基于压缩感知的轨道结构故障模式识别研究
2019-03-11许汪歆袁天辰杨俭
许汪歆 袁天辰 杨俭

摘要:本文提出一种基于压缩感知的轨道结构故障模式识别方法。该方法通过设计重构信号的稀疏基与测量矩阵,将原始振动信号稀疏重构,解决了轨道振动信号在设计分类器时会出现“过拟合”的问题。通过构造11个特征征兆指标,研究重构后的数据特征征兆指标分布规律,解决了数据集维度高的问题。将特征征兆指标两两组合,结合密度聚类算法,成功区分轨道结构正常工况、道床板结工况、道床翻浆工况和轨枕空吊工况。利用归一化互信息(NMI)指标评价密度聚类结果有效性。算例表明,该方法实现了大量样本下轨道基础结构不同故障类型的特征征兆指标提取与故障模式识别。本文所提方法能够有效识别轨道结构故障,为轨道结构故障智能诊断与剩余寿命预测奠定基础。关键词:振动信号;压缩感知;轨道结构故障;特征征兆指标;密度聚类
0引言
随着铁路运营里程的增加,轨道结构病害时有发生,严重威胁着铁路线路的运营安全。轨道结构在列车动载荷和环境温度等因素作用下,空吊等病害日益凸显。目前主要依赖于铁路工务人员在天窗时间人工目视检查或手动探伤。这些方法不仅效率低下,而且有漏检的可能,如果不及时检测出故障,将严重威胁列车的行车安全。因此,如何对轨道结构进行监测、故障诊断和预警是保证轨道结构稳定的重要研究方向,
近年来,随着无线通讯技术的发展,机械设备的检测与故障诊断正朝着网络化、无损化方向发展。轨道结构振动过程中产生的数据集存在样本类标签未知、各数据集间分布不平衡、非线性、多工况、瞬态等诸多问题。目前,研究人员结合机械结构振动状态与压缩感知理论进行了一些探索。文献采用压缩感知与信号稀疏表示,结合机械振动信号自身特点,实现了压缩信号的高精度重构。文献针对稀疏字典较难重构的问题,提出优化分类的方法,将信号进行分块,得到与机械振动信号相适应的稀疏基。现有的故障诊断经验方法通常是根据已知故障数据集类别进行监督学习,无监督聚类方法,因其实现不需要任何训练样本,能较好地根据数据结构将相似度较高的样本正确分类,在故障诊断领域已有应用。上述研究多侧重于对信号进行分解与重构,以及通过改进算法进而提高信号压缩重构概率,并没有将压缩重构恢复的信号与故障诊断结合。密度聚类作为无监督学习,在数据分析、模式识别中根据数据结构自动划分不同的类别,为面向数据分析和多源数据融合的轨道结构服役状态监测及故障诊断提供新的方法。
故障诊断与模式识别的首要问题是对数据进行训练。虽然原始数据包含了样本最丰富的信息,能最完整表达样本特征,然而在数据传输过程中,采用原数据传输会增加传感器耗电,同时在设计分类器时会出现“过拟合”问题。
针对上述问题,本文提出一种新的轨道结构故障智能诊断方法。采用压缩感知原理,将轨道结构振动数据集经过稀疏分解与压缩重构,实现从数据的采集到预处理,减少数据“冗余性”;选用时域和频域特征参数作为特征征兆指标,实现降低数据维度,解决了“过拟合”问题:特征征兆指标通过在密度聚类算法下两两组合,实现在不同特征指标组合下识别轨道结构状态,为轨道结构故障智能诊断提供参考,
1车辆一轨道耦合动力学计算模型
车辆采用四轴二系悬挂的整车模型,轨道系统模拟成三层连续弹性点支撑梁体系,各支撑点以轨枕间距隔开,钢轨采用Euler梁模型,以减少模型的复杂程度:轨枕、钢轨与道床间采用弹簧和阻尼连接:考虑到钢轨、轨枕及道床垂向振动特性,道床采用锥台参振模型。文献的计算结果表明,计算长度为100m的轨道长度满足仿真计算要求。本文中轨道长度为l=120m.取位于轨道结构中心i=97-103共7个轨枕等截面单元,轨枕间距Js=0.6m。翟婉明院士在《车辆一轨道耦合动力学》中指明,轨下基础支承刚度或阻尼沿纵向不均匀变化时,可以对模型中各支点刚度和阻尼元件逐一赋值。轨下基础支承引起的轨道刚度或阻尼突變,缺陷通常为轨枕空吊、道床翻浆和道床板结。某处轨枕完全丧失正常的工作能力可以相应在模型中设为及Kbi=Cbi=0;道床板结或翻浆等缺陷,相应在模型中设为Kbi=ηkKbi,Cbi=ηcCbi,ηk、ηc分别为道床刚度、阻尼变化系数,对于不同的情况,ηk、ηc可在0.1-10范围内取值。图l给出了车辆一轨道耦合模型的振动截面图。其中,B1-B1,B2-B2和B3-B3,为故障可能出现的断面。
1.1仿真计算
运用达朗贝尔原理,可以建立轨道系统动力学方程如式(1):
其中,Z为位移向量;Q为力向量;M为质量矩阵,C为阻尼矩阵;K为刚度矩阵。运用Newmark方法,通过理论分析和数值计算,可以得到轨道系统动力学响应的时间历程。通过改变轨道结构的质量、刚度和阻尼矩阵以及列车运行速度等参数,模拟不同工况下轨道结构振动响应的变化规律。在分析车辆通过轨道故障结构路段的耦合振动时,选取轨枕振动加速度作为动力学响应指标。模拟轨道结构振动响应工况,以正常工况下99号轨枕为例。设定采样频率为10kHz.行车速度200km/h.如图2所示。采样点数为N=8000.在0.5s-1.3s内振动响应时间历程满足振动响应分析要求。
1.2数值计算结果及仿真分析
仿真计算中,车辆运行速度取80km/h、120km/h、160km/h、200km/h。本文对正常工况、轨枕空吊、道床翻浆和道床板结的工况分别作了仿真计算,具体计算方案见表1。
根据上述计算工况表,不同工况下的轨枕加速度都发生变化。当轮轨冲击作用力沿着钢轨传递到轨枕,空吊工况下轨枕的加速度也产生较大变化。轨枕空吊引起的轨枕加速度增加表明轨道结构故障区段的轨枕间距和轨道结构支承刚度已发生变化。
由于车身的分布质量和轮轨作用力对轨道结构振动响应有影响,并且轨道结构服役周期长,巡线检测获取数据量大,单纯从时域分析角度无法较为全面地识别轨道结构故障。因此基于振动信号处理和特征征兆指标提取的故障模式识别方法是预测轨道结构状态的重要方法之一,
2轨道结构振动信号压缩感知
原振动信号X(t)∈8000x1虽然维度高,而实际的有效信息集中在低维空间中。压缩感知是基于线性降维的思想,采用远低于传统的奈奎斯特采样定理要求的采样方式重建原信号。通过信号的稀疏性表示、观测矩阵的不相关性设计以及通过某种算法对原信号的非线性重构,实现信号的稀疏分解与重构。本文采用压缩感知与信号稀疏重构的过程如图3所示。
2.1轨道结构振动信号的稀疏表示与压缩测量
振动信号的稀疏表示是一个将原信号降维的过程。通过选择合适的稀疏基矩阵φ,求出观测向量y在稀疏基矩阵上的稀疏表示S。取正常工况的轨枕振动加速度时程曲线作为原信号x(t)∈ RN。如果轨枕振动加速度时程曲线可以稀疏表示,那么原信号x(t)=[x1,x2,…,xN]表示为:
式中,ψ=[ψ1,ψ2,…ψN]为稀疏基,S=[S1,S2…,SN]是稀疏系数。当ⅡS Ⅱ0=k(k《N)时,称原信号x是k-稀疏信号,其中ⅡⅡ0示l0范数。事实上,大多数信号在时域上并不稀疏,通过选择合适的变换域,将时域信号转换为稀疏域信号,实现轨枕振动信号的稀疏表示。一般情况下,振动信号稀疏域的选择可以是离散傅里叶变换(DiscreteFourier Transform.DFT)、离散小波变换(DiscreteWavelet Transform.DWT)、离散余弦变换(discretecosine transform.DCT)。离散余弦变换的变换矩阵能较好地描述时变信号的相关特征。因此,本文选取DCT变换作为轨枕振动信号的稀疏基矩阵。对于99号轨枕振动加速度时程曲线,其一维离散余弦变换可以表示为,
(3)式的矩阵形式为F=Cf.其中,变换矩阵C为:
根据图2的振动时程曲线,取采样点长度N=8000.进行DCT域稀疏表示,仿真结果如图4所示。
根据图4的仿真结果,在DCT变换域中,已将原信号采样点N=8000稀疏表示为N=200稀疏采样点,并且仅有少量非零值(如图4虚线圈所示)。因此,99号轨枕振动信号是可压缩的,可以对该信号进行随机亚采样。信号在采样阶段,通过观测矩阵φ∈ RM×N将原信号X(t)投影到低维空间y∈RM观测值与原信号之间的表示为:
由于观测值的维数远小于原信号维数,式(5)是欠定方程组,即原方程没有唯一解,因此不能直接通过(4)式求解出原信号x。要想从M个观测值中重构恢复出N个原信号,这就要求矩阵
观测矩阵与稀疏基矩阵的乘积满足RIP性质。满足上述条件后,重构振动信号x的过程可以转化为求解如下最优化问题:
式中,norm(x.0)是正则项,虽然能够保证式(5)的解具有唯一性,但仍不能求解出该问题。文献[10]已经证明,正则化的l0范数可以使用l1范数替代,所以优化问题转换成一个凸优化问题。如式(11)表达式:
凸优化问题可以通过线性优化来解决。近几年,研究者们对于求解优化问题做出了不少研究,主要包括贪婪算法求解、lasso模型以及組合算法求解。
2.2 重构算法的理论框架
重构算法主要包括匹配追踪(Matching Pursuit.MP)算法、正交匹配追踪(Orthogonal MatchingPursuit.OMP)算法及l1范数(l1Norm)算法。OMP算法可以实现将原轨枕振动信号转化为较多0稀疏,同时不降低信号精确度,从而产生稀疏解,尤其适用于故障诊断的振动信号数据传输。本文采用正交匹配追踪(OrthogonalMatching Pursuit)算法重构步骤见表2。
2.3轨道结构振动信号算例分析
结合轨道结构振动响应,根据矩阵的RIP性,稀疏变换基ψ为8000×8000的离散余弦变换(DCT)矩阵,观测矩阵φ为高斯矩阵。文献[18]已证明,观测矩阵在满足观测次数
M≤C×S×log(N/S),(12)
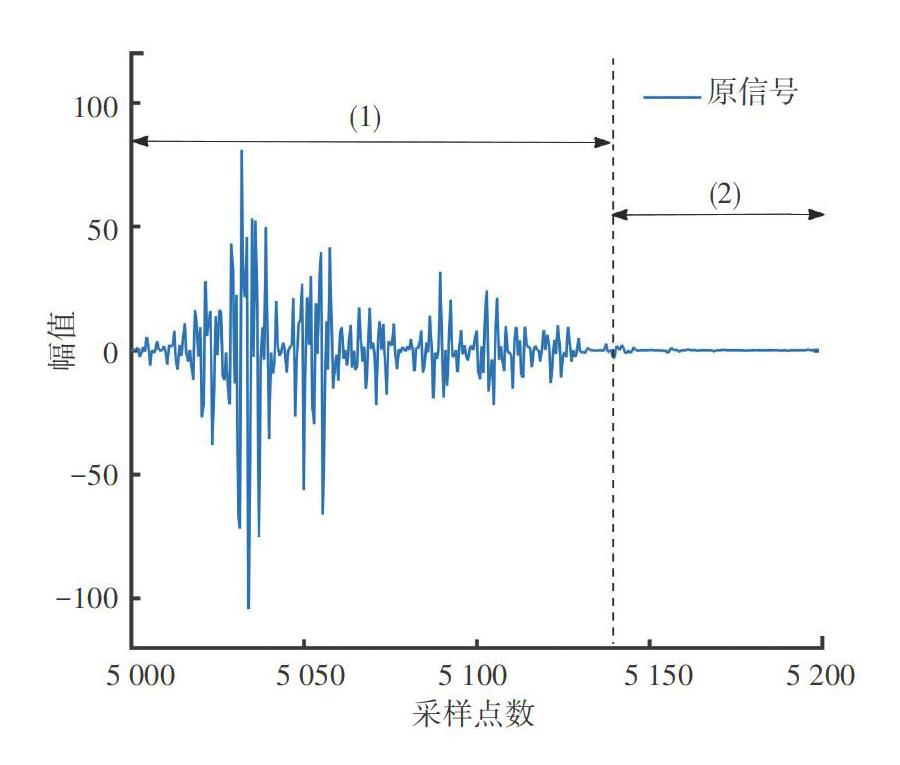
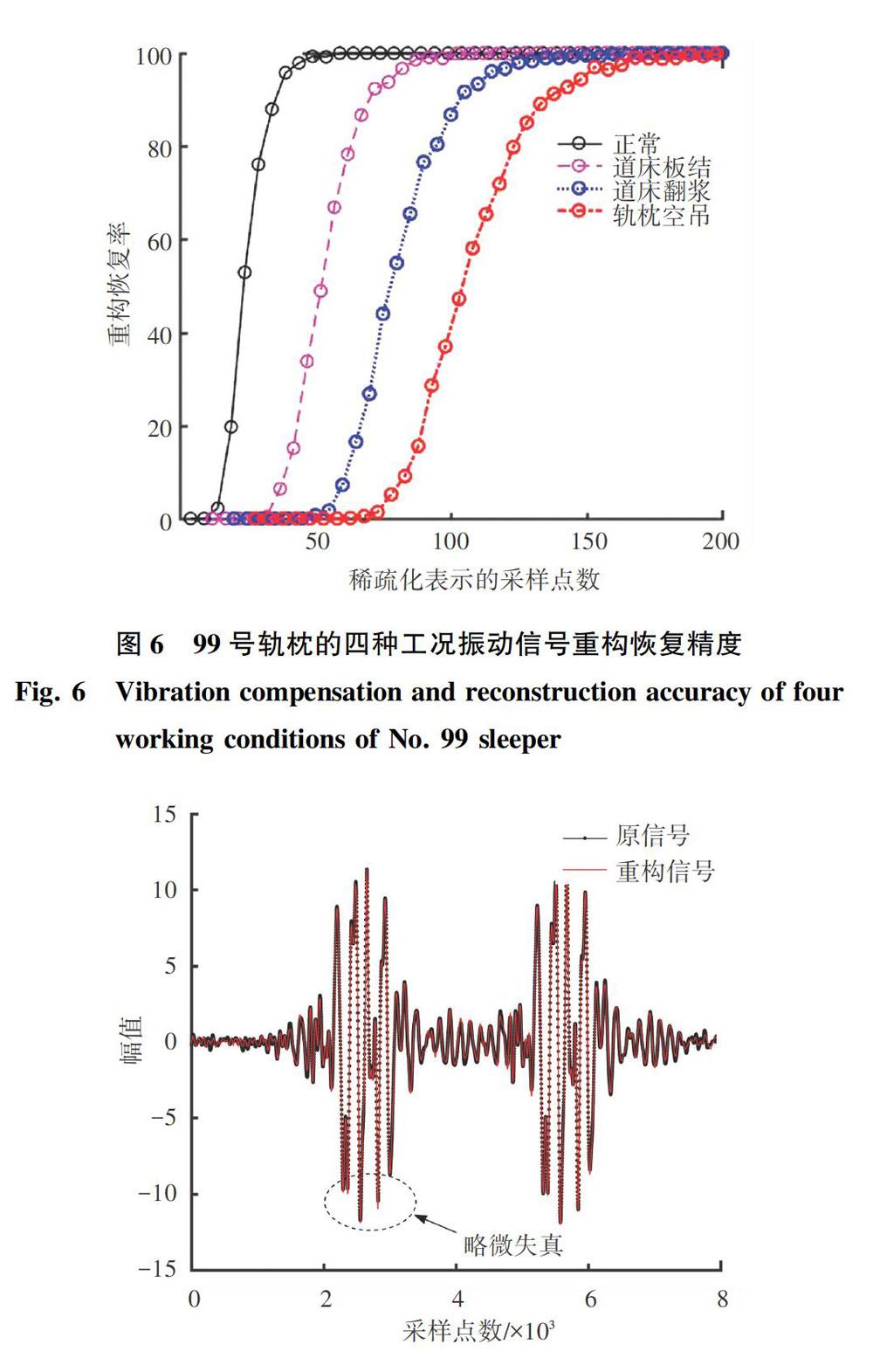
就能够以较低的采样率高概率恢复原始信号。式中,5是信号稀疏度;N是信号的长度;S;N;C是依赖于(9)式的RIP常数δ。将振动信号稀疏分解后,得到图5所示稀疏表示,该稀疏表示由两部分组成。在第一部分即采样点数为200时,原信号稀疏分解的幅值较明显:稀疏表示在第二部分幅值趋于0。经过稀疏分解的200个信号,通过OMP重构算法得到如图6所示的重构曲线。每一条曲线代表了一种工况的重构恢复率,尽管不同工况需要的稀疏采样点数不同,但四种工况都在采样点数达到200时,重构恢复率达到100%。
以稀疏表示的振动信号作为输入,根据表2.得到轨枕振动加速度的信号重构对比仿真图。尽管有峰值失真(如图7所示),但整体重构信号没有明显的误差。图7的仿真结果表明,可以采用OMP算法重构轨枕振动加速度信号。
2.4轨道结构振动信号重构及迭代残差分析
采用压缩率衡量轨道振动信号的压缩程度,表示为:CR值越大,信号越稀疏。
正常工况和故障工况(道床板结、道床翻浆和轨枕空吊)的稀疏信号在该算法的迭代残差结果如图8所示。当迭代次数达到稀疏采样点数N=200时(图8第(1)部分),残差值已经趋于0.以上结果进一步证明OMP算法能较好地重构原振动信号。
2.5轨道振动信号特征征兆指标提取
特征征兆指标的提取是对轨道基础结构进行监测、故障诊断以及故障预测的基础,振动加速度能较好地反映轨道结构状态。结合文献[20],采用表3定义的各个时域和频域特征参数对轨道结构振动数据进行特征征兆指标提取。信号进行特征征兆指标提取后是高维的特征向量,本文采用基于密度聚类算法(Density-Based Spmi~Clustering 0fApplications with Noise.DBSCAN),将高维特征向量通过两两组合达到降维效果,实现在不影响轨道结构故障模式识别的基础上,减少特征向量的输入。
3基于密度聚类算法的轨道结构的故障模式识别
类别可分离性反映不同的类在特征征兆指标组成的平面中的离散情况。通过特征形成、特征提取、特征选择和故障模式识别,识别出不同的轨道结构故障,表征轨道结构服役状态,以实现轨道结构故障在线监测,
3.1基于空间密度的聚类方法(DBSCAN)
密度聚类算法(DBSCAN)是由Martin Ester等人提出,该算法只需输入一个参数ε(邻域半径),并且可以根据一定的启发式规则选取参数。该算法无需预先指定聚类数目,可以对大规模无规则形状的数据点进行有效的聚类。通过DBSCAN算法,可以实现将数据集合D分为M个不同的类。该方法基于数据点的密度可达和密度相连的概念。从某个选定的核心点出发,不断向密度可达的区域扩张,从而得到一个包含核心点和边界点的最大区域,区域中任意两点密度相连,将划分结果定义为密度相连对象的集合,类C是数据集合D的非空子集:
(1)ε-邻域:某点P的ε-邻域用Nε(P)表示,定義为集合Nε(p)={g∈D| dist(p.g)≤ε},由此设置合适的阈值MinPts.通过判断|Nε(p)|是否小于MinPts.将数据点分为边界点和核心点。
(2)如果p∈Nε(p)并且|Nε(p)|≥MinPts.那么,点p从点g关于ε和MinPts直接密度可达。
(3)密度可达:如果存在数据链p1,p2,…,pn,p1=g.pn=p.并且满足点pi+1从pi直接密度可达,那么点p从点g关于ε和MinPts密度可达。
(4)密度相连:如果存在核心点O∈d.且边界点p.g分别从核心点O关于ε和MinPts密度可达,那么边界点p与边界点g密度相连。该算法的流程如图9所示,
3.2基于DBSCAN的轨道结构故障模式识别
DBSCAN算法为了获取一个簇,形成具有相同密度数据之间的聚类,在扫描输入的数据集时,该算法会判断当前数据q是否为核心点,进而判断是否需要形成新的簇类。以1.1节中的工况为例,根据表3计算出有效的特征征兆子集作为输入数据集,得到结果见表4。
根据图9的算法流程,对轨道结构特征征兆指标数据集聚类,识别不同的故障模式。仿真结果如图10所示。双向箭头表示不同类别间的距离。一个特征征兆指标代表一个维度,不同特征征兆指标之间两两组合,可以从不同特征空间对轨道结构故障识别。
将图10的(a)与(d)比较来看,道床板结工况与正常工况在脉冲指标和峭度指标这两个特征征兆指标下,类间离散程度较大,而在图10(a)中没有这样的聚类效果。图10的(b)与(c)是波形指标和脉冲指标、波形指标和平均幅值的对比图。从波形指标与平均幅值的组合来看,密度聚类算法不能对正常工况与道床板结这两个类别间进行区分。事实上,道床板结虽然降低了整个轨道系统的弹性功能,但对轨道结构垂向振动影响并不大,单纯从轨道动力学角度不容易识别,而这一点在密度聚类算法中(图10的(d)、(e)、(f))已能较好地区分。因此,轨道动力学结合振动信号处理和特征征兆指标提取,能实现轨道结构服役状态故障模式识别,为轨道结构在线监测奠定基础,
3.3 聚类有效性评价指标
由于在密度聚类识别中,数据集的结构及分布是未知的,因此需要验证密度聚类结果的合理性和有效性。可以通过建立一个评价函数,评价聚类的有效性问题,聚类评价指标实现了度量聚类算法结果是否有效的性能。
由于轨道结构振动时域数据存在冗余性、数据结构分布不明确等特点,从紧致性、分离性和重叠度等方面评价类别划分结果。采用归一化互信息(NMI)指标描述密度聚类结果的有效性。NMI用于衡量两个聚类结果Ck和Cl的吻合程度。其表达式如下:
其中,N是数据个数;C是混淆矩阵;矩阵中的元素Cij表示既在K类中也在L类;CK(CL)表示K(L)类的个数;Ci.(C,j)是矩阵C中所有元素的总和。NMI的值越大,K和L的划分越相似,当NMI的值为1时,表明K和L是属于同一个类。
基于密度聚类的轨道结构聚类的有效性评价指标函数,道床板结与正常工况这两个类别在波形指标与平均幅值中,NMI值接近于1.这表明道床板结与正常工况这两类几乎是同一个类别,同时也表明其重叠度明显。对于道床翻浆与轨枕空吊,这两个类别无论在哪个特征征兆指标对应的维度下,类间分离性较大,类内具有高度紧致性。
4结束语
随着无线通讯与物联网技术的发展,轨道服役状态的智能监测与预警问题受到广泛关注。然而轨道结构的病害检测目前依赖于人工检修与轨检车巡线检测。针对这一问题,提出一种基于压缩感知的轨道结构故障模式识别的方法,结论如下:
(1)利用轨枕振动信号的可稀疏化表示,提出采用离散余弦矩阵作为稀疏基,解决了轨枕时变信号冗余特性带来的无法构造正交基矩阵的问题。
(2)基于OMP贪婪算法对轨枕的振动信号进行重构,比较了正常工况、翻浆工况、板结工况和空吊工况下的重构恢复率,结果表明上述工况在OMP算法下都能精确重构。
(3)利用时域和频域特征参数表达式将压缩重构的轨枕振动信号转换成11个特征征兆指标,结合密度聚类算法,成功区分出轨道结构的正常工况和三种故障工况(翻浆工况、板结工况和空吊工况),实现了轨道结构无损化监测。
