GPS导航接收机中可变增益放大器设计
2019-03-01黄海生王嘉齐
黄 敏,黄海生,李 鑫,王嘉齐
(西安邮电大学 电子工程学院,西安 710121)
0 引言
全球定位系统(global positioning system,GPS)是一种具有全方位、全天候、全时段、高精度的卫星导航系统[1]。对于GPS接收机来说,通信信道会随着时间的变化而变化,噪声的干扰以及环境的变化等因素的影响都会造成信号时强时弱,从而影响信号的处理。因此,电路中就需要自动增益控制电路(automatic gain control,AGC)根据接收信号的强度调节接收机链路的增益使输出信号基本达到稳定强度[2]。其中AGC电路的核心模块是可变增益放大器(variable gain amplifier,VGA),它的性能优劣直接影响AGC电路的性能。本文基于TSMC 0.18 μm互补金属氧化物半导体(complementary metal-oxide-semiconductor,CMOS)工艺设计一款增益范围在60 dB的可变增益放大器。
1 AGC电路概述
AGC电路是导航接收机中必不可少的模块。它可分为模拟AGC、数字AGC和混合AGC。本文采用的是控制部分为数字模块的混合AGC。其主要包括3个模块,可变增益放大器、脉冲宽度调制(pulse width modulation,PWM)式自动增益控制和脉冲宽度译码器。其中可变增益放大器为主要模块,产生不同的增益来调节信号强度,PWM式自动增益控制模块输出一个脉冲宽度调制信号用来调节可变增益放大器的增益,脉冲宽度译码器将脉冲宽度调制信号解调为五位二进制码来控制增益。
2 电路设计
2.1 VGA总体结构
图1为VGA的整体结构,由5位二进制码控制开关的5级放大电路(VGA5、VGA43、VGA21)组成[3]。其中5位二进制码控制位(B1~B5)通过控制5级放大电路的开关提供不同的增益,IF和IFN表示差分输入信号,IFN为IF相位相反的信号,IFO和IFON表示差分输出信号,IFON为IFO相位相反的信号。每级VGA放大电路(图2)由四级增益不同的差分电路串联而成,偏置电路为每级差分电路提供稳定的尾电压。其中一、三级由低电平有效的开关控制,提供高增益;二、四级放大管由高电平有效的开关控制,增益较低。这样,B1~B5不同的逻辑位控制输出不同的增益。其中VGA 5、VGA43 2个模块采用阻容级间耦合[4]方式,VGA21模块采用直接耦合方式,并在输出接有电压buffer,使得整个VGA可以适用于不同的负载阻抗且不会影响VGA的频率特性,以保证放大器的负载能力。负载接ADC后基本不影响VGA的增益。
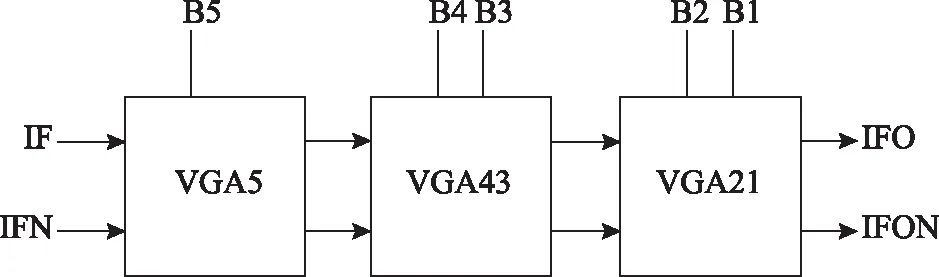
图1 VGA整体结构
2.2 VGA43模块设计
如图2所示,VGA43模块包括4个差分放大电路,每个差分放大电路的结构相同,但具体的参数不同即每个差分放大电路的增益不同。图2中B4N为B4的非,B3N为B3的非。B4和B4N控制着输入信号IF和IFN进入哪一个差分放大电路,经过前一级放大电路之后,再由B3和B3N控制着进入第二级放大电路,最终输出信号为IFN和IFON。根据B4、B3控制电平不同,共有4种不同的组合电路,这样就提供了4种不同的增益[5]。VGA5、VGA21模块与VGA43模块类似,其中VGA 5模块相当于将B4和B3控制信号由B5控制,VGA21模块将B4和B3换成B2和B1控制。其中差分放大电路的原理如图3所示。

图2 VGA43模块结构

图3 差分放大电路原理
对于本文所设计的电路来说,主要采用的就是图3所示的差分电路结构,因为差分电路具有抗干扰能力强、增大电压摆幅等优点。图3中:IB为尾电流;GND为地;VDD为电源;M0、M1为2个晶体管;△I为流经电阻R的电流。
由图3可以看出,电路的增益可表示为
(1)
式中:VIF、VIFN为差分电路输入电压;VIFON、VIFO为差分输出电压;Vout为输出电压;Vin为输入电压。
对于晶体管M0来说,输出电压VIFON可表示为
VIFON=△I·R
(2)
△I=gm·△V
(3)

(4)
对于晶体管M1来说,输出电压VIFO可表示为
VIFO=△I·R
(5)
△I=gm·△V
(6)

(7)
由式(1)~式(7)可得

(8)
式中:△V为流过M0和M1管子的电压;AV为电路的增益;gm为管子跨导。因此,gm和R的取值影响差分电路的增益。
图4所示为VGA43模块的电路。

图4 VGA43电路
图中:M0~M15为晶体管;R0~R3为电阻;B4和B4N为“互斥”的2个开关,通过数字信号控制;VBIAS为偏置电压。当B4导通时,增益由U0提供,U1关闭,不提供增益;相反,当B4N导通时,增益由U1提供,U0不提供增益。同理,B3和B3N的作用与B4和B4N相同。所以在电路设计时,采用以上结构通过切换开关[6]达到节省功耗的目的。此结构还有以下优点:1)电路结构简单,降低生产成本;2)数字控制具有更高的线性度。
由于设计中总体增益变化范围较大,所以VGA5、VGA43、VGA21模块中分别包括2级放大电路。由于每一级电路都需要直流偏置,所以每一级电路前需要加隔直电容。其中VGA5模块可以实现的增益范围为6~35 dB,VGA43模块增益范围为6~30 dB,VGA21模块增益范围为3~8 dB。
对于5级级联的VGA放大器,最大增益可表示为
AV=-(gm1gm2gm3gm4gm5)R
(9)
式中:gm1、gm2、gm3、gm4、gm5分别为1~5级的跨导;R表示负载电阻。电路采用多级级联不需要很大的晶体管尺寸和较大的偏置电流就可实现较高[7]的增益。由式(8)知道,增益与gm和R有关,因此改变gm和R都可以使增益改变,即

(10)
所以增益可通过改变W、L、R、I进行调节。
由图1可知,VGA21包含第五级放大和第四级放大,VGA43包含第三级放大和第二级放大,VGA5为第一级放大,通过B[5∶1]控制可以实现最小增益14 dB,最大增益73 dB,采用数字控制方式,实现60 dB增益范围。
2.3 偏置电路的设计
由于VGA的增益会受温度和工艺的影响。本电路采用恒定的GM偏置电路(如图5所示)为VGA提供偏置电压,来改善增益的变化特性。

图5 恒定GM偏置电路

(11)
(12)
(13)
式(13)中:I1、I2为流经M1和M2的漏端电流;VTH1、VTH2为M1、M2管子的阈值电压。
所以M1的跨导为
(14)
由式(14)可以看出,M1的跨导只与R和K有关,且K为比例系数,所以在温度与工艺恒定下,M1跨导只随R变化。
图6所示为本设计中所采用的偏置电路。

图6 本文采用的偏置电路
图中:IB_PTAT为理想电流源,M0至M30为晶体管。由恒定的GM偏置电路和基于电流镜的偏置电路组合而成,因为电流镜具有可以精确地复制电流而不受工艺和温度影响的特点,所以可使其值控制在合理的精度范围[8]内。并且可以通过b1、b2、b3控制端来产生不同的电流。M13和M14 2个管子将产生的电流转化为电压提供给VGA5、VGA43、VGA21模块。
3 实验与结果分析
本文电路采用TSMC 0.18 μm COMS工艺设计,供电电压取值为1.8 V,偏置电路中控制端b1=1.8、b2= 1.8、b3=1.8 V。在整体仿真电路中,控制端B5、B4、B3、B2、B1分别为01111、00000、11111 3种情况,在频率4.092 MHz下。利用Cadence软件中的Spectre对电路进行仿真[9]。
3.1 偏置电路仿真
从图7中可以看出,偏置电路在控制端全为高电平时提供的电流为60.24 μA,偏置电压为698.6 mV。
3.2 VGA5、VGA43、VGA21模块仿真
从图8、图9、图10仿真结果中可以看出:控制端B5为0和1时的增益[10]分别为5.356、34.88 dB;B4、B3为00、01、10、11的增益分别为29.04、20.84、14.34 、6.136 dB;B2、B1为00、01、10、11的增益分别为7.804、5.457、5.315、2.968 dB。

图7 偏置电路仿真结果
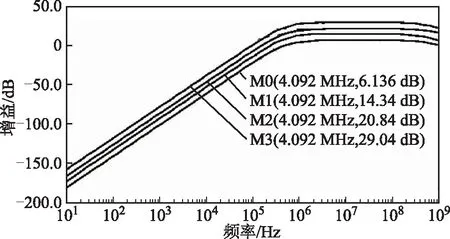
图9 VGA43仿真结果

图10 VGA21仿真结果
3.3 整体仿真
从图11仿真结果中可以看出,控制端B5、B4、B3、B2及B1为00000、01111和11111时,增益[11]分别为72.33、43.66、14.13 dB。
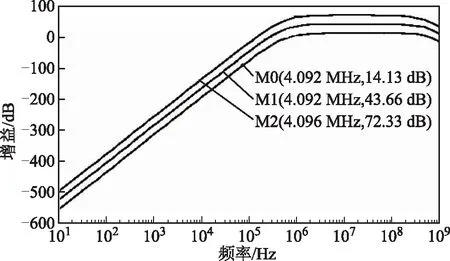
图11 VGA仿真结果
3.4 噪声系数与1 dB压缩点仿真
从图12、图13仿真结果中可以看出,在增益为72.33和43.66 dB时的噪声系数为19.68 dB,1 dB压缩点为-22.14 dBm。

图12 噪声系数仿真结果

图13 输入1 dB压缩点仿真结果
3.5 整体版图
VGA电路整体版图如图14所示,面积为306.2 μm×342.3 μm。
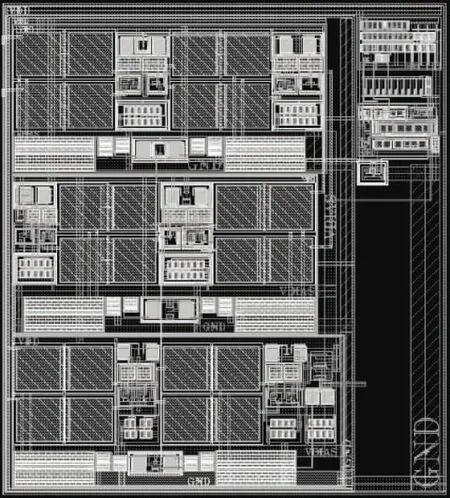
图14 VGA版图
经过仿真验证又与近年来已发表的有关文献中的VGA增益范围进行了比较,文献[5-8]的增益分别为56、35、54、40 dB。因此本文所设计的VGA有增益动态范围大的优势。
4 结束语
本文基于TSMC 0.18 μm COMS工艺设计了一款用于GPS导航接收机的可变增益放大器。其放大器采用了差分电路,偏置电路采用电流镜结构,通过控制5位不同的逻辑位而达到了大的动态增益范围。仿真结果表明,当电源电压为1.8 V,实现了60 dB的增益范围,噪声系数为19.68 dB,输入1 dBm压缩点为-22.14 dBm,可以用于GPS导航接收机中。
