佳拉洁雅装置时序控制系统的设计与实现
2019-03-05,,,
, , ,
(哈尔滨工业大学 电气工程及自动化学院,哈尔滨 150001)
0 引言
在能源危机愈演愈烈的今天,核能作为一种高效清洁的能源一直受到广泛研究,佳拉洁雅装置是一种核聚变约束装置,它通过载流线圈产生的磁场对聚变产生的等离子体进行约束从而实现可控核聚变。装置主要由产生等离子体的等离子体枪,对等离子进行输运的等离子体通道以及由线圈构成的磁阱组成。时序控制系统是装置总控系统的重要一环,它担负着保障整个装置平稳运行的任务。由于整个装置运行时间极短大约持续几十毫秒,所以对运行精度要求较高,因此需要构建精确的时序控制系统精确控制等离子枪,等离子通道和磁阱这三部分的工作顺序和工作时间,同时为了对装置中的相关参数进行精确采集,时序控制系统还需要对装置中探针的工作时序进行控制,因此构建一个精确可行的时序控制系统十分有必要[1-2]。
佳拉洁雅装置系统使用脉冲电源为等离子体枪、等离子通道、溜槽线圈、磁阱和探针供电。
因此时序控制系统通过延时脉冲信号对装置各部分和采集探针的脉冲电源进行控制,在既保障装置能够进行等离子体产生、输运、筛选以及约束等一系列功能的基础上,完成等离子体参数采集这一任务。本文结合佳拉洁雅装置相关参数,建立了各部分的时序控制模型,提出了使用延时脉冲控制各部分启停的具体过程,通过PCI-1780U开关量板卡和LabVIEW作为系统的软硬件核心,进行了时序控制系统的设计与实现。
1 时序控制系统数学模型的建立
佳拉洁雅装置的时序控制如图1所示。整个时序控制的流程为:脉冲1控制等离子枪开始工作,发射等离子体,在等离子体进入等离子通道之前,脉冲2控制全等离子体电源开始工作,完成等离子的输运工作,在输运的等离子体未到达溜槽线圈时,脉冲4控制溜槽线圈电源开始工作,实现等离子体的注入,脉冲5则控制磁阱电源实现等离子体的约束,脉冲3、6分别控制等离子体通道和磁阱中的探针工作以实现等离子体参数的采集。本文从这一过程出发,分析了佳拉洁雅装置中等离子体枪、全等离子体通道、溜槽线圈、磁阱和测量探针的时序控制系统数学模型。探针则针对通道探针和磁阱探针分别研究。
1.1 佳拉洁雅装置时序控制系统数学模型的建立
1.1.1 等离子体枪
佳拉洁雅装置通电运行时,等离子体枪率先工作[3],将其工作的起始时刻记为tpg0,则在时序控制系统中等离子体枪工作时间T1应该改满足式(1):
(1)
式中,tpgs为等离子体枪从通电到正常工作所需要的时间,tpi为等离子体开始电离和激发所需时间,tpj为等离子体从枪中射出所需要时间,tpgsp为等离子体枪的脉冲电源接受脉冲到开始供电所需要时间,tpgsu为等离子体枪电源的输出满足装置要求所需时间。
对佳拉洁雅装置进行分析可知,等离子体枪启动时间、等离子体电离和激发时间以及喷射时间之和应该小于等离子枪的工作时间。启动时间包含脉冲反应时间和输出脉冲电压上升时间这两部分[4],电离时间为氢气经过电离和激发变为等离子体所需要的时间[5],喷射时间计算则以等离子体到达出口时的时刻为准。
1.1.2 全等离子体通道
等离子枪发射出等离子体后,全等离子体通道开始工作以实现对等离子体的输运,记其工作的起始时刻为tpc0,则其工作时间T2应满足式(2):
(2)
式中,tpcs为全等离子体通道从通电到正常工作所需要的时间,tpct为全等离子体通道的等离子体输运时间,tpch为全等离子体通道的保持时间,tpcsp为全等离子体通道脉冲电源的接受脉冲到开始供电所需要时间,tpcsu为等离子体通道电源输出满足运行要求所需时间。
通道启动时间、等离子体输运时间及保持时间之和应当小于等离子体工作时间。启动时间包含脉冲反应时间和输出脉冲电压上升时间这两部分;输运时间即等离子体在通道中通过所持续的时间。由于等离子通道的脉冲电源输出电压幅值远远小于等离子体枪电压幅值所以通道中脉冲电压的上升时间也远远小于等立体枪中脉冲电压上升时间。
1.1.3 溜槽线圈
对佳拉洁雅装置原理分析可知,溜槽线圈的磁场方向与磁阱中盲鳗线圈的磁场方向是相反的,为了避免其磁场影响磁阱中的磁约束,故溜槽线圈应该短暂启动,启动时刻应该在等离子体进入磁阱之前,记为tpl0,其工作时间T3满足式(3):
(3)
式中,tpls为溜槽线圈从通电到正常工作所需要的时间,tpli为等离子体注入时间,tplsp为溜槽线圈脉冲电源的启动时间,tplsu为脉冲电源输出满足溜槽线圈要求的时间。
溜槽线圈启动时间、等离子体注入时间及全等离子体通道保持时间之和应小于溜槽线圈工作时间。启动时间包含脉冲反应时间和输出脉冲电压上升时间这两部分;等离子体注入时间为等离子体从溜槽线圈注入磁阱的时间。在这一过程中存在着短暂的束流保持现象,这一点与全等离子体通道中是相同的。
1.1.4 磁阱
磁阱在等离子体进入前启动以实现对等离子体的约束,记磁阱的工作时刻为tmt0,其工作时间T4满足式(4):
(4)
式中,tmls为磁阱从通电到正常工作所需要的时间,tmlc为磁阱对等离子体的约束时间,tmlsp为磁阱脉冲电源的启动时间,tmlsu为脉冲电源输出满足磁阱要求的时间,Δt为延时。
磁阱启动时间、等离子体约束时间、全等离子体通道保持时间和延时之和应该小于磁阱工作时间,磁阱启动时间包含脉冲反应时间和输出脉冲电压上升时间这两部分;约束时间为等离子体从受到约束到全部摆脱束缚所精力的时间。这是一个复杂的过程,为了方便今后对逃逸后装置中空间参数的研究,故增加延时以方便实际分析。
1.2 测量探针时序控制系统数学模型的建立
由于我们希望获得全等离子体通道和磁阱中的等离子体参数,所以在这两部分中分别放置探针进行测量,对这两部分的时序控制系统的数学模型分析如下。
1.2.1 全等离子体通道探针时序控制数学模型
磁探针置于全等离子体通道中,它的工作时间介于等离子体注入等离子体通道到离开通道这一过程之间,记磁探针的起始工作时刻为tpcp0,它的工作时间T5满足式(5):
(5)
式中,tcsu为从通电到正常工作所需要的时间,Δtc为通道探针的延迟时间。
为了保证采集参数的完整性,全等离子体的工作时间应包含在探针工作时间之内,同时通道工作时间、磁探针的启动时间和磁探针延迟时间之和应小与全等离子体通道中磁探针的工作时间。
1.2.2 磁阱探针时序控制数学模型
探针安放于磁阱中用来测量等离子体密度和电子温度等参数,其工作时间介于等离子体注入磁阱的时刻和逃逸时刻之间,记Langmuir探针的工作起始时刻为tmtp0,工作时间T6满足式(6):
(6)
式中,tpsu为Langmuir探针通电到正常工作所需要的时间,Δtmt为Langmuir探针的延迟时间。
磁阱工作时间、探针启动时间和探针延迟时间之和应小于Langmuir探针的工作时间。Langmuir探针在等离子体注入磁阱并完成逃逸之后停止工作。
由1.1和1.2节分析,结合佳拉洁雅装置工作过程和系统需求,建立装置中各部分的时序控制系统模型。输出脉冲的示意图如图2所示。

图2 时序控制输出脉冲示意图
2 延时脉冲产生过程分析
建立佳拉洁雅装置时序控制系统数学模型之后,考虑到系统需求和构建系统的复杂程度。
选取合适的软硬件构建时序控制系统以实现对佳拉洁雅装置的时序控制。本文选择PCI-1780U板卡输出脉冲信号,上位机通过LabVIEW实现参数设置和时序控制并构建用户友好的人机界面。
LabVIEW是由美国NI公司开发的一种程序开发环境,也是虚拟仪器技术中运用最多也最方便的一种编程语言[6],它使用图形化的编程语言,可以让使用者无需了解程序的底层实现即可根据需要定制自己的程序,非常适合时序控制领域,使用LabVIEW进行程序设计更加简单也更加直观高效,而LabVIEW提供了海量的函数库和接口,足以实现复杂多样的系统,满足各种各样的设计需求。时序控制系统结构如图3。
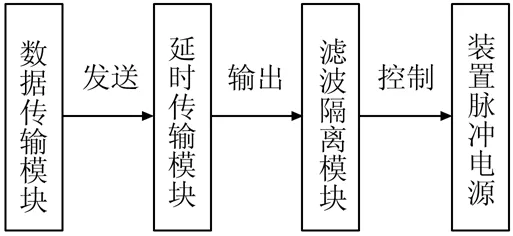
图3 时序控制系统结构示意图
时序控制系统由数据发送模块、延时触发模块和隔离滤波模块三部分组成。数据发送模块将设好的装置中各部分电源的控制脉冲参数传输至开关量板卡PCI-1780U,板卡通过PCI接口与PC机相连;延时触发模块根据控制参数输出相应的脉冲,隔离滤波模块通过光电耦合电路防止输出的各路信号相互干扰,通过滤波电路滤除输出脉冲中的噪声。从而实现对装置各部分的精确控制。
结合佳拉洁雅装置特点以及选取的硬件的具体结构参数。为了更加灵活的对装置进行时序控制,进行脉冲宽度和延时都可变的参数控制,使用两个计数器分别对这两个参数进行控制,由PCI-1780U资源配置,输出4路时序延时脉冲。

图4 延时脉冲的产生过程示意图
3 时序控制系统软硬件设计
结合时序脉冲产生过程的分析,进行时序控制系统的软硬件实现,硬件部分由PCI-1780U定时器板卡和ADAM3968接线端子构成,软件部分则由LabVIEW进行上位机软件编写,实现时序控制和友好的人际界面。
3.1 PCI-1780U板卡的功能及参数
PCI-1780U是一个PCI接口的多通道计数器板卡,它的芯片型号是AM9513[7],它由8个16位计数器、8个时钟源和八个I/O口构成,而它的技术器和时钟源都是相互独立的,所以可以实现多路时序控制,通过CPLD来实现定时器或计数器的功能,可以通过编程灵活实现触发式输出和延迟输出等功能。
3.2 时序控制系统软件设计
使用LabVIEW进行上位机界面和时序控制系统的编写[8],图5为时序控制系统流程图,上位机界面如图6所示。在人机界面可以对各个通道的脉冲脉冲上升时间和延时进行设置,运行程序进行脉冲输出前,先根据需求和理论分析合理的设置各通道的相关参数即可输出满足需求的脉冲。DAQNavi为LabVIEW提供了驱动程序,使得上位机程序可以对板卡进行控制从而实现软件输出到硬件输出的转化。同时设有错误状态监测显示,方便出现不正常输出时进行问题分析和错误排查。该前面板的程序通过事件结构实现,添加了空闲时间事件可以更加合理有效的分配资源防止CPU被长期占用而导致的资源浪费,也使整个程序更加高效。
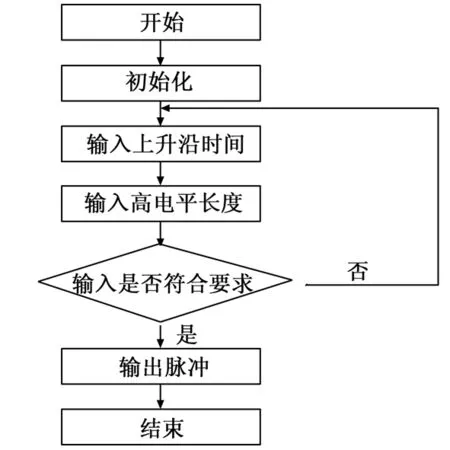
图5 时序控制系统软件流程图
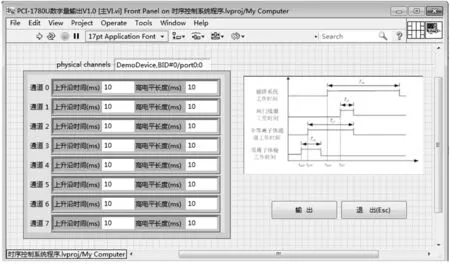
图6 LabVIEW人机交互界面
4 时序控制系统的实验与分析
上节进行了佳拉洁雅装置时序控制系统的设计与实现,本节利用接线端子和示波器将输出信号进行量化,构建系统测试平台来验证脉冲电源控制信号的精确性与准确性。
在上位机设定各通道脉冲上升沿时间和电平持续时间之后,该参数通过PCI接口传入PCI-1780U板卡[9],板卡的输出通过ADAM3968接线端子导出至示波器,本文我们选取接线端子的DO0~DO7通道,从而通过量化验证脉冲电源输入脉冲的精确性。
分别导出示波器中装置各部分的时序控制信号,经过计算得到:
1)等离子体枪脉冲信号:当在上位机设置输出脉冲宽度为600 μs,示波器实际测量得到的脉冲宽度为619 μs,误差为3.3%。
2)全等离子体通道脉冲信号:当在上位机设置输出脉冲宽度为2 ms,示波器实际测量得到的脉冲宽度为2.036 ms,误差为1.76%。
3)溜槽线圈脉冲信号:当在上位机设置输出脉冲宽度为1 ms,在示波器上实际测量得到的输出脉冲宽度为1.037 ms,误差为3.7%。
4)磁阱:设置输出脉冲宽度为15 ms,示波器测得的输出脉冲宽度为15.6 ms,误差为4%。
5)磁阱探针:理论控制脉冲宽度为17 ms,实际测得的输出脉冲宽度为17.5 ms,误差为2.9%。
6)全等离子体通道探针:理论输出脉冲宽度为4 ms,实际测得的输出脉冲宽度为3.98 ms,误差为0.5%。
由以上分析可知,佳拉洁雅装置中等离子体枪、全等离子体通道、溜槽线圈、磁阱、通道和磁阱中的电源实际输入脉冲与设定值的误差满足设计需求。而实际使用脉冲信号对脉冲电源进行控制时还要考虑到装置中各部件的反应时间和启动准备时间等参数,因此应该预先进行多次实验确定相关参数后对起始时刻和脉冲宽度进行校准[10]来确保装置平稳运行。
为了进一步研究装置中各部分输入脉冲间的对应关系,设置等离子枪脉冲宽度为1.5 ms、脉冲起始时刻为1 ms,全等离子体通道脉冲宽度为为3 ms、脉冲起始时刻为1.4 ms,溜槽脉冲宽度为1.5 ms、脉冲起始时刻为3.4 ms,磁阱脉冲宽度为8 ms、脉冲起始时刻为3 ms,装置中各部分的脉冲电源和输入脉冲的对应关系如图7、8、9所示。
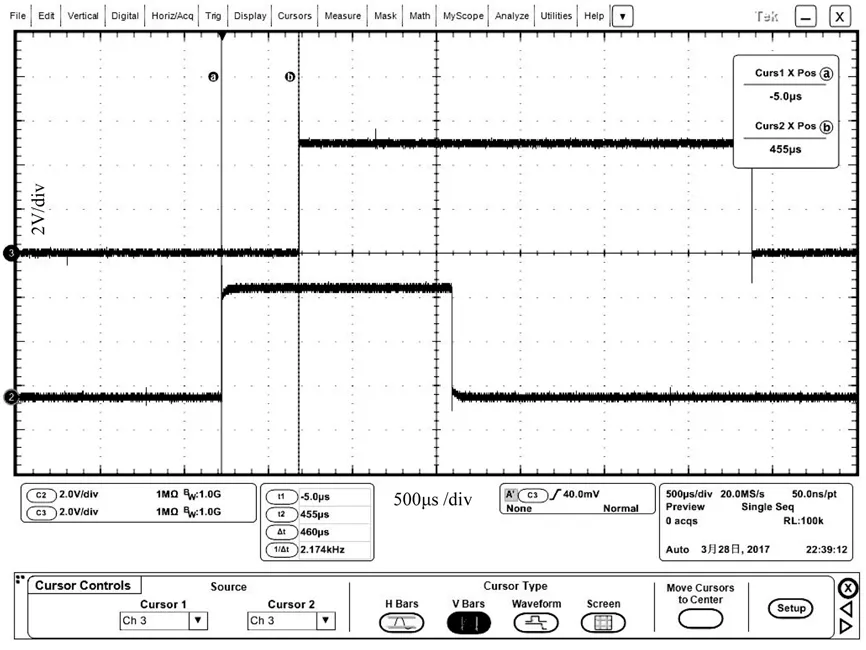
图7 等离子体枪和通道电源输入脉冲的对应关系

图8 溜槽线圈和通道电源输入脉冲的对应关系
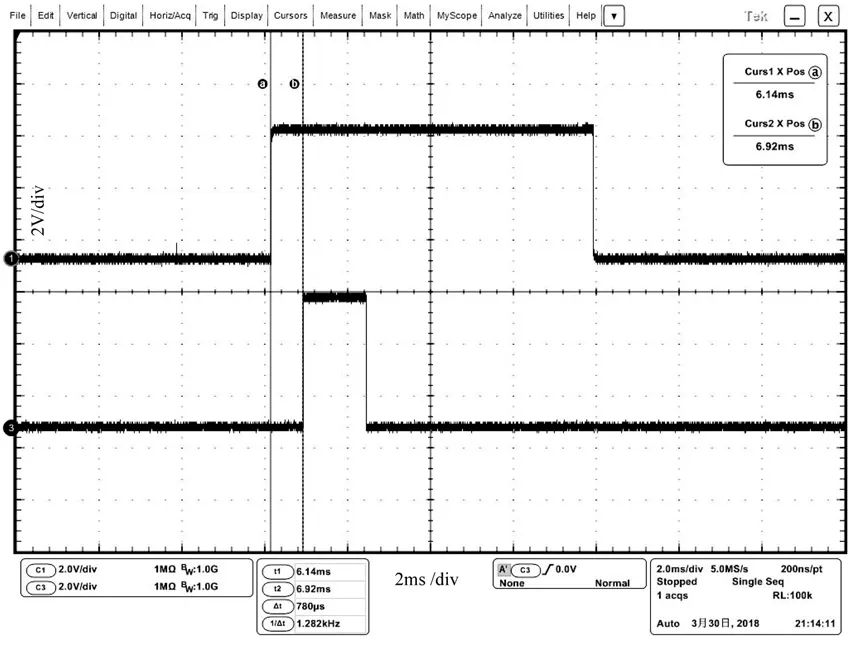
图9 溜槽线圈和磁阱电源输入脉冲的对应关系
对测试结果进行分析计算可知:等离子体枪和全等离子体通道间延时为455 μs,溜槽线圈和全等离子体通道间延时为1.91 ms,溜槽线圈和磁阱间延时为780 μs。将此延时与期望脉冲输出时刻进行对比可得到时序控制误差,结果如表1所示。由表1可知,等离子体通道和溜槽线圈中脉冲的实际输出时刻与期望输出时刻几乎没有误差,而磁阱中脉冲输出时刻间的误差较大,可以通过增大磁阱工作脉宽的方式进行改善,使其满足装置需求完成等离子体约束工作。

表1 脉冲输出误差分析
5 总结
本文使用LabVIEW作为软件开发环境,PCI-1780U板卡及其接线端子作为硬件核心,设计实现了佳拉洁雅装置的时序控制系统。通过建立装置中各部分和探针的时序控制系统的数学模型,分析了整个时序控制系统延时脉冲的产生过程,构建了时序控制系统的测试平台,通过量化的方式对时序控制脉冲进行误差分析并且分析了输入脉冲间的对应关系,系统精度满足系统运行需要和时序控制系统设计需求,实现了对佳拉洁雅装置的精确时序控制。
