一种自动静脉穿刺器的设计与应用*
2019-03-07张鹏飞王燕青
张鹏飞 张 硌 张 鹏* 王燕青
在临床工作中,静脉穿刺是一项重要的介入式治疗方法,早期静脉穿刺完全依赖医护人员的经验,随后的图像处理技术的发展为可视化引导下的人工穿刺奠定了基础,如高速投影式血管显像仪和塞丁格穿刺法[1-2]。高速投影式血管显像仪为医护人员提供了穿刺静脉血管的平面图,但仍需护士徒手实施静脉穿刺,且护士对穿刺深度难以控制。而塞丁格穿刺法,虽可将PICC管送入中心静脉,解决长期输液患者静脉穿刺的问题。然而,高速投影式血管显像仪和塞丁格穿刺法穿刺操作程序繁琐,耗费时间较长,患者血栓发病率高,无法解决普通输液和抢救所需的静脉穿刺成功的要求。
为解决护士穿刺手法稳定性的问题,逐步提出的半自动静脉穿刺仪和全自动静脉穿刺的研究[3-4]。全自动静脉穿刺系统尚未研制出样机,且该系统实现静脉穿刺需多种仪器共同完成,体积庞大不能便携。而自动静脉穿刺机器人是在血管弯曲时,可实时调整进针角度用于抽血[5]。机器人Veebot[6]可通过红外线找到血管,超声检验血管后校准针头刺入血管,其精准度达83%。但该仪器体积庞大,机器不能做到无菌性操作,成功率低。目前,国内外尚无应用留置针进行穿刺输液的全自动的静脉穿刺仪器。因此,本研究时机研制一种自动静脉穿刺器,可应用于野外、夜晚、战场、自然灾害等特殊环境中。
1 自动静脉穿刺器的设计方案
本研究设计的自动静脉穿刺器是利用B超识别静脉血管后,将数据传送至图像采集系统,图像采集系统将采集到的静脉血管深度、直径及所用导向块角度等信息计算出进针长度并转换为进针脉冲数,用串行接口传输至进针控制器,控制器根据初始位置,计算出刺入皮肤的距离进行加速度控制并以最快速度刺入皮肤,之后以慢速控制针头刺入血管的2/3处,停止并推送留置针进入血管,连接输液接头,并给予冲管,贴敷料固定,完成静脉穿刺,从而进行输液给药。
1.1 自动静脉穿刺器的结构
本研究研制的自动静脉穿刺器是一种简易化、自动化的仪器,其能够准确、快速地识别目标血管,进行静脉穿刺[7]。自动静脉穿刺器由简易B超机、图像采集系统和驱动系统三部分组成。但为了实现仪器的便携和小型化,本研究将B超机与图像采集系统进行了集成,因此,该仪器主要由图像采集系统和驱动系统两部分组成。
1.2 图像采集系统
仪器图像采集系统通过采集超声探头在欲穿刺区域的运动和对应的超声图像,运用仿真软件对欲穿刺区域的血管分布进行建模[8]。图像采集系统自动识别超声图像中的穿刺靶目标,并结合超声系统内部成像参数确定穿刺靶目标的物理位置。图像采集系统可采集5000余张静脉血管照片,其中图像采集系统确定目标血管的物理位置与专家手工标注的结果误差<5像素(如图1所示)。
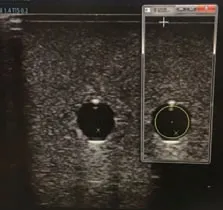
图1 图像采集系统超声影像图
1.3 驱动系统
仪器进针驱动系统所用的驱动元件为微型步进电机,通过丝杠螺母副将旋转运动转换为直线运动[9-10]。所选用步进电机驱动芯片具有最大128细分功能,使得脉冲当量<0.01 mm。主控制器芯片具有脉冲宽度调制(pulse width modulation,PWM)模块和脉冲计数模块。图像识别系统通过静脉血管深度、直径及所用导向块角度计算出进针长度,并转换为进针脉冲数,将脉冲数据用串行接口发给进针控制器,控制器根据初始位置计算出刺入皮肤的距离,进行加速度控制并以最快速度刺入皮肤后再以慢速到位准确停止。操作人员见血管回血后,将留置针软管向前推送至导针器处,并向机械臂下达针退指令,退出留置针内的钢针,操作人员将剩余软管推入血管内,完成穿刺。
2 自动静脉穿刺器的研制
随着B超机的发展,研制的自动静脉穿刺器可实现小型化,为便携式静脉穿刺设备的研发奠定基础。技术成熟后,可将其应用于临床、重症监护室及急诊,配备于急救车以及应用于输液及输血、动脉采血、组织取样等操作中。在此基础上,拟研制超声实时引导下静脉穿刺仪器,可将其应用于狭小空间(地震塌方等)及战时核化生病房或传染性疾病等,护士不能近距离接触患者进行静脉穿刺的操作中。目前,本研究已完成第一代试验样机和第二代试验样机的研制。
2.1 第一代试验样机
研制的第一代试验样机尚未将图像采集系统软件嵌入至B超主机中,使用前需将B超机、图像采集系统和驱动系统连接。在使用过程中需要根据目标血管信息选择安装导针架型号0.5 cm、1 cm及1.5 cm,使用步骤较繁琐(如图2所示)。
2.2 第二代试验样机

图2 第一代自动静脉穿刺器操作示图
本研究与无锡海鹰公司合作研制的第二代仪器,将图像采集软件嵌入至B超机中,驱动系统可根据图像采集系统传输的数据自动选择进针角度,并且该仪器增加了纠偏系统,在进针过程中,若血管发生偏移,驱动系统可根据纠偏系统提供的数据进行自动纠偏,以保证进针准确性(如图3所示)。
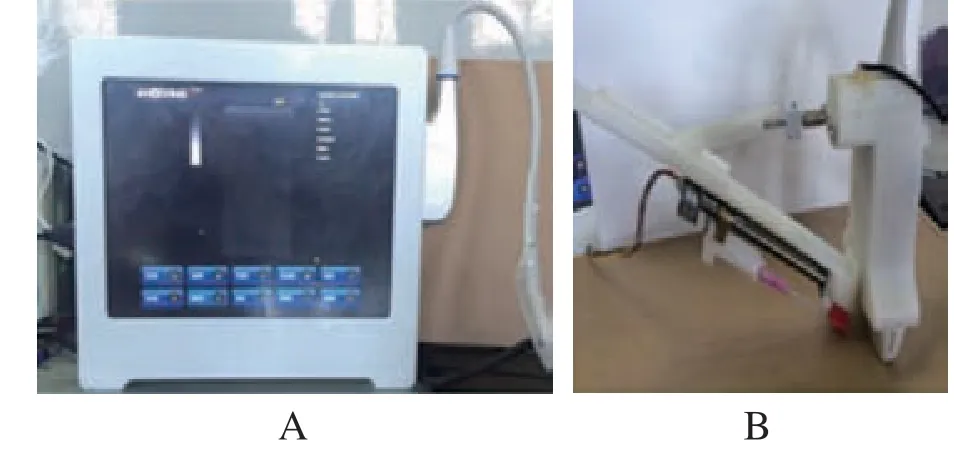
图3 第二代自动静脉穿刺器示图
3 自动静脉穿刺器的应用预试验
3.1 穿刺预试验方法
选取56例癌症复发患者,采用数表法将其分为仪器穿刺组和人工穿刺组,每组28例,采用第一代试验样机对两组患者进行临床预试验。由于两组均为癌症复发患者,其浅表静脉血管肉眼可视性差,在临床预试验中所有的人工穿刺均由有3年静脉穿刺经验的护士实施,针尖进皮肤后至确认穿刺成功,观察两组穿刺成功率。
3.2 穿刺预试验成功率
自动静脉穿刺器能够准确地找到目标血管,并完成静脉穿刺。仪器穿刺组穿刺成功26例,穿刺成功率为92.8%(26/28);人工静脉穿刺成功为0,仪器穿刺组穿刺成功率显著高于人工穿刺组,且具有很高的稳定性。
4 结论
自动静脉穿刺器的研制对临床工作具有重要意义,研制成功后可为护士徒手穿刺的单一方式提供了一种便捷、高效的方法,可解决人工穿刺对医护人员经验依赖的问题,克服医护疲劳、手抖动和手眼协调问题等引起的操作误差, 提高穿刺的精准性和稳定性,且降低医护人员由穿刺引起的感染风险。
自动静脉穿刺气穿刺成功率较高,可降低护士凭经验、盲穿可能对患者多次穿刺带来的痛苦和经济负担;可为野外、夜晚、战场、飞机舰艇、自然灾害(地震、事故)环境等复杂环境下需要紧急建立通路给药,赢得更多的抢救时间。
