击机等。此外,空中还有非攻击目标、民航客机等。某型雷达每隔3 s获取一次目标参数,获取的目标参数如表2所示。

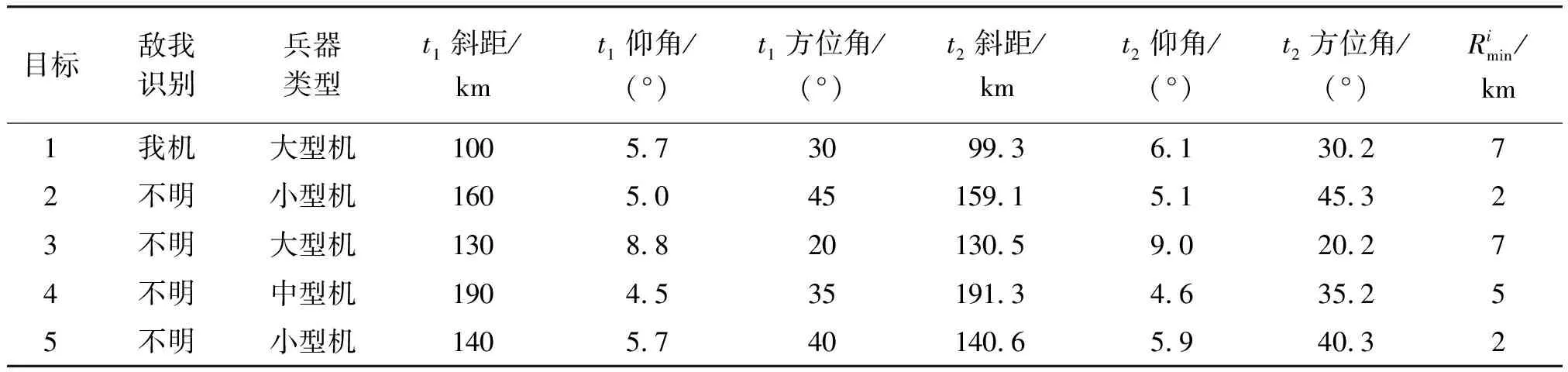
表2 t1和t2时刻获取的目标参数取值Table 2 Value of the target parameters obtained at t1and t2
根据表3中各个目标的攻击意图和表2中的目标敌我识别结果,由表1对各个目标进行威胁等级划分,划分结果如表4所示。
按照表5中的最优攻击效果S从大到小对一级目标进行威胁排序,结果为目标3>目标5>目标4。因此最终的威胁判断结果为:一级威胁目标:目标3>目标5>目标4;二级威胁目标:目标2;三级威胁目标:目标1。
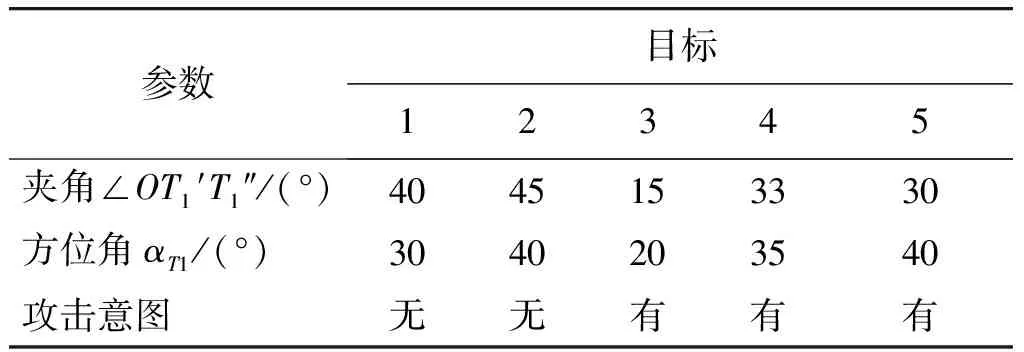
表3 各个目标的攻击意图Table 3 Attack intentions of each target

表4 各个目标的威胁等级划分Table 4 Threat level division of each target

表5 一级威胁目标的最短飞临时间和最优攻击效果STable 5 Shortest flight time and the best attack effect S oof a level threat target
3 结束语
最终的仿真结果符合战术推理和实际情况。本威胁判断算法根据雷达实际可获得的目标参数出发,首先根据目标的敌我识别和目标企图对目标进行威胁等级判断,将威胁大的目标进行初步筛选。之后,根据目标的最短飞临时间和目标的毁伤能力对威胁等级为一级的目标进行进一步威胁排序,最后获得目标的威胁判断结果。算法从目标的最大概率运动路线出发,综合考虑目标各个因素之间的联系,减少主观因素的引入,得到一个更加合理的威胁判断结果,实用性强,易于编程,运算量小。已经在卫星传输目标航迹的终端机中使用,而且取得很好的目标威胁评估,具有很好的工程应用价值。
