基于LBM-LES方法两栖水翼航行器水动特性分析
2019-03-06冯欢欢刘勇王琦邹森
冯欢欢,刘勇,王琦,邹森
(南昌航空大学 飞行器工程学院,南昌 330063)
0 引 言
两栖航行器是指能够多次跨越水空界面的航行器,它具有持续航行、重复利用、高隐蔽性、快速突防能力等优点,以及具有水面快速航行、水下潜行的两栖特性[1-2]。近年来,两栖航行器作为一种海上力量倍增器不仅有着广泛而重要的军事用途,还是人类和平开发海洋不可或缺的重要工具。因此,无人水下航行器备受各国青睐,现已成为各发达国家军事海洋技术研究的前沿[3-5]。法国的DCNS公司于2010年推出一种可同时进行水面和水下行动的新概念潜艇SMX-25(又叫两栖潜艇)[1]。与此同时,美国海军巴拿马城海岸系统站的工程人员就曾提出并实施了一种“潜水船”的概念研究,并进行了相关的实验研究。
研究与实践表明,现代水面舰艇的防空体系、水下防御系统以及各种预警系统的应用在对空和反鱼雷方面存在许多优势,从而大大降低了进攻型航行器的生存概率。因此,设计一种能够利用水空介质进行跨越航行,实现远距离隐藏侦察、打击的航行器具有重要的意义。
在传统的航行器的设计中,风洞、水动实验是获取一种新型航行器的主要途径。但是,传统的实验存在实验设备准备周期长、费用大、可重复性差、易受外界环境干扰等缺点。随着计算机技术不断地发展和进步,计算流体力学(Computational Fluid Dynamics,简称CFD)逐渐在流体力学研究领域成为一种重要的研究手段,它大大缩短了设计的周期,节省了设计费用,并且具有不受环境影响等优点。裴譞等[6]基于空气动力学和二元平面滑行理论建立了两栖UAV动力学模型并进行了仿真研究,为滑水优化和方案设计提供了理论依据和计算方法;J.V.N.de Sousa等[7]利用CFX对水下航行器的水动特性进行了数值计算,并分析了几何参数与阻力的关系;Sun C等[8]利用CFD代码研究了一种翼身融合的水下滑翔机的水动性能,根据仿真结果进行了流体力学设计的优化;A.K.Lidtke等[9]采用kT|k|ω过渡模型对一种新型水下航行器的水动特性进行计算,结果表明航行器的外形设计对机体减阻十分重要。
目前,国内外对于两栖航行器气动/水动特性的研究仍处于探索与发展阶段,对带有水翼的两栖航行器的水动特性研究尚无比较完善的理论依托。结合鱼雷及水翼船特点,本文提出一种可以改变外形的新型两栖水翼航行器,并基于LBM-LES方法对所提出的两栖水翼航行器外形进行数值模拟获取其动力特性,通过对结果的分析以希望对两栖水翼航行器的设计及进一步优化提供参考。
1 几何模型
在自然界中,水与空气两种流体的物理性质存在较大的差异。其中,海水的密度约是空气密度的833倍,动力粘性系数是空气的60倍。两种介质物理性质的不同造成现有水面航行器与水下航行器的外形设计存在较大的差异。外形不变的航行器在相同的速度下,水下航行产生的阻力远远大于水面航行产生的阻力。水面和水下较大的速度变化也对航行器的发动机提出了很高的要求,带有机翼的水下航行器在水中航行时需要保持低速以及较大的负迎角,这也造成了负迎角产生的诱导阻力和航行器本身的粘性阻力、压差阻力使得航行器不利于水中航行。
本文提出一种通过两侧向上折叠水翼改变外形实现水面、水下航行的两栖水翼航行器,兼顾水面快速航行和水中突防隐蔽性好的优点:在水下航行时,采用类似鱼雷的外形;在水面航行时,采用类似水翼船的外形。该航行器既具有情报收集、水下及水面侦察监视、作战打击等军事价值,同时也具有海洋研究、近海巡查等民用价值。航行器长度为2 m,横截面为六边形以便于水翼及支撑结构折叠后与航行器机身相融合,减小航行器因结构突兀造成的不必要阻力。航行器在水下航行状态时,水翼收起时折叠放入机身两侧的凹槽内,与机身融合呈类似鱼雷形态,其中在收起水翼后机身最大横截面外接圆直径为0.214 m。水面航行状态时,水翼展开后放入水中为航行器提供升力,其中航行器在水翼展开的状态下单侧翼展为0.18 m。利用CATIA根据以上参数建立航行器的几何模型,如图1所示,航行器密度略大于水为1 200 kg/m3,经计算航行器质量约为75.336 kg。
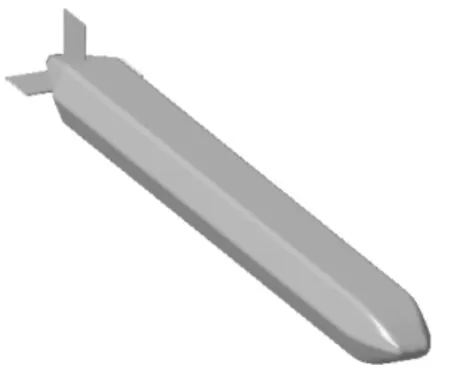
(a) 水中航行状态
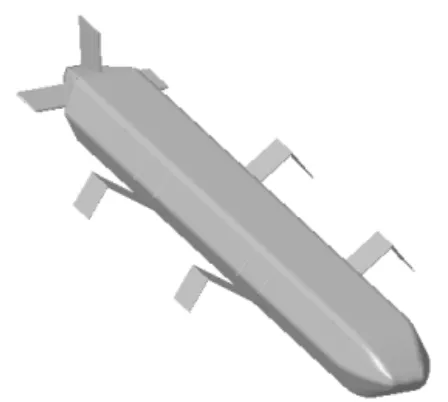
(b) 水翼收放变形过程状态
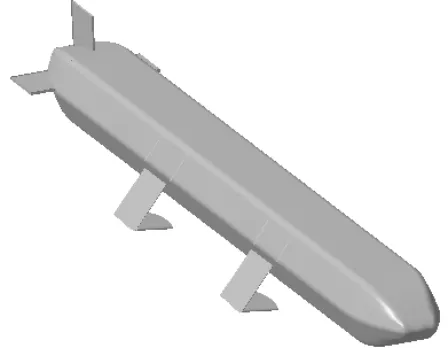
(c) 水面航行状态
2 数值方法
2.1 LBM方程
LBM(Lattice Boltzmann Method,离散格子玻尔兹曼)方程是一种用于复杂流体系统的相对较新的介观模拟方法。LBM法将粒子速度离散为有限维速度空间{e0,e1,…,eN},N为离散后速度的种类。速度离散后的玻尔兹曼输运方程如下:
(1)
式中:fα=fα(r,t)为t时刻r点处α方向上的粒子分布函数;eα为相应的离散速度;Ωα为碰撞算子;Fα为外力在α方向的投影。
为了求解式(1),需对其时间及空间离散,得到完全离散化的玻尔兹曼方程,并对其滤波,得
(2)
式中:“-”表示滤波。
采用多松弛时间算法[10],则碰撞因子Ωα可写为
(3)

(4)
本文LBM方法所采用的粒子模型为D3Q27模型[11],其权系数如下:
2.2 LES方法
LES(Large Eddy Simulation,大涡模拟)方法假定流体的小尺度涡具有相似性,因而可以用亚格子模型模拟它对大尺度涡的作用。亚格子涡粘性模型是大涡模拟方法应用最广泛的模型,只需要将涡粘度vt引入到小尺度涡的模拟,不会改变原来方程的结构以及求解方程的算法。标准的亚格子模型模拟流动近壁面行为存在一定的困难,而对于绕翼型流动,近壁面边界层流动非常重要,所以本文采用动态Smagorinsky亚格子模型[12]。亚格子涡粘性模型涡粘度vt可表示为
vt=CxΔ2|S|
(5)


2.3 网格与边界条件
为了减小计算域边界对结果的影响,计算域大小为30 m×20 m×20 m,流体入口距航行器顶端12 m,流体出口距离航行器顶端18 m。采用LBM-LES方法的格点分布如图2所示,网格较密的地方表示格点的尺度较小。计算采用尾迹自适应加密的方法,此方法根据每一个时间步长计算得到的涡量对粒子分布进行自适应动态加密,此方法在提高计算精度的同时没有过大的增加计算量。本文算例中流体入口边界类型为Velocity-inlet边界条件,出口边界类型为Convective-outlet边界条件,其余均为周期性边界条件。假定航行器航行深度为5 m,表压设定为151.54 kPa,计算域介质为海水。
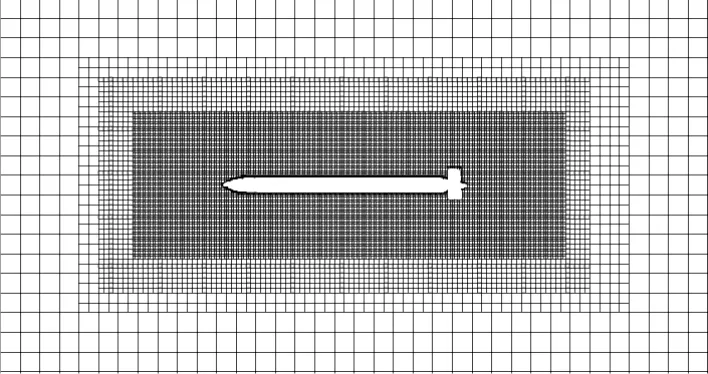
(a) 水中航行状态
(b) 水面航行状态
3 仿真验证与结果分析
3.1 仿真验证
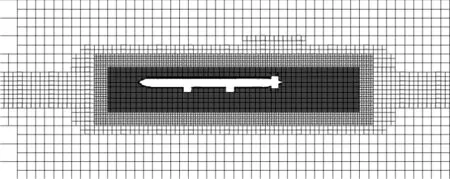
在进行水翼两栖航行器数值模拟之前,为了验证本文所采用LBM-LES方法对水中航行器仿真的准确性,对MK46鱼雷(如图3所示)在0°迎角、20.102 m/s条件下的受力特性进行仿真分析,结果如图4所示,求解的阻力系数为0.091 86。

图3 MK46鱼雷
图4 MK46鱼雷阻力系数图
从图4可以看出:采用LBM-LES方法与文献[14]实验参考值相比比较接近,与文献[15]采用Fluent仿真计算结果误差在可接受范围内。
3.2 结果分析
本文模拟仿真航行器水下行状态时速度为6、12、18 m/s,迎角由-45°变化到45°共54种工况的流场。航行器在水面正常航行状态时不做俯仰方向的机动,故只模拟航行器在0°迎角、速度由0变化到20 m/s工况下的流场。

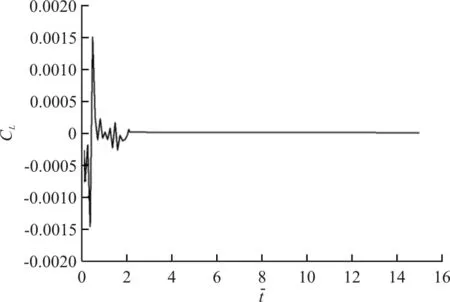
(a) 升力系数
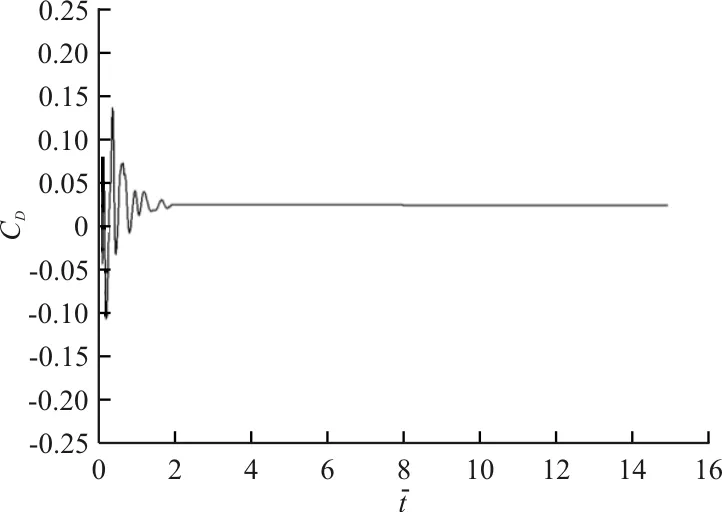
(b) 阻力系数
航行器在水下速度为8 m/s、迎角为0°工况下航行时的表面压力云图如图6所示。
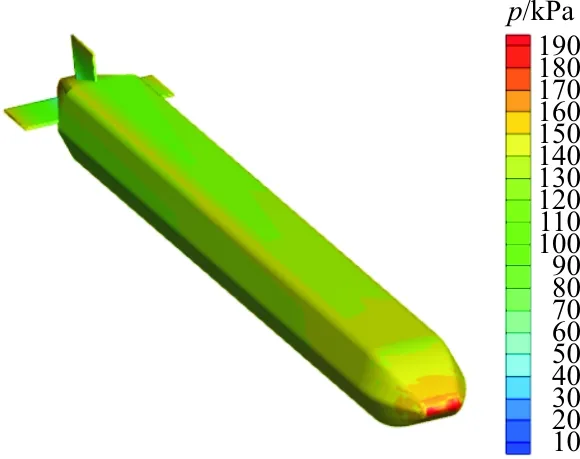
图6 航行器水下状态时压力云图
从图6可以看出:航行器水中航行状态时头部、尾翼的上端处受到较大的压强,在航行器头部向机身、机身向尾部的过度区域形成低压区。其中,水下航行时低压区的产生通常是由于物体在水中航行时产生的空泡造成的。
由于航行器在不同航行状态时外形会发生变化,在进行计算升力、阻力系数时所用的参考面积也有所不同。其中,在水下航行状态时所用参考面积为模型的最大横截面积0.028 89 m2,水面航行状态时所用参考面积为航行器四个水翼的总面积0.16 m2。航行器在水下航行状态时的升力、阻力随迎角的变化曲线如图7所示。
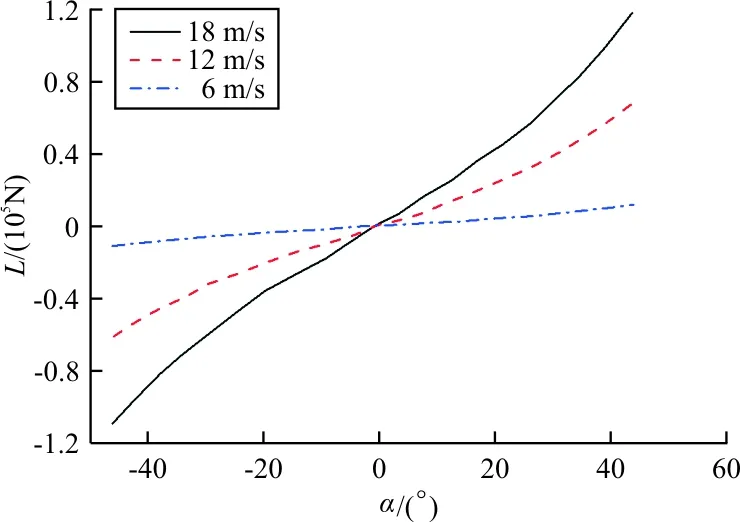
(a) 升 力
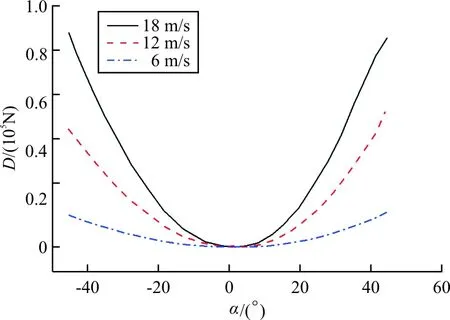
(b) 阻 力
从图7(a)可以看出:升力随迎角的增大而增大,其中水中航行升力曲线和0°线相交于零升力处,这表明航行器的对称外形在0°迎角状态下航行时无升力的产生。
从图7(b)可以看出:阻力基本上以0°线呈对称分布;阻力在0°到45°范围内随着迎角的增大而逐渐增大,这是由于航行器在迎角变大的过程中在速度方向的投影面积增大,使航行器所受压差阻力迅速变大[1];航行器在相同迎角下,随着速度增大,航行器阻力逐渐增大,并且有加快增大的趋势;航行器在小迎角的范围内阻力相对较小,在水下有富裕升力做机动。
航行器在水面航行时阻力包括水阻力和空气阻力,但是海水与空气两种介质物理性质存在较大的差异,故水面航行状态时主要考虑航行器水阻力而忽略空气对航行器的影响作用。水面航行状态时,折叠在机身上的水翼机构打开并且航行器整体处于半潜状态。航行器在水面航行状态时升力、阻力随速度的变化曲线如图8所示。
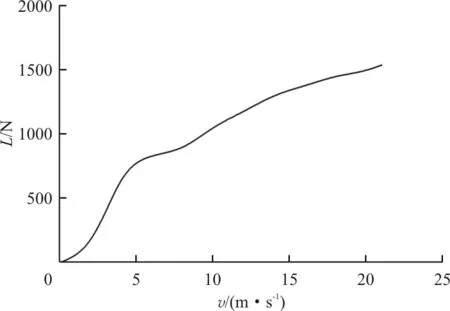
(a) 升 力
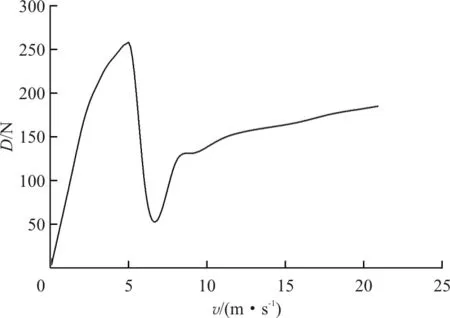
(b) 阻 力
从图8可以看出:随着航行器的运动作用,水翼产生向上的升力,使航行器逐渐离开水面,水翼可以使得航行器阻力性能良好且水上部分保持较好的稳定性。其中,在速度4.3 m/s左右阻力达到最大值,这表明水翼船在此时处于即将离开水面的状态。在此速度之前,航行器机身部分处于水中,所受阻力比较简单,主要所受阻力为摩擦阻力以及小部分附体阻力。在此速度之后,机身离开水面造成阻力急剧变小,航行器在水翼升力作用下机动性增加。因此,相比于机身直接浸入海水中航行,水翼的使用较大程度地减小了阻力。
4 结 论
(1) 在水下航行时,航行器通过收缩水翼在较小的迎角范围内阻力较小,适合高速航行;在水面航行时,展开的水翼增大了航行器的升力,减小了阻力。低速时由于机身浸入水中的原因,水翼效率较低。随速度的增大其升力、阻力性能大大提高。
(2) 通过改变外形,航行器兼顾了鱼雷和水翼船的航行性能,能够满足航行器水下、水面的航行和机动要求,其外形设计及两栖航行性能还有较大的优化空间。
(3) 在未来的工作中,将重点研究航行器跨越水面过程流体动力学特性,为两栖水翼航行器的设计及进一步优化提供参考。