最大化有向传感网络寿命的目标覆盖算法
2019-03-06朱晓珺
喻 林,朱晓珺
(1.郑州财税金融职业学院 信息技术系,河南 郑州 450048;2.郑州信息科技职业学院 信息工程学院,河南 郑州 450000)
0 引 言
有向传感网络(Directional Sensor Networks, DSNs )就是利用传感节点感知的有向性建立的无线网络[1-3]。在DSNs中,传感节点有方向性地感测环境数据,并将数据传输至信宿(Sink)。与全向(Omni-directional)传感节点不同,有向传感节点具有方向性,并且每个方向的感测区域呈扇形状。DSNs通过传感节点感测的有向性,提高了通信资源的使用率,并降低了对其他网络的干扰,也满足了不同目标覆盖的差异怀。目前,DSNs已广泛应用于各类监测领域。这些应用的关键在于如何有效地对覆盖目标进行覆盖,即目标覆盖控制问题。
近期,研究人员对DSNs的覆盖控制进行大量的研究工作。所谓覆盖控制就是以尽量少的传感节点数实现区域的最大覆盖[4]。然而,文献[5-6]已证实,覆盖控制是NP问题,只能获取次优解[7]。因此,覆盖问题成为DSNs复杂问题之一,其主要涉及传感节点工作时间的选择以及它们感知方向(Sensing sectors)的决策,进而延长网络寿命。
目标覆盖是DSNs的基础,已成为DSNs的研究热点。不同的目标可能具有不同的重要性,因此,它们的覆盖要求不尽相同。例如,智能交通系统(Intelligent Transportation System, ITS)中的交叉路口的流量监控覆盖,相比其他监控覆盖点,具有高的覆盖要求。高性能的监控覆盖性能取决于二值扇形模型。所谓扇形模型是指:如果目标在传感节点的感测覆盖区域内,就认为目标被传感节点覆盖[7-8]。文献[7-8]中,作者提出了不同的算法解决目标覆盖问题,但是它们是假定所有目标具有相同的覆盖重要性。此外,文献[9-11]利用基于Voronoi单元划分,优化活动节点,进而提高覆盖性能。
然而,这些算法均是采用二值扇形模型。但是,对于给定目标,传感节点的感测质量完全取决于它们之间的距离和信号衰减率[12-13]。在文献[12]中, 利用关于传感节点离目标间的距离函数,对覆盖目标质量进行量化,并将网络内所有节点划分多个不相交覆盖集,致使每个覆盖集能满足目标的覆盖要求。同时,引用最大网络寿命分配(Maximal Network Lifetime Scheduling, MNLS)算法,优化覆盖集的工作时间,进而最大化网络寿命。类似地,文献[13]提出面向目标可靠性的有向覆盖集(Directional Cover-set Considering Coverage Reliability, DCCR)算法。DCCR算法利用信号衰减因子建立目标覆盖质量,并通过优化不相交覆盖集,最大化网络寿命,同时满足所有目标的覆盖要求。
然而,在真实环境中,目标检测存在不准确性和异构性,并且多数目标服从概率模型[14]。如果不联合考虑节点的剩余能量和覆盖质量,则很难提高网络寿命。原因在于:不同传感节点的能量消耗率存在较大的差异性。此外,如何分配覆盖集的工作时间,对网络寿命有直接的影响。
为此,本文提出覆盖质量感知的最大化网络寿命(Coverage Quality aware-based Network Lifetime Maximization,CQ-NLM)算法,提高覆盖质量和网络寿命。CQ-NLM算法的主要目的就是以最小的活动节点数最大化覆盖质量,并且这些活动节点数能满足异构覆盖质量。实验数据表明,提出的CQ-NLM算法能够有效地提高网络寿命。
1 系统模型及假设
假定在监测区域内有N个传感节点,且它们随机分布于区域Ω内。这些传感节点实时地感测环境数据,并将数据传输至信宿。一旦部署了,这些传感节点不再移动,即属于静态节点。此外,考虑同构网络,节点具有相同的感测半径Rs和初始能量E0。此外,传感节点具有活动和休眠两种状态,并且能自行切换。
DSNs中每个传感节点有感测和通信功能:


图1 有向传感节点模型
(2)每个传感节点的通信半径为Rc,且Rc≥2Rs[15]。通信的角度为θc,0≤θc≤2π。
此外,假定网络内存在M个目标,且它们的位置已知。N个传感节点随机分布于监测区域,并通过高密度部署,获取高的覆盖率。每个目标具有预定的覆盖质量,且表示为γ(mk),其中mk表示第k个目标。
2 CQ-NLM算法
CQ-NLM算法目的就是使用最少的传感节点数获取高的覆盖质量。为此,CQ-NLM算法利用混合整数线性规划(Mixed Integer Linear Programming,MILP)建立目标函数[16]。然后,由目标函数建立候选集,并由候选集节点覆盖目标。一旦候选集的寿命耗尽,信宿再选择新的候选集。此外,本文引用如表1所示的标识符。
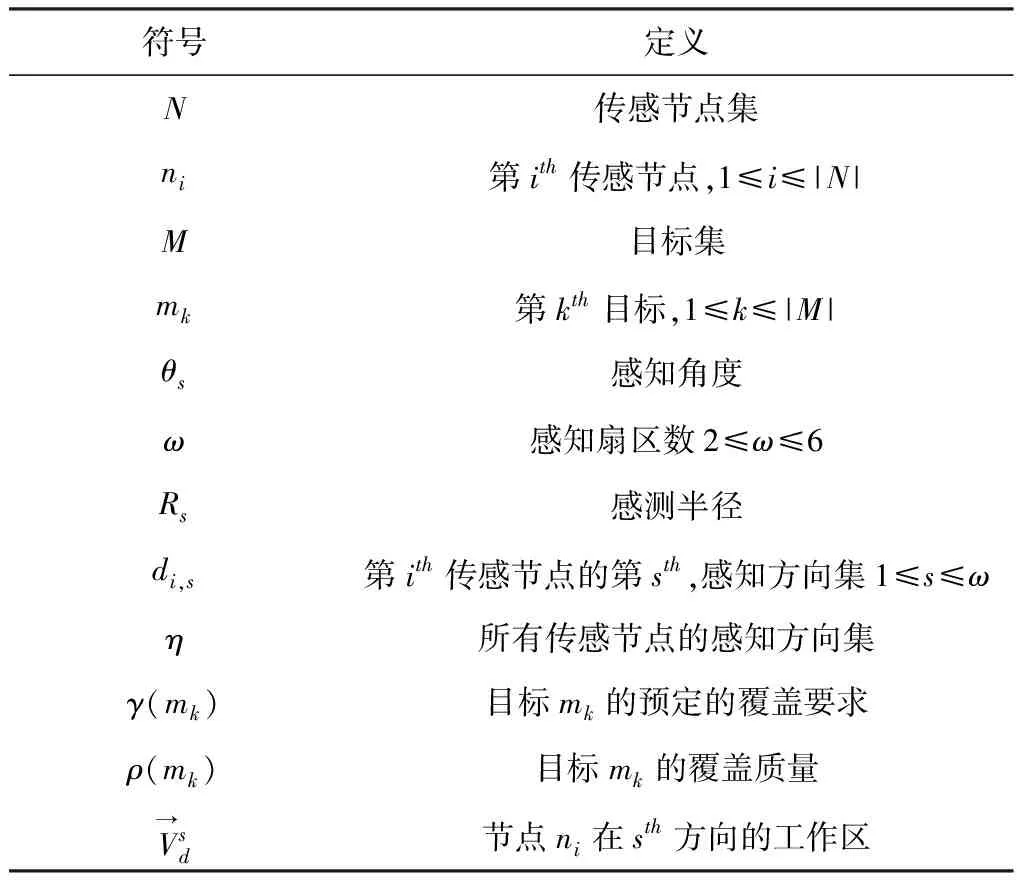
表1 标识符
2.1 标的覆盖质量

为了判断在传感节点ni的sth扇区内是否存在目标mk,使用TIS算法[5]。如果目标mk离传感节点ni的距离小于Rs,并且在其感知扇区内,则将传感节点ni的sth扇区纳入ξmk,如式(1)所示:
ξmk←di,s, ifD(ni,mk)≤Rs
(1)
其中D(ni,mk)表示传感节点ni离目标mk的欧式距离。
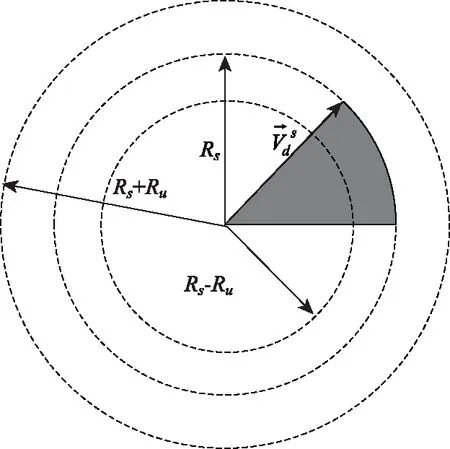
图2 目标的概率覆盖
利用文献[14]所示的概率覆盖模型,可将由传感节点ni的sth扇区所覆盖目标的覆盖质量σi,s(mk)表示如式(2)所示:
(2)
其中Ru表示感测误差。而α=D(ni,mk)-(Rs-Ru)。λ、β分别参数,用于测量检测概率。
引入变量χ,其表示传感节点集,集内的节点感知扇区能够覆盖目标mk。假定有p个传感节点的感知扇形能覆盖目标,则χ={ni|i=1,2,3,…,p}。
因此,累加覆盖目标mk的覆盖质量ρ(mk)如式(3)所示:
(3)
2.2 目标函数
首先建立候选集ψ,其为传感节点的感知扇区η的子集,即ψ⊆η。候选集ψ内节点能够覆盖目标,并且满足每个目标mk的覆盖要求γ(mk)。
然后,再计算候选集ψ的寿命。本文从节点能量定义候选集ψ寿命。如果传感节点ni的初始能量为E0,剩余能量为Er(i),并且能量消耗率为δ(i),则传感节点ni的剩余寿命为:
(4)
依据式(4),可得候选集ψ的寿命τ,如式(5)所示:
τ=min{ζi|di,s∈ψ}
(5)
从式(5)可知,候选集ψ的寿命等于集内节点的最小寿命。
在建立目标函数之前,先引入二值变量bi,s,其值反应了传感节点ni的扇区di,s是否在候选集ψ内。
(6)
CQ-NLM算法的目的就是以最少的传感节点实现覆盖目标的最大化。为此,就是寻找最小的候选集ψ,进而满足覆盖要求。利用MILP所建立的目标函数如式(7)所示:
(7)
那式(7)的约束条件如式(8)~式(11)所示:
∀di,s∈ψ,ψ⊆η
(8)
式(8)确保了在特定候选集内每个节点只有某一个扇区是活动状态,其他扇区是休眠的,这有利于网络寿命的提高。
ρ(mk)≥γ(mk), ∀mk∈M,1≤k≤|M|
(9)
式(9)保证了每个目标都被覆盖,并满足覆盖要求。即有足够的节点最监控目标。
∀mk∈M,1≤k≤|M|
(10)
式(10)保证了满足每个目标的覆盖要求。即每个目标的覆盖质量大于或等于目标预定的覆盖质量。
Er(i)≥Eth,di,s∈ψ,ψ⊆η
(11)
式(11)保证:仅当节点的剩余能量大于能量阈值Eth,该节点才能加入候选集ψ。
对于能量阈值,采用局部均值算法求解能量阈值。将每个扇区内所有节点的平均剩余能量作为能量阈值。当然,计算扇区内节点平均剩余能量存在一定的计算量和通信量,这必然会引起额外的能耗,但这一定是小于本算法所节省的能量,总体仍能够提高能量效率,最终延长网络寿命。后续的实验数据可证实。
依据这些上述约束条件,通过求解目标函数,实现覆盖目标最大化,并延长网络寿命。
3 系统仿真及性能分析
3.1 仿真环境及性能指标
为了更好地分析CQ-NLM算法性能,利用离散事件仿真器NS-3建立仿真平台。有向传感节点和目标均匀地分布于160×160 m2区域。每个节点的初始能量为E0=6 J。预定的覆盖质量ρ从0.1至0.9变化。其他的仿真参数如下:ω=4、λ=1、β=0.5、Rs=50 m、Ru=25 m。仿真时间为1000 s,每次仿真独立重要50次,取平均值作为最终的仿真数据。
选用覆盖率和网络寿命作为评估算法的性能指标。覆盖率等于覆盖面积占总体面积的比率。覆盖率越高,表明DSN网络性能越优。网络寿命表示从部署传感节点开始至DSN内第一个节点失效的时间差。
为了更好地分析CQ-NLM算法的性能,选择同类的MNLS[12]和DCCR[13]作为参照。主要分析它们的覆盖率、网络寿命以及活动传感节点数。其中覆盖率等于覆盖面积占总体面积的比率,覆盖率越高,算法性能越好。而网络寿命是指从网络部署开始至第一个传感节点失效的时间差。
3.2 仿真结果及分析
首先分析传感节点数对网络寿命和活动节点数的影响。目标数M=25,传感节点数从55至80变化,仿真数据如图3所示。
从图3(a)可知,网络寿命随传感节点数的增加而上升。这主要是因为传感节点数的增加,增加网络的总体能量,进而延长了网络寿命。与MNLS和DCCR相比,CQ-NLM算法的网络寿命得到有效提高。原因在于:这主要是因为:MNLS和DCCR并没有优化活动节点数。同时,在选择传感节点数,忽略了覆盖集的剩余能量。而CQ-NLM算法考虑了节点剩余能量,进而延长了网络寿命。与MNLS和DCCR相比,CQ-NLM算法的网络寿命平均延长低于10秒。原因在于:CQ-NLM算法计算能量阈值也需要消耗能量,降低了一定的网络寿命。
图3(b)显示了各算法的活动节点 数。由于CQ-NLM算法通过混合整数线性规划,降低了传感节点数。因此,活动节点数的百分比小于DCCR和MNLS。
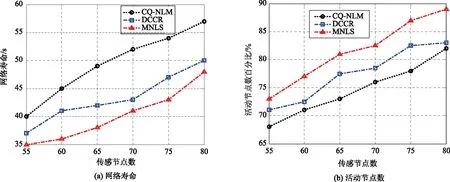
图3 传感节点数对网络寿命和活动节点数的影响
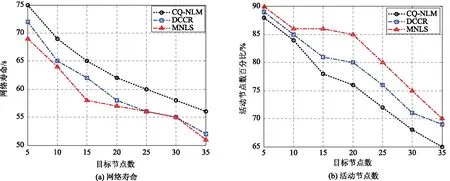
图4 传感节点数对网络寿命和活动节点数的影响(N=80)
然后 分析目标数对网络寿命的影响,其中传感节点数N=80,目标数从5至35变化,仿真数据如图4所示。
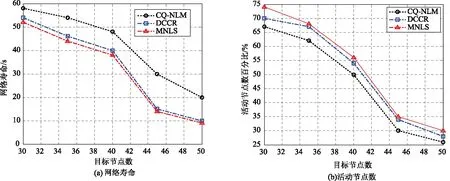
图5 传感节点数对网络寿命和活动节点数的影响(N=50)
从图4(a)可知,随着目标数的增加,网络寿命逐渐下降。原因在于:目标数越多,需要越多的活动传感节点去覆盖目标,进而缩短了网络寿命。与MNLS和DCCR相比,CQ-NLM算法的网络寿命得有效地提高。图4(b)具有与图3(b)类似数据,由于CQ-NLM算法减少了传感节点数量,降低了活动节点数。
再分析恶劣环境:目标数多而传感节点数相对较少的情况。在本次实验中,目标数从30至50变化,传感节点数为50,实验数据如图5所示。
从图5(a)可知,当节点数为50时,目标数的增加,导致网络寿命的急剧下降,原因在于:目标数越多,需要更多的传感节点覆盖目标。而传感节点数一定,这就需要更多的传感节点参与目标覆盖,加大传感的工作时间,进而增加了传感节点的能耗,进而降低了网络寿命。而图5(b)的数据进一步说明目标数的增加,导致更多的节点因能量消耗殆尽而无效,因此,活动节点数减少。特别是当目标数增加到40后,活动节点数急剧下降。
最后,分析节点部署方式对网络寿命的影响。在实验中,考虑均匀部署和随机部署两种方式。具体而言,在160×160m2区域内以均匀和随机部署80个传感节点,目标数从5至35变化。实验数据如图6所示。
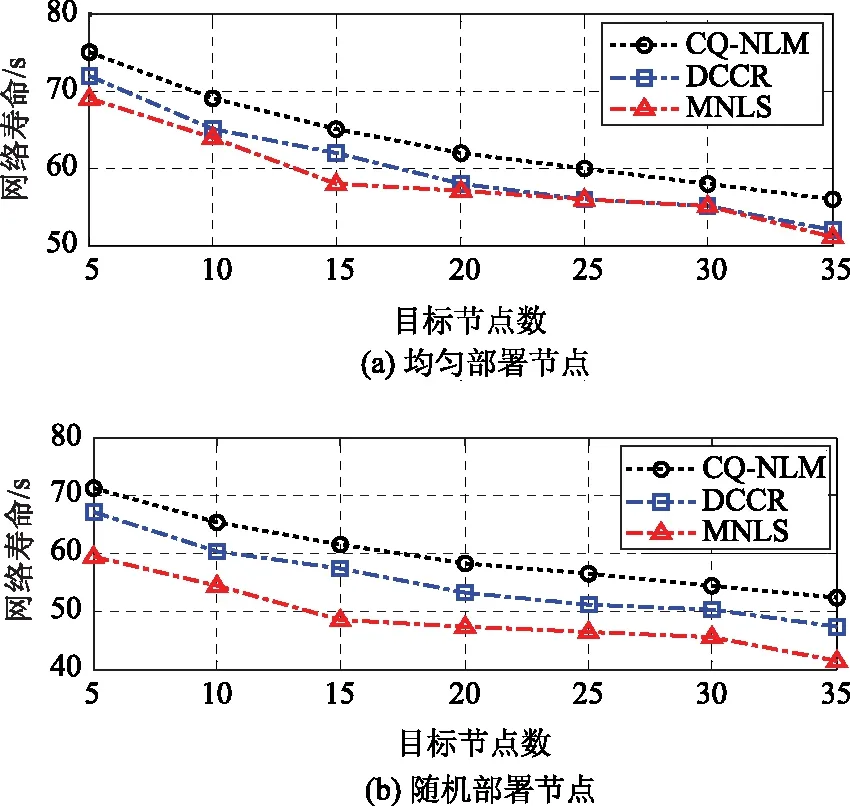
图6 网络寿命随节点部署方式的变化情况
图6(a)、6(b)分别描述了均匀部署、随机部署传感节点环境下三个算法的网络寿命。从图6可知,随机部署传感节点,降低了网络的总体寿命。原因在于:均匀部署传感节点,使节点分而更均匀,更有利于检测目标。而随机部署使得节点分布呈随机性,这不利于检测目标。因此,需要消耗更多的能量去检测目标,进而降低了网络寿命。
4 总 结
针对DSNs的目标覆盖问题,提出基于覆盖质量感知的最大化网络寿命CQ-NLM算法。CQ-NLM算法先利用概率感测模型,计算每个目标的覆盖质量。然后,建立目标函数,再利用MILP优化网络寿命,通过以最少的传感节点数,实现覆盖最大化。仿真数据表明,提出的CQ-NLM算法有效地提高网络寿命。