基于DenseNet的单目图像深度估计
2019-03-05,,
,,
(浙江工业大学 信息工程学院,杭州 310023)
0 引言
随着人工智能的迅猛发展,各类人工智能产品(如无人驾驶汽车、医疗机器人、巡检机器人)应运而生,在其工作过程中需要根据外界环境因素自动做出决策,通常的实现方法是利用计算机视觉技术对周围环境3维结构进行感知,实现3维重建,从而进行决策。因此,3D场景解析是人工智能领域目前最火热、最重要的研究课题之一。3D场景解析的重要基础为深度信息的获取,而单目图像获取深度信息是其中的重要方法。
当前获取场景深度信息主要有硬件实现与软件实现两种方法。硬件实现方法是利用传感器技术,例如微软开发的3D体感摄像机Kinect,利用ToF(time of fly)原理,通过给不可见光打码、测距光线强弱随时间变化等手段,根据光线的反射时间计算距离,特点是实时性好,算法开发工作量低。但是,尚未成熟的传感器技术导致输出图像的分辨率过低,仅仅适合室内小范围环境测量。
软件实现方法是通过图像处理获取深度信息。目前最为常见的为双目立体标定方法[1],通过算法匹配左、右两幅图像中相同的特征点得到视差,再根据几何关系算出深度,但其匹配精度较低,受光线影响较大。在此基础上提出了结构光方法,其利用有编码的光源,主动将光源特征打在图像上进行匹配,精度有显著提升,但仍对环境光线等条件有一定要求。而单目图像对设备数量、环境条件要求较低,因此,通过单目图像获取深度信息是最贴近实际情况、应用场景最为灵活的方法。
利用单目图像获取深度信息本身是一个病态问题,一张图像理论上可以对应无限张深度图。因此,传统的单目图像获取深度信息多是基于物体的移动、相机焦距变化[2]等方法,将深度估计作为一个概率模型来处理,精度相对较低。SFM(Structure-from-Motion)是其中经典的方法之一[3],通过相机不同时间间隔的抓拍图像,估计相机的姿态,进一步获取场景中物体深度信息。
随着近些年深度学习的发展,卷积神经网络(Convolutional Neural Networks,CNN)在图像处理、语音识别等领域发挥着越来越重要的作用。CNN在特征提取、结果分类等方面无需人工干预,大大提高了模型的通用性。因此,学者们开始广泛使用CNN来研究单目图像的深度信息估计课题。鉴于CRF((Conditional Random Fields)在语义分割上的优异表现,Liu等人[4]提出了将CRF应用到单目图像深度估计的方法,与通常直接设定CRF的一元、二元势函数方法不同,他们将势函数本身也作为学习对象之一,通过训练系数优化势函数,从而优化训练结果,但其文中提到的超像素仍需手工实现划分。相比之下,Eigen等人[5]提出了一种基于多尺度网络结构的深度学习方法,通过两个尺度对图像分别进行全局与局部的特征采样,获得最终输出,此方法无需提供任何人工分类特征,直接在原始图片上进行训练并获得像素级别的深度信息结果。在Eigen等人的基础上,Laina等人[6]提出了一种应用ResNet[7]的网络模型,该模型利用ResNet特征前向传递高效的特性,并结合更深、更复杂的网络结构,有效提高了结果精度。Godard等人[8]提出了一种利用左右图一致性的无监督学习方法,该方法原理类似双目立体标定,利用左图样本得到深度图,再根据深度图与右图生成左图预测结果,与左图样本进行比较,实现了自编码、自解码,但上述方法在结果精度提升空间。
针对上述问题,在此提出了一种基于深度学习的单目图像深度估计方法,根据输入的RGB图像,直接得到图中各个像素对应的深度信息。本文的主要创新点是:首先,提出了一种新的CNN结构,对图像进行3个尺度的特征提取与融合,兼顾全局特征与局部特征,优化输出结果;其次,网络结构中融合了DenseNet[9],加强了特征前向传播,缓解了深层网络梯度消失问题,并且加强了特征重用,实现多级综合高效利用,同时还减少了参数数量。最后,通过实验证明,多尺度的网络结构与DenseNet的加入有效提升了输出深度图的精度。
1 网络模型
1.1 模型概述
为了进一步研究单目图像深度估计方法,本文提出了一种基于DenseNet的多尺度CNN网络模型。首先,将网络结构分为三个尺度,各个尺度对数据集进行不同程度的缩放,其中第一个尺度(Scale1)输入图像尺寸最大,第三个尺度(Scale3)最小。第一个尺度对图像特征进行全局粗糙采样,其输出结果与第二个尺度(Scale2)的输入图像尺寸相同。Scale2的输入图像在原数据集基础上结合了Scale1的输出,Scale2更注重图像中局部信息的采集,在上一尺度全局、粗糙的结果上进行优化,获得更具局部特征的结果。类似的,Scale3的输入是由原数据集与Scale2的输出相结合,在进一步优化输出深度图的同时,提高了深度图的分辨率,获得高分辨率的输出结果。具体网络结构如图1所示。

图1 网络模型结构
1.2 多尺度网络结构
1.2.1 全局特征粗糙采样
Scale1的主要目的是对图像进行全局的采样,在全局的层面提取图像特征,网络由DenseNet模块、上采样模块与卷积层组成。Scale1的输入图像尺寸为240×320,首先通过两个卷积层丰富信息特征采集,随后利用卷积核3×3,步长为2的卷积层(简称3×3卷积层)代替传统的池化层对图片进行降采样,得到的结果作为DenseNet模块输入。图像通过DenseNet模块后,由上采样模块对输出结果进行上采样,最终图像输出尺寸为64×80,与Scale2输入尺寸相同。由于Scale1的输入图像尺寸最大,因此Scale1的视野更广,采集到的特征最为丰富、最为原始,在全局层面对图像完成了一个粗糙的采样。
1.2.2 局部特征细致采样
Scale2通过连接层(concatenate layer)将缩放的数据集与Scale1的结果输出组合,扩展了输入样本数量,输入图像尺寸为64×80。与Scale1相比,Scale2考虑到图像中像素与周边像素深度信息的相关性,更注重局部信息,利用局部特征优化输出深度图。Scale2网络结构由卷积层、上采样模块组成,卷积层负责丰富特征信息采样,上采样模块负责获得合适分辨率的输出。对于卷积层部分,采用了多个3×3卷积核替换传统5×5、7×7卷积核的做法,在获得相同感受野的情况下,多个3×3卷积核相比大尺寸卷积核存在更多的非线性因子,使得判决函数更有判决性。同时,3×3卷积核的实现方式可以显著减少参数量,提升训练速度。最终,Scale2输出尺寸为128×160的深度图像,与Scale3输入尺寸相同。
1.2.3 提高分辨率,获得预测结果
Scale3通过concatenate layer将缩放的数据集与Scale2的结果输出组合,网络结构与Scale2类似。Scale3负责进一步优化图像输出并提高分辨率,得到空间上连贯、详细的输出结果。
1.3 DenseNet模块
随着深度学习的发展,各类CNN网络模型被提出,从开始的AlexNet、VGGNet,到后来的ResNet等等。DenseNet于2017年由刘壮等人提出,网络结构具有以下特点:第一,DenseNet有效地缓解了网络过深带来的梯度弥散问题,DenseNet每层都能获取前面各层的损失函数,有效加强了特征前向传播,因此可以训练更深的网络。第二,相比ResNet采用求和的方式传播特征,DenseNet采用拼接的方式,将前面所有层输出拼接在一起作为当前输入,显著提高特征传播效率,其非线性变换方程如式1所示。第三,DenseNet有效减少了网络参数,从特征重用的角度提升网络性能。例如,基于ResNet的网络模型通过随机丢弃层防止过拟合,表明并非所有层都是必须的,网络中存在大量冗余,造成运算量的浪费。通常,对于同样的预测精度,DenseNet只需要ResNet一半的参数量。
xl=Hl([x0,x1....,xl-1])
(1)
DenseNet由Dense Block、Transition Layer、池化层、卷积层以及全连接层组合,Dense Block为稠密连接的highway模块,是各层Bottleneck Layer输出的集合。Bottleneck Layer包括卷积层、激活函数、归一化函数以及Dropout组成。Transition Layer负责连接相邻Dense Block,对Dense Block的输出进一步执行归一化、Dropout等处理。
本文中的DenseNet模块由4个Dense Block和3个Transition Layer组成,并在DenseNet原有结构上对其进行了一定改善,是Scale1网络的主要结构。首先,对于图像初始化部分,用多个3×3卷积层替换7×7卷积层、池化层,用小卷积核替换大卷积核,减少参数与计算量;其次,针对各个Dense Block的输出通道数,通过实验对比,最终将各层输出通道数从上至下确定为6、12、48、32;然后,对于Transition Layer,采用了3×3卷积层替换池化层;最后,删除了DenseNet网络结构末尾的全局池化层和用于分类的全连接层,替换为性能更好的1×1的卷积层。
1.4 上采样模块
上采样的主要目的是放大原图像,获得分辨率更高的输出结果。放大图像基本都是采用内插值的方法,在原有图像像素的基础上在像素点之间采用插值算法插入新的像素。
在深度学习模型中,传统的上采样实现方式大多是先将图像分辨率扩展为2倍,用0填充没有数据的像素,然后用5×5卷积层处理扩展后的图像实现插值,由于有很多0值,因此存在很多无用计算。本文中的上采样模块将5×5卷积核拆分为4个大小为3×3、2×3、3×2、2×2的卷积核[6],直接在原图上进行操作,跳过0值的处理,然后将4个输出结果进行交错连接,获得输出结果。同时,在此基础上,添加了激活函数(Relu)、归一化函数以及卷积层,组合成上采样模块,有效提高了上采样的效率。
1.5 损失函数
损失函数的选择是深度学习网络模型训练过程重要环节之一,选择正确的损失函数能提供更好的收敛方向,获得更好的训练结果。目前通用的损失函数为L2损失函数,以最小化预测结果与真实值差的欧式范数平方作为收敛方向,函数定义如式(2)所示:
(2)
容易看出,当预测值与真实值差异较大时,L2损失函数能够迅速下降梯度,收敛速度很快,但是当预测值接近真实值时,L2损失函数收敛速度大大减小,梯度下降缓慢。因此,本文采用了BerHu损失函数[6],巧妙地将L1损失函数与L2损失函数结合,获得了更好的收敛性能。其定义如式(3)所示:
(3)


(4)

表1 损失函数比较
2 结果与分析
2.1 实验设置
为了验证此模型的优化效果,本文选择在NYU Depth V2官方数据集上对模型进行训练、测试。NYU Depth V2是微软Kinect相机采集的室内场景的视频帧序列,由1449对深度信息与RGB像素对应的图片组成。该数据集含有3个城市的464个场景,共分为26种场景类型,1000多种对象。本文训练集与测试集的划分比例为官方的249:215,将原始的480×640RGB图与深度图降采样至240×320作为模型输入,并通过预处理忽略图片中深度信息缺省的像素。根据官方划分,经49个场景作为验证集, 200个场景作为训练集,训练完成后在官方654张标准验证图像上对模型进行测试。本文对训练图像进行随机缩放、目标平面内旋转、水平翻转以及改变颜色和对比度等处理来扩充数据集,避免模型过拟合,提升泛化能力。
实验设备是一台显卡为Tesla K40C的服务器,使用TensorFlow框架。网络训练使用随机训练梯度下降优化模型参数,具体的超参数如下:批处理大小(batch size)为8,最大迭代轮数(max epoch)为1000,学习率(learning rate)为0.001,学习率每经过10轮迭代衰90%,直至网络收敛。整个模型训练耗时约为72个小时,CNN前向过程占时约为每张图0.06 s,整个模型每张图预测时间约为0.23 s,训练时的loss曲线如图2所示。
在此将模型的实验结果与同样在NYU Depth V2数据集上进行训练的相关工作进行对比,采用了常用的衡量指标评估结果[10]:
1)平均相对误差(average relative error,Rel):
(5)
2)均方根误差(root mean squared error,RMS):
(6)
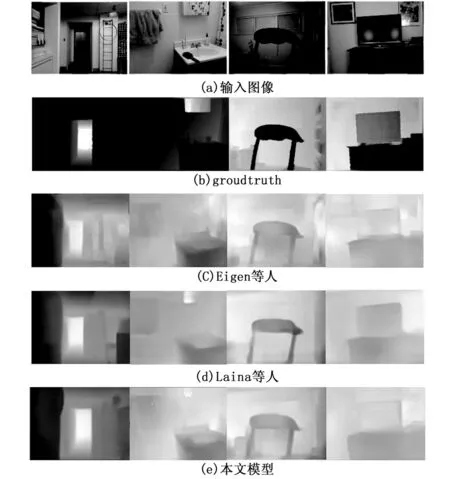
图2 各模型深度预测结果图
3)对数空间平均误差(average log10error,log10):
(7)
4)准确率:

整个训练模型的学习过程为:
步骤1:输入RGB图像L=(x1,xj,...xn)与真实深度图,并对数据集进行数据扩充。
步骤2:RGB图像经过网络模型后得到输出y,与真实深度值y*比较,计算di=|y-y*|。
步骤3:根据di大小,计算损失函数,并更新参数。
步骤4:达到收敛条件或迭代次数上限时终止模型运行,否则重复步骤2)、3)。
2.2 实验结果
通过实验将得到的输出结果与make3D、Eigen以及Laina的训练方法输出结果进行对比,其结果如表2所示。首先,可以看出利用CNN卷积网络模型的输出结果明显优于传统利用先验的几何假设等方法,这主要得益于CNN结构在图像处理方面的强大能力,CNN结构能够从图像中提取出足够多的特征信息,且特征提取和统计分类都不需要人工干预。在利用CNN结构的网络模型中,输出结果略优于Eigen与Laina的模型输出结果,这主要得益于DenseNet的网络特性与多尺度的网络结构,深度预测图结果对比如图2所示。
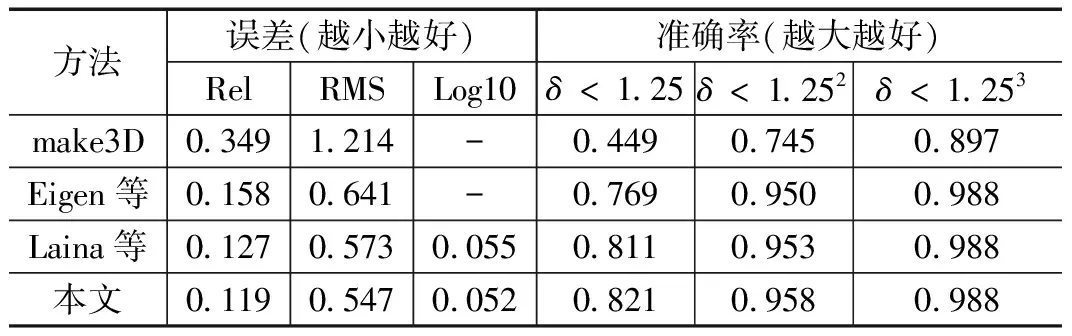
表2 NYU Depth V2数据集上实验结果对比
3 结论
针对单目图像深度预测问题,提出了基于深度学习的多尺度网络结构模型,利用DenseNet的强化特征前向传播、特征重用以及减少参数等特性,以及多尺度网络结构提供的全局预测、局部预测结果结合特性,有效提高了单目图像深度预测精度,其结果显著优于传统的处理方法,且在与其他CNN网络模型对比中也取得更好的输出结果。
但目前此模型仍是在有监督的条件下训练,需要提供真实深度信息,因此对数据集提出了很高的要求,笔者正在尝试构建无监督的训练模型,加大模型适用范围。同时,此模型是直接由RGB图训练得到深度结果,下一步考虑在模型中融入传统的深度获取方法,例如利用双目标定原理等,进一步提升预测精度。