基于卡尔曼滤波和K-means++算法的内河航标漂移特性研究*
2019-03-01周雨萌初秀民蒋仲廉
周雨萌 初秀民 蒋仲廉* 钟 诚
(武汉理工大学国家水运安全工程技术研究中心1) 武汉 430063) (武汉理工大学能源与动力工程学院2) 武汉 430063)
0 引 言
内河航标由于航标本身的结构及外界动力作用,会发生位置偏移[1].当位移超过一定的阈值,即视为航标发生了飘失,将会对过往船舶通航带来极大的安全隐患.吕应龙等[2]提出了助航标志立法的重要性,呼吁国家出台配套的、专业的、统一的航标管理规定,从立法层面改善航标漂移对航行安全的影响.冯心恺等[3]从航标的硬件出发,分别提出了对航标自身沉石结构和锚链系挂方式的改进,一定程度上降低了航标的漂移量.为了研究航标的漂移规律、达到对航标的实时监控,吕永祥[4]初步构建了一套航标遥测遥控系统,林秀明等[5]则对系统进行了升级,并达到了更高的精度和准确度.在大数据背景下,李术元等[6]提出了基于云模型的航标评估体系,为航标可视化评估提供了研究思路.
目前,航标位置数据全部来源于基站接收的航标GPS数据;因此,对航标漂移的研究也只能从航标GPS数据着手.减少GPS数据包含的误差,是研究航标漂移不可缺少的步骤.近年来,很多学者提出采用差分定位的方法来降低GPS定位误差;然而,差分定位方法需对GPS接收机进行改装,具有一定的操作难度.卡尔曼滤波具有无需储存观测数据、实时处理快速的优点,在GPS数据处理领域得到了广泛而深远的应用.赵琳等[7]利用极大似然准则推导出了精度和稳定性更佳的自适应卡尔曼滤波方法;王虎等[8]通过优化协方差矩阵降低了异常数据对滤波的影响.K-means++聚类算法是K-means聚类算法的一种改进算法,它优化了K-means算法初始随机点的选择,降低了偶然因素对聚类结果的影响,更适用于修正航标漂移聚类中心.
文中围绕长江中游武汉段航标的漂移与水位变化情况,首先根据研究区域的航标分布特点对航标数据进行分块处理;然后分别使用卡尔曼滤波和K-means++算法对数据进行预处理,减小误差对航标漂移计算的影响;基于航标的日均位移及日均水位相关性分析,建立了航标漂移与水位的二次拟合模型,经过实际数据验证,拟合曲线真实可靠.
1 研究区域
内河航标往往依桥而布,用以指示船舶在桥区的复杂水文条件下安全通航.长江武汉段因为桥梁众多,通航环境相对复杂,此现象尤为明显.长江武汉段历年最高水位29.73 m,最低水位10.08 m,平均水位为19.01 m.根据历年航道水位的变化情况,航道部门将长江武汉段的水位期分为枯水期、中水期和洪水期.本文主要关注水位变化较大的中水期、洪水期,即每年的5—8月.
目前,长江武汉段投入使用的航标有39座,其中,分布在桥梁附近的31座(包括军山大桥).根据跨江大桥的分布,将研究区域划分为图1所示的五个子区域,每个子区域内包含5~7个航标不等,研究区域航标约占长江武汉河段布设总数的80%.
2 航标GPS数据预处理
2.1 基于卡尔曼滤波的航标GPS定位校正
GPS的定位精度受诸多因素影响,如:卫星星历误差、卫星钟差、大气折射误差和接收机天线相位中心偏差等.长江航道武汉段航标的GPS定位误差为5~15 m.卡尔曼滤波可以通过测量结果对估计结果进行不断地修正,从而得到最优的估计,具有可操作性强、效率高等特点,因而常常应用于GPS定位误差分析与修正研究.
假设航标的动态位置由向量Xk=[xkyk]T表示,xk和yk分别为第k次记录下的实验航标的经度和纬度信息,建立航标运动简易模型为
(1)
式中:取样时间间隔为Δt=tk+1-tk;在较短的时间内,rk可认为是固定不变的.假设tk时刻的航标动态位置Xk受系统噪声序列Wk-1驱动,则航标漂移系统状态方程和观测方程分别为
Xk=Φk,k-1Xk-1+Γk-1Wk-1
(2)
Zk=HkXk+Vk
(3)
式中:Xk为状态向量,对Xk的观测满足线性关系;Φk,k-1为tk-1时刻至tk时刻的一步转移阵;Γk-1为系统噪声驱动阵;Hk为测量阵;Vk和Wk分别为观测和系统噪声.
假设实验观测周期为T,可得到航标速度模型参数为
参照文献[9]取连续观测实验数据方差为观测噪声Vk,则Vk=Std(d)2.
通过上述分析,采用卡尔曼滤波算法处理GPS接收机原始数据,将滤波后的精度控制在可接受的范围内.
(4)
为验证算法可靠性,取“武汉长江大桥桥区下水2白浮”(具体位置见图1标注)2017年5月AIS基站收到的有效位置数据共1 208条进行测试.滤波前后数据分布见图2,原始数据呈现离散特征,有较多位移异常值存在;滤波处理后,航标位置数据相对集中,反映了实际通航条件下的航标漂移情况.

图2 卡尔曼滤波前后航标位置数据分布图(以武汉长江大桥桥区下水#2白浮为例)
2.2 基于K-means++的航标安装误差矫正方法
在进行内河航标安装作业时,为提高航标布设的精度,航标船需要获取前甲板作业点准确的位置信息[10].目前,广泛采用的定位方式是工作人员经验结合GPS定位,受外部动力因素作用,该方法很难将航标锚点布设在预定的位置上,必然产生安装误差.加上多次的碰撞和航标复位,已知的航标基点往往并不是其实际的聚类中心.为得到内河航标相对准确的聚类中心和漂移距离,需根据滤波后的航标位置数据计算其漂移的聚类中心.
因内河航标的布设基点是已知的,为降低算法计算量,将已知基点应用于航标聚类中心的计算.使用K-means++算法对滤波后的GPS数据采用进行聚类分析,将航标布设基点选取为初始聚类中心,算法流程见图3.
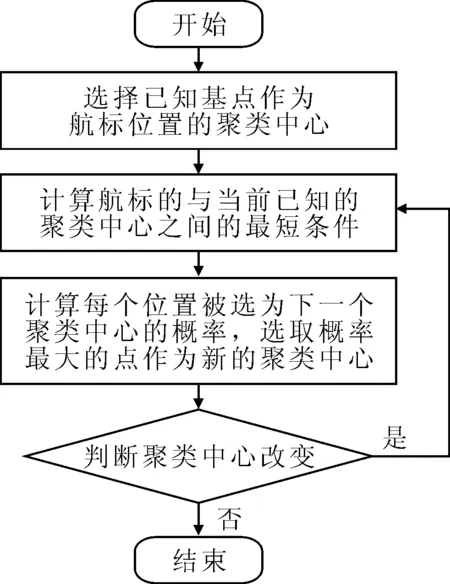
图3 K-means++算法流程图


图4 滤波前后K-means++聚类中心对比(以武汉长江大桥桥区下水#2白浮为例)
2.3 航标GPS数据预处理结果
采用卡尔曼滤波预处理前后的航标经纬度数据、K-means++聚类算法计算获取的聚类中心,计算航标漂移距离并绘制分布直方图,见图5.

图5 航标漂移距离预处理前后直方图
由图5可知,经卡尔曼滤波与K-means++聚类分析后获取的航标漂移量,总体小于原始数据计算结果,且数据相对集中,无异常数据,较好地反映了实际环境条件下航标漂移的基本特征,避免了无效误报警的出现.
文献[10]采用卡尔曼滤波与ISODATA结合的算法,开展了关于航标误报警的研究,通过校正航标位置误差改善了航标误报警的情况,减轻了航标维护的压力.相较之下,本文所采用的卡尔曼滤波和K-means++算法更简洁可靠,所得结论与其基本一致.
3 内河航标漂移与水位关系研究
3.1 航标漂移与水位变化相关性分析
因研究子区域距离相对较近,其水文、气候条件相似,在五个桥区水域各选取一个航标开展分析研究.因长江武汉河段远离河口区域,航标仅受下泄径流作用;水位涨落只影响漂移距离不影响方向,利用式(5)将航标2017年5—8月的经纬度数据转换成位移数据.
D=R×arccos (siny1siny2+
cosy1cosy2cos (x1-x2))
(5)
式中:R为地球半径,均值为6 370 km;x1,y1为航标聚类中心的经纬度(rad);x2,y2为航标的瞬时坐标经纬度(rad);经纬度东经为正、西经为负,北纬为正、南纬为负.
图6为水位与航标漂移绝对位移日均变化图,由图6可知,研究区域水位在7月左右达到局部最高值,对应的五个航标漂移距离同样出现局部峰值;其中,二七长江大桥处的航标(航标2)波动最为剧烈.因其所处汉口水道河道顺直、水深及航道条件良好,水位变化对其影响最大.

图6 水位与航标漂移绝对位移日均变化图
采用Pearson相关系数R衡量水位xn与航标绝对位移mn之间的具体线性相关程度:
(6)

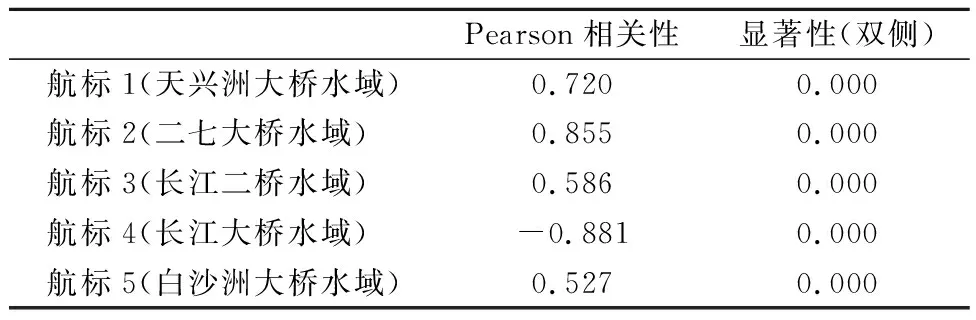
表1 相关性分析表
由表1可知,航标3、5与水位为切实相关,航标1、2、4为高相关.另有显著性(双侧)检验结果为0.000<0.01,这表明该结果具备了统计学意义上的显著性水平.因此,航标的漂移与水位的变化有较高的相关性.
3.2 航标漂移与水位变化关系模型构建
建立航标漂移量关于水位的一元线性回归模型、一元二次回归模型和一元三次回归模型为
Mn=a+bxn
(7)

(8)
(9)
式中:Mn为航标日均漂移量,m;xn为日均水位,m;a,a1和a2分别为回归方程常数;b,b1,b2,b3,b4和b5分别为两个回归方程系数.对二者进行一元线性、一元二次和一元三次回归分析,分析结果见表2,曲线拟合结果见图7.
R2(拟合优度或称为回归分析的决定系数)反映了自变量和因变量形成的散点与回归曲线的接近程度,其数值介于0~1.以上五个航标三次曲线的最高次项接近为0,二次曲线的拟合度明显高于线性曲线,说明数组的变化关系更符合二次方程.文中所建的模型具有统计学意义.

表2 航标漂移-水位变化分析结果

图7 航标漂移与水位拟合关系
3.3 实验结果分析与验证
航标位置经纬度数据采样频率为0.5 h/次,测量水深数据采样频率为1 h/次.实验过程将航标位置数据进行筛选,使航标数据与水位数据采样频率一致,数据呈一一对应关系.对上述的5个区域进行回归模拟,求出的实验结果见表3.

表3 拟合结果汇总
为验证模型的准确性,将2017年9月的日均水位数据代入拟合公式,分别求取每个航标的预测漂移量.计算航标预测漂移量与实际漂移量间的均方根误差(RMSE)结果见表4.
(7)


表4 均方根误差表
由表4可知,航标漂移预测结果与实际结果的均方根误差约为0.5 m,二次拟合模型可较好地反映长江武汉段航标的漂移量与水位之间的相关关系.
4 结 束 语
文中构建了基于卡尔曼滤波和K-means++算法的航标漂移模型,分析了长江中游武汉段航标漂移特性,模型可有效降低航标日常运行、维护和管理中的误报警率;基于回归分析方法,探讨了航标漂移量与水位之间的相关关系,建立了二次回归拟合模型;经实际数据验证,模型预测结果与实际数据吻合较好,误差约为0.5m,可应用于不同水位条件下的内河航标漂移距离估算.
