基于DDPG的无人车智能避障方法研究∗
2019-03-11徐国艳宗孝鹏余贵珍苏鸿杰
徐国艳,宗孝鹏,余贵珍,苏鸿杰
(北京航空航天大学交通科学与工程学院,北京 100191)
前言
在未知环境中,无人车运行须躲避任意形状的静态和动态障碍物,为提高无人车的智能性,控制算法须考虑一系列环境状态。现有的控制算法大都是基于规则的,但这种人工经验编程很难应对其它突发情况,因此有必要提出一种更加智能的算法来解决这个问题[1]。
随着强化学习的发展,越来越多的研究者将其应用在无人车控制中。强化学习的目的是通过与环境的交互学习最优的行为。与传统的机器学习相比,强化学习有以下优势:第一,由于不需要样本标注过程,它能更有效地解决环境中存在的特殊情况;第二,可把整个系统作为一个整体,从而使其中的一些模块更加鲁棒;第三,强化学习可比较容易地学习到一系列行为。这些特点,对于无人车决策控制都很适用。
深度强化学习(deep Q network,DQN)将深度学习与强化学习相结合,能更容易实现人类水平的控制。在DQN模型中,深度学习用来处理传感器数据,强化学习用来做出决策。这种模型已在Atari游戏中成功实现,并且通过像素输出,做出人类玩家水平的决策[2]。然而,DQN模型只能处理离散低维动作空间的问题,而无人车的控制是一种连续高维动作空间问题,须输出连续的转向盘转角值和加速度值,DQN算法无法解决。
一种典型的解决方法是将动作空间离散化,但离散程度过高,会引起“维数灾难”;离散程度过低,会降低控制精度;因此,离散化动作空间不是解决连续动作空间问题的最优选择。针对这个问题,谷歌DeepMind团队提出深度确定性策略梯度算法(deep deterministic policy gradient, DDPG)[3],在仿真环境中实现了连续动作空间的控制。
本文中提出一种无人车控制模型,首先定义无人车的输入和输出状态,讨论车辆内外约束条件;然后设计奖赏函数与探索策略,提出改进的DDPG算法。为了评估避障策略的有效性,在TORCS(the open racing car simulator)仿真软件中搭建各种仿真环境,包含不同赛道和不同车辆。通过设计静态和动态障碍环境来验证算法的有效性。结果表明,通过一段时间的自学习,无人车能够学习到优秀的行为,并且在新的测试环境中表现良好。
1 无人车状态定义
1.1 传感器数据融合
DDPG算法中的环境状态信息通过传感器数据获得,输出动作包括无人车的转向、加速、制动和挡位值。因此首先要设计无人车传感器数据融合方法,作为DDPG算法的环境状态输入。
1.1.1 传感器类型
无人车通过各种传感器感知环境信息,常用的传感器包括摄像头、GPS、激光雷达和超声波雷达。摄像头可识别车道线信息,判断车辆与车道线的相对位置;GPS提供实时的位置信息和车辆行驶状态,包括航向角、车速等;激光雷达检测到车身周围障碍物的距离信息;超声波雷达布置在车身周围,实现道路边缘检测。
1.1.2 多源传感器数据融合
无人车上的传感器可提供关于车辆状态和车辆周围环境的有用信息。避障算法中使用的输入变量名称和定义如表1所示。

表1 输入变量定义
在真实运行环境中,通过摄像头进行车道线识别,获得车辆运行方向与道路轴线的夹角,用弧度表示,同时获得车辆质心至路面投影点与道路轴线的距离,并将此距离按道路半宽归一化为[-1,1]。通过GPS数据获得车辆纵向和横向速度,方向遵循汽车坐标系标准。通过激光雷达与超声波雷达,获得车辆周围360°范围内障碍物距离,以及车辆与道路边缘的距离。
由于无人车获得的是多个不同类型的传感器观测数据,信息具有多样性和复杂性,因此须进行合理有效的融合,作为无人车状态输入。
多源传感器数据融合的过程如下:
(1)收集多个不同类型传感器的观测数据;
(2)对传感器的输出数据进行特征提取,得到代表观测数据的特征值;
(3)对特征值进行数据关联,完成对相同目标的共同描述;
(4)对不同目标的特征值进行组合,以字典的格式传入,作为强化学习模型中的状态输入。
至此,完成了多源传感器的数据融合和无人车的状态描述。
1.2 车辆约束条件
1.2.1 车辆动力学约束
无人车通过控制转向盘转角和加速/制动踏板来躲避障碍物。当速度过高时,车辆可能发生滑移甚至侧翻,因此为提高行车安全,车辆行驶时要求侧向加速度不大于0.4g[4]。

式中:ay为侧向加速度;g为重力加速度。
侧向加速度与前轮转角和车速的关系[5]为

式中:u为车速;δ为前轮转角;K为稳定性因数。K通过下式来计算:

式中:m为汽车质量;L为车辆轴距;a为前轴到车辆质心的距离;b为后轴到车辆质心的距离;k1和k2分别为前后轮侧偏刚度。根据约束条件:ay≤0.4g,得

从而前轮转角满足:

1.2.2 交通规则约束
除了车辆动力学约束外,还须考虑交通规则约束。典型的交通规则约束包括交通信号灯、车道线和速度限制等。当无人车在避障过程中换道时,必须遵守相关的交通规则约束。在仿真环境TORCS中主要考虑车道线限制与速度限制。车道线分为实线和虚线,在换道过程中实线不可穿越,而虚线可以。速度限制指最高速度不得超过120km/h,读取无人车实时车速,通过反馈调节限制车辆速度。
1.3 控制变量
无人车的控制通过一组典型的执行器实现,即转向盘、加速踏板、制动踏板和变速器,变量定义如表2所示。

表2 输出变量定义
2 无人车避障策略设计
2.1 奖赏设计
强化学习的奖赏函数将感知的状态映射为增强信号,用来评估动作的好坏。奖赏信号通常是标量,正值表示奖励,负值表示惩罚。奖赏函数的奖赏值与每一时刻车辆纵向速度呈正相关,当车辆发生碰撞或驶出车道线时给予额外的惩罚。本文中设计奖赏函数如下:
当发生碰撞时,奖赏值设为-10,如果车辆行驶出道路,奖赏值设为-20。其它情况下,奖赏值的目的是最大化车辆纵向速度,最小化侧向速度。其中,φ为车辆纵向与道路轴线的夹角,vx为车辆纵向速度,因此vxcosφ表示车辆沿道路轴向方向的速度,vxsinφ表示车辆沿垂直于道路轴线方向的速度。考虑到交通规则约束,即无人车不能穿过道路边缘的实线,在公式中添加第 3项vx|trackPos|,其中|trackPos|表示车辆质心至路面投影点与道路轴线的归一化距离。
每次实验都包含许多学习回合,当车辆出界或者陷入局部最小值即速度小于设定的最小值时,结束该回合的学习。
2.2 探索策略
在强化学习中,适当的探索策略必不可少,尝试更多新的动作可避免陷入局部最优,即在某些特定的场景中总是采取相同的行动。奥恩斯坦-乌伦贝克过程是一种具有平均回归特性的随机过程,本文中用它来实现连续空间中的探索[6]:

式中:ε为变量趋于平均值的速度;μ为均值;σ为过程的波动程度。将该过程分别添加到转向、制动和加速中,其中加速的μ值需合理设置,避免出现车辆一直踩制动踏板不踩加速踏板的极限情况。
2.3 DDPG算法改进
DDPG结合了DQN、确定性策略梯度算法DPG(deterministic policy gradient)和演员-评论家算法(actor-critic methods),可解决强化学习中连续动作空间问题[3]。DQN利用神经网络来逼近值函数,其参数是每层网络的权重,对值函数进行更新其实就是更新权重参数。DPG算法采用异策略学习方法,行动策略采用随机策略,以保证足够的探索,评估策略采用确定策略,以减少动作空间的采样数量。DPG采用演员-评论家算法框架,它通过分离策略函数和价值函数来降低学习难度,策略函数被称为演员,价值函数被称为评论家,演员根据当前的环境状态产生一个动作,而评论家则对演员采取的动作进行评价。在本文中,评论家网络模型选择SARSA(state action reward state action)算法,演员网络模型选择策略梯度算法。
在常规DDPG算法中,网络从回放缓冲区中随机采样进行离线训练。回放缓冲区是一个有限大小的缓冲区R,元祖(st,at,rt,st+1)储存在缓冲区中并且根据探索策略随机采样。然而,由于有限的采样空间大小,且前期的样本学习效果一般,导致后期学习速率将变慢,且行为无法明显改善。因此,在学习的第二阶段增大样本空间,增加后期行为较好的样本,改进后的算法如表3所示。

表3 改进的DDPG算法流程[3]
在迭代更新过程中,先积累经验回放缓冲区直到达到数据库指定个数,然后根据样本分别更新两个网络,先更新评论家网络,通过loss函数L更新参数θQ。再通过评论家得到的Q函数相对于动作的梯度,然后应用演员网络更新公式更新参数θμ。更新得到的参数θQ和θμ按照比例(通过参数τ)更新到目标网络,这个目标网络会在下一步的训练中用于预测策略和Q函数值。
3 仿真实验
在TORCS中实现避障算法的仿真,TORCS是一款高度可移植、跨平台的多车竞技、开源游戏平台,它拥有多玩家、多智能体、多赛道和多模式(练习模式、快速比赛、冠军赛等)[7]。TORCS中含有不同的赛道,这些道路都包括静态障碍物和动态障碍物。静态障碍物包括道路边缘、树木和建筑物,动态障碍物是指移动的竞争车辆,无人车的目的是躲避这些障碍物,并尽快完成比赛。
根据障碍物种类,将无人车任务分为两类情况:情景一只包含静态障碍物,情景二包含静态和动态障碍物。无人车躲避这两种情景的障碍物,设定不同的参数,使车辆可学习到更好的策略。
3.1 情景一:静态障碍物
3.1.1 参数设定
首先,在没有其它车辆的道路上进行网络训练,无人车躲避的静态障碍物包括路边沿、树木和建筑物等。
演员网络和评论家网络均通过Keras构建。演员神经网络由两个隐含层组成,分别有300和600个单元。输出层根据变量的值域选择不同的激活函数:tanh激活函数的输出范围是[-1,1],用于实现转向指令;sigmoid激活函数的输出范围是[0,1],用于实现加速和制动指令。策略网络的学习速率是10-4。评论家网络包含两个隐藏层,分别有300和600个单元,学习速率是10-3,神经网络训练大约600个回合。
3个输出变量的随机噪声采用奥恩斯坦-乌伦贝克过程,作为适当的探索策略,且噪声随训练过程的增多逐渐减小,具体参数如表4所示。

表4 随机噪声参数
ε代表变量趋于平均值的速度,由于转向动作数量多,需提高转向的探索次数,将转向的ε设置为0.6,加速和制动的ε设为1.0。μ代表噪声的平均值,转向有正有负,因此均值为0;加速均值为0.6,使车辆拥有初始速度;为了避免频繁制动,将制动μ值设为-0.1。σ为噪声的波动程度,为提高转向的探索动作数量,将转向的σ值设为0.30,同样地,为避免频繁制动,加速的σ值需大于制动的σ值,分别设为0.10和0.05。
3.1.2 实验结果
选择CG Speedway number 1作为训练赛道,如图1所示。其长2 057.56m,宽15m,拥有道路的典型特征,包含静态障碍物和车道线,中途有20个坑洼障碍。

图1 训练赛道
图2为每回合的训练步数。由图可知,在大约前800个回合,无人车的训练步数均小于500步,表明无人车触发训练终止条件,即无人车驶出道路或者陷入局部最小值(速度为0)。大约在第805个回合,训练步数开始增加,普遍超过500步,甚至超过2 000步,表明无人车学习到较好的策略,能完整地跑完整条赛道,并重复行驶多圈。在第900个回合左右,有几个回合的训练步数减小,是由于无人车尝试随机探索动作的原因。
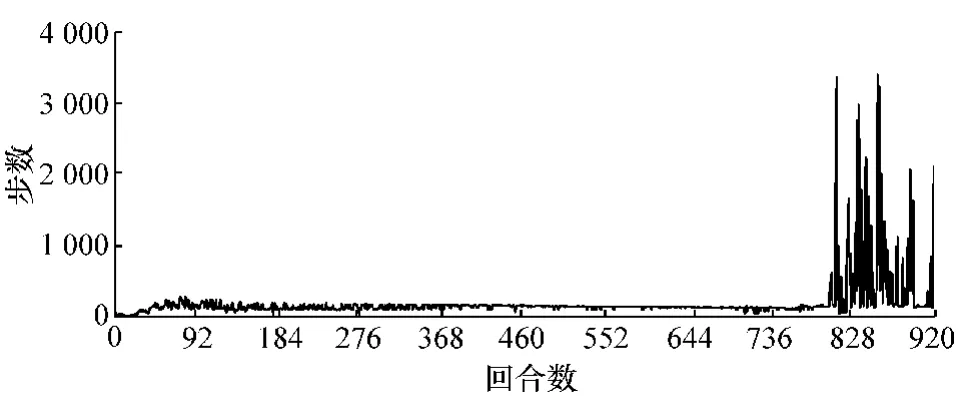
图2 每回合步数
无人车每回合的累计奖赏值如图3所示,无人车的目的是通过不断学习来提高环境奖赏值,从而获得最大的奖赏值。因此,奖赏值越大,表明学习效果越好。对比可知,累计奖赏值的变化趋势与每回合步数变化趋势保持一致。
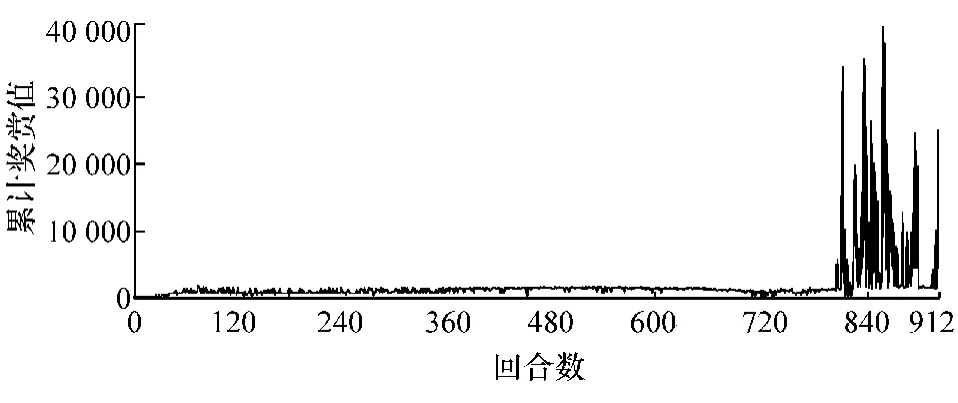
图3 每回合累计奖赏值
每一回合的每一步平均奖赏值反映了学习进程的效果。学习过程如图4所示,平均奖赏值呈逐渐增加的趋势。大约经过400个回合,平均奖赏值大于50,表明无人车学习到较好策略。在720个回合左右,平均奖赏值有一定的降低,且直到第840个回合左右才趋于稳定,保持一个较大的值。
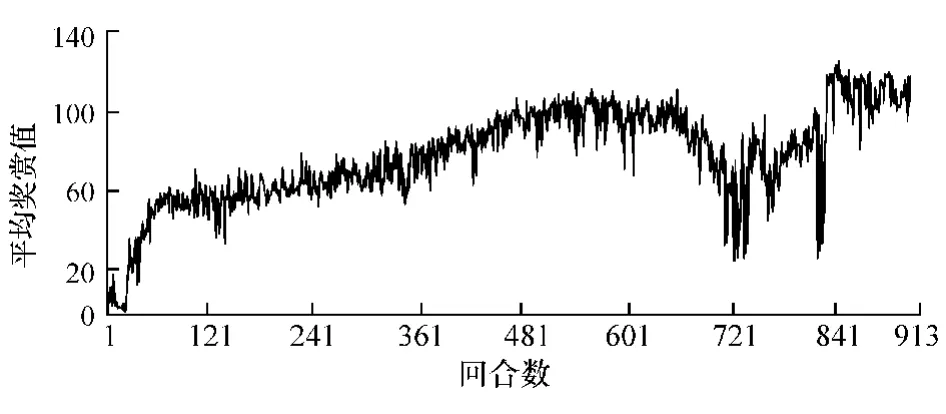
图4 每回合平均奖赏值
在赛道CG Speedway number 1学习完成后,在另一赛道CG track 2上进行算法验证,验证赛道要比学习赛道更长,更复杂,长3 185.83m,宽15m,在赛道中含有16个坑洼障碍,如图5所示。

图5 验证赛道
图6为在验证赛道上每步的奖赏值。由图可以看出,所有的奖赏值均为正值,表明无人车能成功跑完整条赛道,每一步都没有碰撞发生。
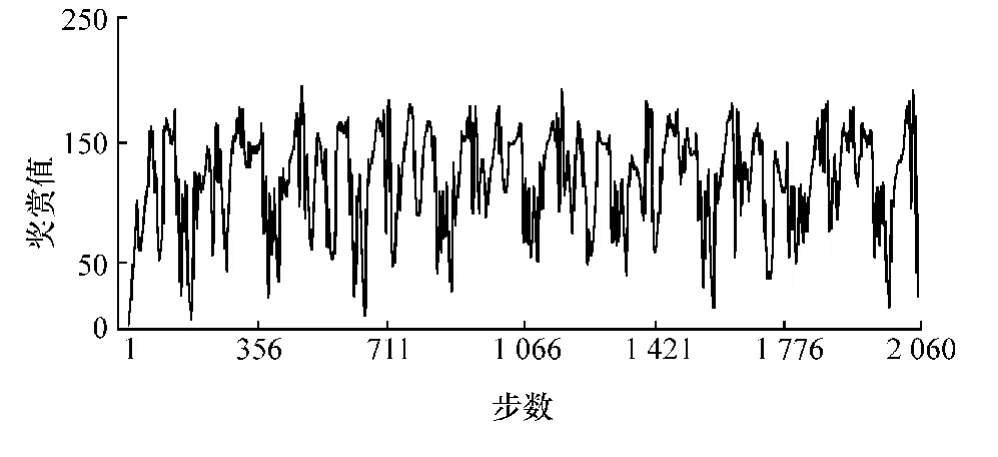
图6 每步奖赏值
3.2 情景二:动态障碍物
3.2.1 参数设定
在静态障碍环境训练后,添加其它竞争车辆作为动态障碍物,无人车不仅要躲避静态障碍物,还要躲避动态障碍物。
演员网络和评论家网络的构建方法与情景一类似,有两个隐藏层,分别有300和600个神经单元。3个输出变量的随机噪声参数如表5所示。

表5 随机噪声参数
参数的具体含义同表4,区别是将加速度的μ值从0.6减到0.4,制动的μ值从-0.1变到0.1,这是因为无人车需要更多的制动来躲避其它车辆。
3.2.2 实验结果
同样选择CG Speedway number 1赛道作为训练赛道,如图7所示。添加其它5辆车作为移动障碍物,由AI控制完成整条赛道的比赛,由于一些车辆比较极端,可能会撞到路边围栏,因此无人车应学习如何躲避这些事故车辆,不发生碰撞,获得最大奖励。在训练开始阶段,无人车无法有效躲避其它车辆,会发生碰撞,有时也会撞到道路边缘。经过多回合训练,逐渐提升性能,最终学会躲避静态障碍物和动态障碍物。
每回合的步数如图8所示。在实验开始阶段,每回合的步数小于100,无人车发生碰撞,重新开始训练。大约经过500个回合后,步数显著增加,表明无人车学到较好策略。

图7 训练赛道

图8 每回合步数
每回合的累计奖赏值如图9所示。在前400个回合,累计奖赏值较小,这与回合中的学习步数少有关。在500个回合左右,学习步数增多,累计奖赏值也变大。在700个回合左右,由于学习步数没有明显变化,累计奖赏值也保持一定值,随后随着步数的增加,累计奖赏值也增加。可以看出,累计奖赏值的变化趋势与学习步数的变化趋势保持一致。

图9 每回合累计奖赏值
每回合的平均奖赏值如图10所示。前400个回合,平均奖赏值都比较低,无人车处于学习状态。大约400个回合后,平均奖赏值开始增加,并且逐渐趋于稳定,表明无人车学习到较好策略。
当无人车在训练赛道上表现优异时,在赛道CG Track 2上进行验证,同样添加其它5辆车作为移动障碍物,如图11所示。

图10 每回合平均奖赏值

图11 验证赛道
每一步的奖赏值如图12所示,所有的奖赏值均为正值,表明没有碰撞发生。
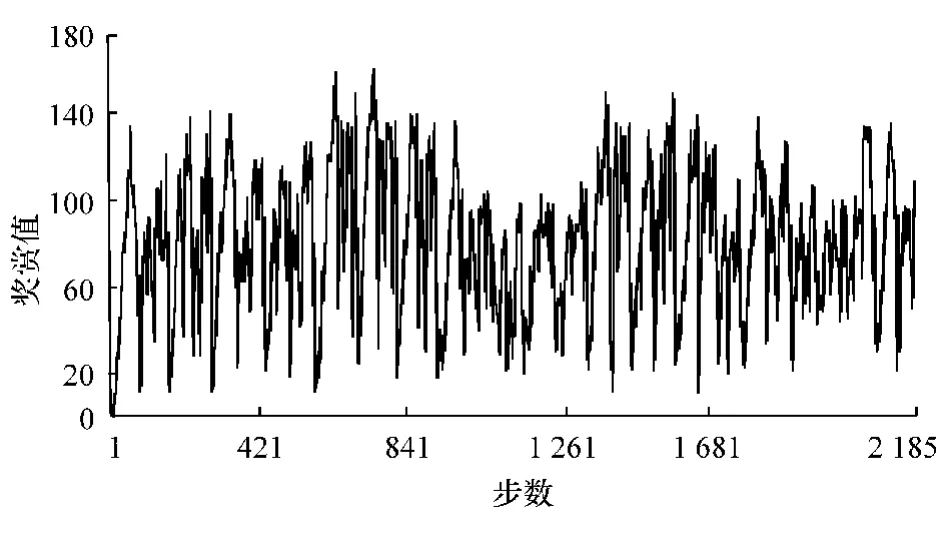
图12 每步奖赏值
4 结论
本文中将深度确定策略梯度算法应用于无人车避障策略,使无人车执行连续动作。算法中考虑车辆动力学约束和交通规则约束,使输出动作更合理有效。将障碍物分为静态障碍物和动态障碍物两大类,分别通过学习过程和测试过程来验证算法的有效性。首先在学习轨道上训练,经过足够多的训练回合后,在其它赛道进行验证学习效果。结果表明,该算法在无人车仿真平台TORCS中表现良好。