真空低温环境下的光纤分布式测温方法
2019-03-07田玉坤何钦华
乔 通,魏 鹏,田玉坤,何钦华,刘 佳
(1.北京强度环境研究所,北京 100076;2.北京航空航天大学,北京 100187)
0 引言
光纤温度传感技术是测温领域的新技术,也是工业领域应用最多的传感技术之一。目前光纤温度传感器中较为成熟的有:光纤辐射型温度传感器、光纤荧光型温度传感器、半导体吸收型温度传感器、光纤热色型温度传感器、光纤偏振型温度传感器、光纤外差干涉型温度传感器等[1]。这些温度传感器通常都是“点”式温度测量,即在传输光纤的末端用其他温度敏感元件作为传感器构成传感系统,光纤在整个系统中作为信号传输手段。点式测量型的光纤温度传感器只能测量感温元件附近一小区域的温度,不能满足仓库、管道等场合的温度分布监测需求。
分布式光纤测温技术,是利用光纤本身作为温度传感器来测量光纤沿线几公里甚至几十公里的连续空间的温度场分布情况,为大范围、复杂几何空间结构、强电磁场、高压大电流、易燃易爆、强腐蚀性和高温、真空低温等特殊环境的温度场测量与控制,提供了良好技术手段。在众多的分布式光纤测温技术中,基于后向拉曼散射原理的分布式光纤测温技术[2],由于其拉曼散射信号只对温度灵敏,不存在串扰问题,避免了复杂的信号分析。
基于光纤拉曼散射原理,在真空低温罐内合理布设光纤温度传感器,监测液氮冷却后罐内热沉温度场分布,验证了该方法在低温环境下的温度监测的可行性。
1 光纤拉曼测温原理
光纤中的后向拉曼散射光(Anti-stokes)的光强只对环境温度变化敏感,对其他环境因素变化不敏感。并且由于光纤中的后向拉曼散射光的频率(或波长)与入射光的频率或波长相差比较大,比较容易分离。将其与光时域反射技术相结合,即得到分布式光纤拉曼测温技术的基本原理[3]。激光器输出的脉冲光入射到传感光纤中,在传感光纤不同位置处产生的后向散射光经过不同的延迟时间后,返回到传感光纤的入射端。将后向散射光中与环境温度信息相关的后向拉曼散射光分离出来,再通过具有高灵敏度的光电探测器对其进行信号采集,可得到后向拉曼散射光的强度信号与时间的关系,即可解调出传感光纤沿线的环境温度[4]。
设入射光频率为ν0(Hz),光强为I0(lm),在距离传感光纤入射端z(m)位置处发生散射现象,返回到传感光纤入射端的瑞利散射光强度为:

式中:S为光纤的后向散射因子;Kr为瑞利散射的散射截面系数;α0(x)为入射光在光纤中传播时的衰减系数。
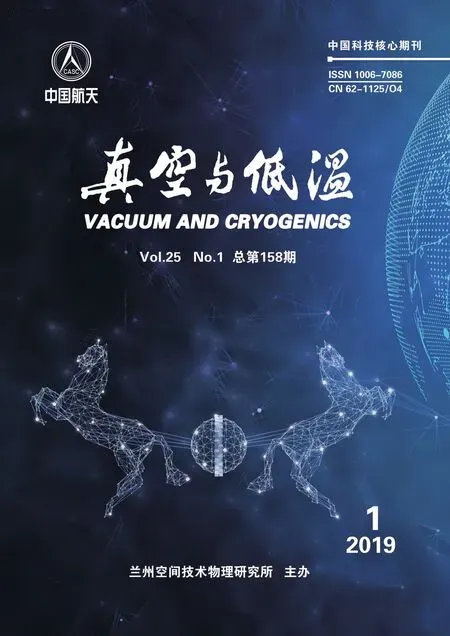
设拉曼散射的频率漂移量为Δν,则Anti-Stokes拉曼散射光的频率νas和Stokes拉曼散射光的频率νs分别为:

在距离传感光纤入射端z(m)的位置处发生拉曼散射现象,返回到传感光纤入射端的Anti-Stokes拉曼散射光的强度Ias和Stokes拉曼散射光的强度Is分别为:

式中:Kas和Ks分别为Anti-Stokes拉曼散射光和Stokes拉曼散射光的散射截面系数;S为光纤的后向散射因子,Γas=KasS和Γs=KsS分别为Anti-Stoke拉曼散射光和Stokes拉曼散射光的散射捕捉率;αas和αs分别为Anti-Stokes拉曼散射光和Stokes拉曼散射光在传感光纤中传播的衰减系数;Rs(T)及Ras(T)分别为Stokes拉曼散射光与Anti-Stokes拉曼散射光光强比系数,与温度T有关,其表达式如式(5)~(6):
式中:T为温度,K,取Planck(普朗克)常量h=6.63×10-34J·s,Boltzmann(玻尔兹曼)常量k=1.38×10-23J/K,拉曼散射光的频率漂移量为Δν=13.2×1012Hz。若只考虑环境温度变化,而忽略其他环境因素对后向拉曼散射光强的影响,将温度在300 K以下时的拉曼散射光强设为1,其他温度下的光强都相对于300 K时的拉曼散射光强做归一化处理,得到如图1所示的结果。可见环境温度变化对Anti-Stokes拉曼散射光强的影响较大。因此用Anti-Stokes拉曼散射光强来解调温度的效果比较好。

图1 光强随温度的变化图Fig.1 The change of light intensity with temperature
利用光时域反射技术和光纤中拉曼散射光的温敏效应,选用合适的温度解调方法,即获得传感光纤沿线的温度-位置关系,进而得到温度场分布[5]。这是分布式光纤拉曼测温技术的基本原理。
2 分布式光纤拉曼测温系统组成
分布式光纤拉曼测温系统由解调机箱、标定机箱和传感光纤三大部分组成。分布式光纤拉曼测温系统的解调机箱负责发射激光脉冲信号并对传感光纤的后向拉曼散射光信号进行探测和处理;标定机箱负责实现系统对标定光纤环境温度的采集,并对光纤参数进行实时在线标定;传感光纤是系统的温度传感器。硬件系统的整体结构如图2所示。

图2 硬件系统结构示意图Fig.2 Schematic diagram of hardware system
图2中,高速脉冲光源发出中心波长为1 550 nm的激光脉冲,经过光纤波分复用器后入射到标定光纤和传感光纤中;激光脉冲在标定光纤与传感光纤中产生的后向散射光,在经过传感光纤和标定光纤返回到光纤波分复用器后,被分离出中心波长为1 663 nm的Stokes拉曼散射光和中心波长为1 450 nm的Anti-Stokes拉曼散射光。这两路后向散射光信号分别从两个接口进入系统的雪崩二极管(Avalanche Photo Diode)光电探测模块,被转换为电信号,再由系统的高速数据采集卡将该电信号采集进嵌入式计算机中,在计算机中进行温度解调与显示、储存。为了使光源发出的激光脉冲与采集卡的采集累加同步进行,同步触发信号由光源发出,采集卡根据该触发信号进行同步数据采集。标定光纤的环境温度由铂电阻温度传感模块实时采集,其测温精度为±0.1℃。铂电阻温度采集模块通过RS232接口将采集到的温度信息传输到嵌入式计算机中。
3 真空低温环境温度监测试验
分布式光纤拉曼测温真空低温环境试验在KM3空间环境模拟设备中进行,设备制冷方式为液氮制冷,罐内热沉温度可低于100 K,真空度为5×10-5Pa,具体参数如表1所列。此次试验主要目的是测量KM3空间环境模拟设备内热沉表面的温度分布情况,检验分布式光纤拉曼测温系统对低温环境测量的稳定性和可靠性。

表1 KM3真空热试验设备技术参数Table1 Technical parameters of vacuum thermal test equipment
由于空间环模设备中的温度低于100 K,接近液氮温度,为了保证在这种低温环境中,系统传感光纤能够正常传输光强信号,并能够准确测量出温度信息,需要选用耐低温、传输信号强的传感光纤。铁氟龙(聚四氟乙烯)材料长期工作温度下限可以达到77 K,高温可达533 K。另外多模光纤内的散射光信号强度比单模光纤强很多,其抗弯曲性能也比单模光纤好。因此可选用铁氟龙保护材料的多模传感光纤进行试验。
试验中,将系统的传感光纤敷设在KM3空间环模设备的热沉表面,使用3M胶带对其进行粘贴固定,并保证传感光纤不出现过小的弯曲半径。空间环模设备结构示意图如图3所示。

图3 空间环模设备结构示意图Fig.3 Schematic diagram of vacuum cryogenic tank
在图3中,罐外传感光纤与穿罐光纤熔接并通过穿罐法兰进入罐内,再与罐内传感光纤进行熔接,由于熔接点相当于光纤上的损伤,在低温下会增加光的损耗,因此把熔接点放置在外壁与内壁热沉之间的的保温夹层内。穿罐光纤为带铠甲和橡胶保护层的光纤如图4所示。

图4 系统使用的穿罐光纤图Fig.4 Tank optic fiber in system
罐内传感光纤从罐内左侧开始分布粘贴在热沉表面,然后从导轨下方热沉与罐体外壁中间的夹层中引到罐体右侧的热沉表面再进行分布粘贴。传感光纤在热沉表面的分布粘贴如图5(a)、(b)所示。在热沉重点监测位置处,传感光纤绕成光纤环进行重点监测,其他区域呈“Z”字形分布。

图5 传感光纤在罐内热沉表面的分布图Fig.5 Distribution of sensing optical fiber on heat sink surface in tank
试验过程中,热沉内加注液氮降温,同时罐内的红外加热源工作,使罐内产生温度梯度,用分布式传感系统检测罐内热沉温度场分布情况,验证分布式传感系统的测温效果。
4 试验结果
图6为热沉温度稳定时,光纤拉曼测温系统给出的温度-位置曲线图。传感光纤共长282 m,每段光纤的作用及分布如表2所列。由于光电探测器的采样率和响应时间限制,短距离内无法区分Stokes和Anti-Stokes散射光。因此,预留无法正常测温的前80 m,视为盲区。由于穿罐法兰直接跨过真空罐内外壁间的夹层,所以带铠装和橡胶保护的一段光纤首先接触到热沉,然后再把后面的熔接点和备用光纤环0折回放入夹层内。

图6 热沉温度稳定时系统温度-位置曲线Fig.6 System Temperature-position curve at the stable heat sink temperature

表2 光纤与真空罐的相对位置分布Table2 Relative position distribution of optical fiber and vacuum tank
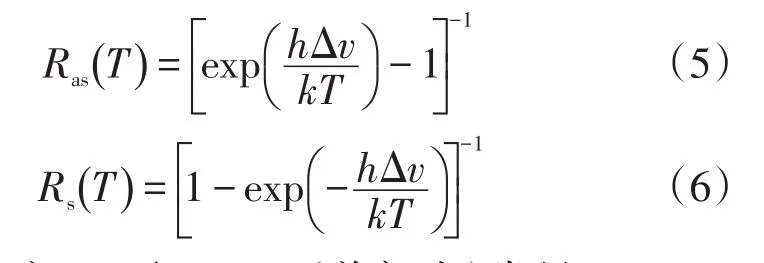
计算系统测量的真空低温时的温度分辨率,系统传感光纤200 m位置处在低温稳定时测得的一组温度数据如表3所列。
表3 系统测得的温度值Table3 Temperature results measured by the system
计算温度值的标准差为:σ=0.193 2,系统的温度分辨率为:3σ=273.58 K。图7为温度-位置曲线的局部放大图。根据系统空间分辨率的定义,温度从263 K降到113 K,所需的距离为1.5 m(165.5 m至167.0 m),即系统的空间分辨率为1.5 m,在时间分辨率和单通道测量距离要求不高的情况下,系统的空间分辨率可进一步提高。

图7 温度-位置曲线局部放大图Fig.7 Partial enlargement of temperature-position curve
5 结论
基于光纤拉曼测温原理,将光纤拉曼测温系统应用到空间环模设备中热沉温度场的分布监测,验证了该系统测量低温下的环境温度的可行性。与传统的点式测温相比,该线式测温技术更适用于特殊环境温度场分布监测,并可长时间在线监测。可以进行组网测量,温度监测的实时性取决于组网传感器的数量、光开关的切换速度和数据采集处理系统的处理速度。后续可以通过减小激光光源带宽、提高光电转换和A/D转换速度,实现空间分辨率的进一步提高。