一种高动态导航卫星信号的精确跟踪方法
2019-03-01易炯,陈倩
易 炯,陈 倩
(1.北京华力创通科技股份有限公司,北京 100193;2.中国电子技术标准化研究院,北京 100007)
0 引言
导航接收机的主要功能是接收导航卫星信号,进行伪码和载波的二维搜索,确定粗略的码相位和载波频率,然后进行载波和伪码跟踪、位同步、帧同步,在此基础上对各已同步卫星信号进行电文解调并计算其对应的伪距,最终进行定位测速授时(positioning velocity and timing,PVT)解算,计算出接收机的三维位置、速度和时间信息。导航接收机系统架构如图1所示。图1中:BDS为北斗卫星导航系统(BeiDou navigation satellite system)的英文缩写词;GPS为全球定位系统(global positioning system)的英文缩写词。
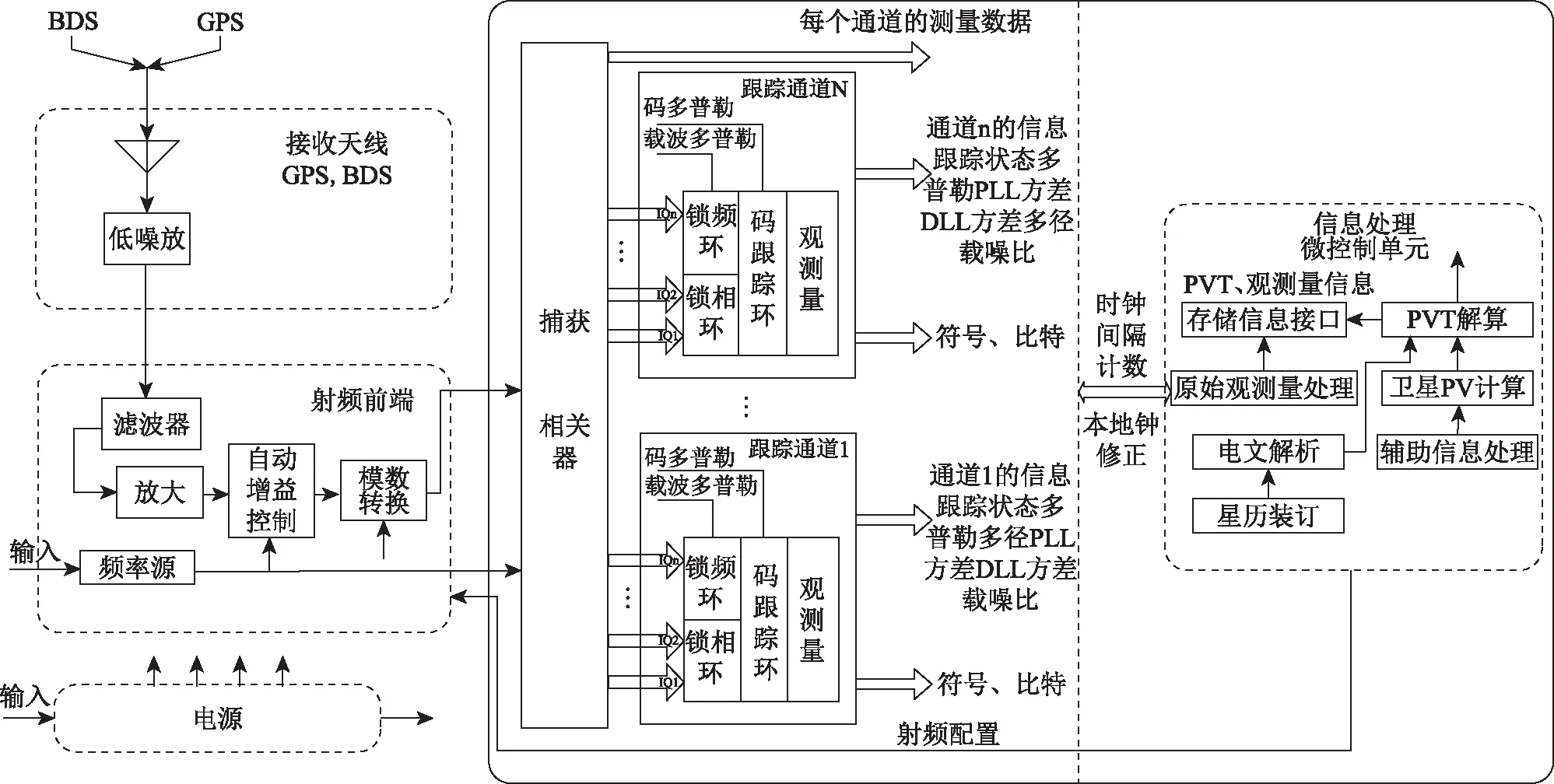
图1 导航接收机系统架构
跟踪环路是高动态接收机设计的核心部分,导航卫星信号的跟踪分为码跟踪和载波跟踪,载波跟踪环又分为锁频环和锁相环。跟踪环路一般按鉴别器、环路滤波器和压控振荡器的结构形成闭环。其中鉴别器的类型决定了环路的类型,即为延迟锁定环(delay lock loop,DLL)、锁频环(frequency locked loop,FLL)和锁相环(phase locked loop,PLL)中的某一种。跟踪环路的性能主要取决于码和载波的鉴别方式、环路滤波器以及环路更新频率。环路滤波器的噪声带宽和阶数决定了滤波器的性能。常规锁相环的噪声带宽较窄,能输出精确的载波相位测量值,且解调电文的误码率低,但对动态应力的容忍性较差。常规锁频环的噪声带宽较宽,能适应大的动态应力,但输出的载波相位测量值不够精确,且解调电文的误码率相对于锁相环而言较高。使用锁频辅助锁相,可以使接收机在动态应力小的情况下像锁相环那样精确地跟踪并测量载波信号,而在动态应力大的情况下又能像锁频环那样牢固地锁定信号或者能快速地重捕和嵌入信号[1-3]。一般接收机使用软件形式的载波辅助码环,且载波环的更新频率与环路的预检测累积时间一致,如使用Nms累积则环路更新周期为Nms,但这样接收机在高动态较弱信号环境会存在跟踪不稳定或定位不精确的问题。本文提出了一种使用载波环Nms累积1 ms更新、并通过硬件逻辑实现载波环辅助码环的跟踪方法,提高环路对动态应力的适应性,解决了高动态较弱信号环境下接收机的精确定位问题。
1 硬件载波环辅助码环
1.1 载波环辅助码环模型
由于码和载波在卫星端是同时钟源产生的,且码频率和载波频率之间为固定的比例关系,而接收机相对于卫星做径向运动所产生的码多普勒频率和载波多普勒频率分别与卫星端的码频率和载波频率成正比,因此接收端所接收到的卫星信号的载波频率和码频率仍然成固定的比例关系。载波环颤动比码环颤动的噪声要小几个量级,载波环辅助码环实际上消除了码环几乎所有在视方向上的动态以及接收机基准频率漂移所带来的影响[1],码环只需跟踪电离层延迟的动态加上噪声。利用载波和码之间的频率关系,环路的码频率控制字可表示为
(1)
式中:fcw为频率控制字(frequency control word)的英文缩写;fcwcode是码频率控制字;fcwcarry是载波频率控制字(实质上对应的是标称中频加上多普勒频偏后的频率);fRF为射频标称频率;fIF为中频标称频率;fs为采样频率;r为载波频率与码频率的比例因子。式(1)进行变换后可表示为
(2)
(3)
1.2 载波辅助码环的实现
现有的载波环辅助码环技术基本在后端软件中实现,由于字长效应和反馈延时,载波频率字除以比例因子的计算过程具有一定的偏差,由载波环得到的多普勒不能精确的体现到码环中,从而使得码环的频率字和码相位测量值的精度不高。在逻辑部分(以现场可编程门阵列(field programmable gate array,FPGA)为例)使用加法器、减法器和比较器等硬件逻辑来实现载波环辅助码环,可以避免软件方法中除法运算所带来的码频率控制字的计算误差和反馈延时,从而显著提高码频率控制字和码相位测量值的精度,在定位解算时无需使用载波相位平滑伪距[4]便能实现精确的定位测速。
在逻辑实现中判断(2)式右边的分子是否大于分母,即当(fRF-fIF)×232+fs×fcwcarry的累加值每大于r×232×fs时,产生一次提码脉冲,同时减去分母后继续累加。当有环路更新使能时,加上码环环路微调量,环路微调量为码环压控输出。
码频率控制字计算时,使用上面的提码脉冲作为进位信号,计算出多个码环进位信号的平均间隔周期,将该平均间隔周期作为码环环路的信号周期,然后根据该周期计算出码频率控制字。
2 环路累积和更新机制
考虑到使用场合、卫星信号的强度、卫星与接收机的径向速度,需要选择合适的环路累积和更新的方式。一般环路使用1 ms累积1 ms更新或者Nms累积Nms更新的方式。1 ms累积1 ms更新时环路的等效噪声带宽大[5]、跟踪灵敏度低且观测量精度较差,但更新迅速,适应于动态性较大的场合。Nms累积Nms更新时环路的等效噪声带宽小、可以有效地提高跟踪灵敏度以及观测量精度,但更新较慢,动态性能相对较差。用Nms累积1 ms更新时,对以上2种环路累积和更新方式进行了折衷处理,既能有效提高跟踪灵敏度和观测量精度,又能保证环路的动态适应性。
环路Nms累积1 ms更新的实现为
(4)
(5)
通过对包括当前1 ms在内的过去Nms的幅值进行累积,在1 ms中断下将累积值送入鉴别器,与随后的环路滤波器和压控振荡器一起进行闭环更新。
2.1 载波环累积和更新机制2.1.1 锁频方式
常用的锁频方式有叉积型、面向判决的叉积型和四象限反正切型三种。本文的鉴频方式使用四象限反正切,相较于其他2种鉴频方式,其更类似于一个最大似然估计器,在高低信噪比时均具有最佳性能,且鉴频输出的斜率与信号幅度无关[1]。鉴频输出用为
(6)

(7)
(8)
2.1.2 锁相方式
常用的锁相方式有经典COSTAS型、面向判决的COSTAS型、次最佳型和二象限反正切型4种。本文的鉴相方式使用二象限反正切,相较于其他3种鉴相方式,其实际相位差异位于-90°~+90°的范围内时,鉴相器工作保持线性,鉴相输出的斜率与信号幅度无关[1],在高低信噪比时均具有最佳性能。鉴相输出为
(9)
式中Δθk为鉴相输出。
1)载噪比估计。
当信号被正确跟踪,稳态锁定时,能量主要集中在即时I支路,即时Q支路可认为是噪声。定义信号和噪声能量分别为
(10)
(11)
式中:M为功率累积历元数;NBPk为即时Q支路Nms累积1 ms更新的功率进行M个历元累积的结果;WBPk为即时I支路Nms累积1 ms更新的功率进行M个历元累积与NBPk做差的结果。
信号的载噪比CN0可表示为
(12)
2)载波锁定检测。
环路的锁定检测用来检测信号锁定的质量好坏,进而判断环路是否正常地运行在锁定状态,以确定环路的下一步动作。定义载波锁相质量因子C2fk[6-7]为
(13)
(14)
(15)

在相位锁定时,C2fk的值趋于1.0。相位锁定检测可以根据容许的相位估计误差以及最低工作载噪比确定一个合适的锁定门限。
2.2 码环累积和更新机制
码跟踪环首先利用1 ms累积进行闭环跟踪,稳定跟踪2 s后码环切换到4 ms累积。码环的更新周期随累积时间变化。码环鉴相前先判断载波锁相质量因子,当载波锁相质量因子C2fk大于0.3时认为载波相位估计误差在容许的范围内,使用如下所示的归一化相干点积功率法进行码环鉴相为
(16)
式中:IE为超前I支路的累积值;IL为滞后I支路的累积值;IP为即时I支路的累积值;δcp为码相位误差估计。当锁相质量因子C2fk小于0.3时,使用如下所示的归一化非相干超前减滞后功率法进行码环鉴相为
(17)
式中:E为超前路的幅值;L为滞后路的幅值。
3 跟踪环路的总体实现
3.1 跟踪环路模型
锁相环一般噪声带宽较窄,能输出精确的载波相位测量值,且解调电文的误码率低,但对动态应力的容忍性较差。锁频环一般噪声带宽较宽,能适应大的动态应力,但输出的载波相位测量值不够精确,且解调电文的误码率相对于锁相环而言较高。使用锁频辅助锁相可以使接收机在动态应力小的情况下像锁相环那样精确地跟踪和测量载波信号,而在动态应力大的情况下又能像锁频环那样牢固地锁定信号或者能快速地重捕和嵌入信号[1-3],具体的跟踪环路实现框图如图2所示。
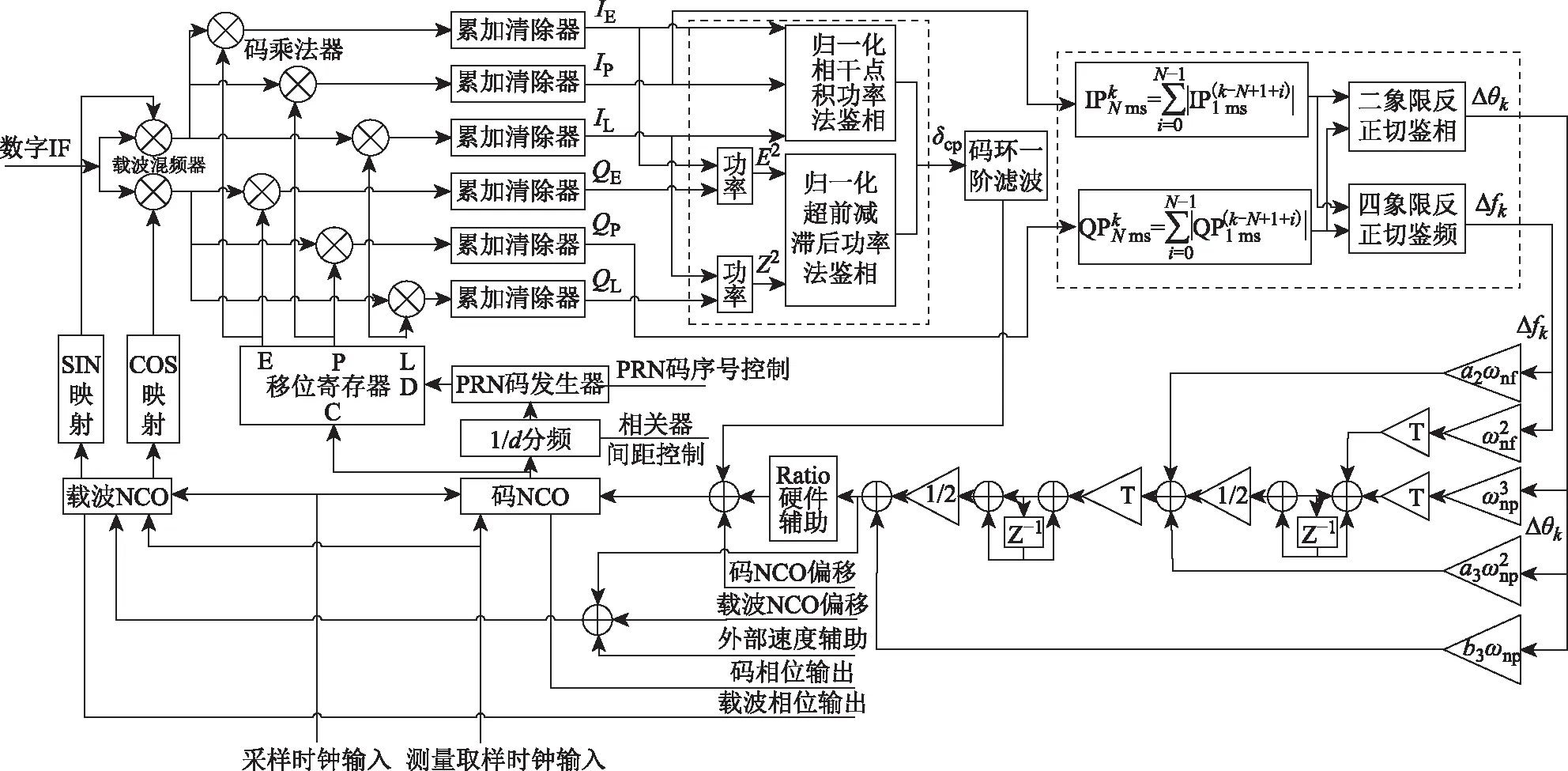
图2 导航接收机跟踪环路实现框图
图2中:ωnf为锁频环滤波器的自然频率;ωnp为锁相环滤波器的自然频率;ωnf和ωnp均根据环路滤波器的噪声带宽计算得出。
3.2 跟踪环路的实现
如图2所示,本文的接收机环路设计采用二阶FLL辅助三阶PLL滤波器模型进行环路滤波器建模,其中:ωnf=1.89Bnf;ωnp=1.27Bnp;a2=1.414;a3=1.1;b3=2.4;Bnf为锁频环滤波器的噪声带宽;Bnp为锁相环滤波器的噪声带宽。
当鉴相输出Δθk和鉴频输出Δfk均输入环路滤波器,此时为二阶锁频辅助三阶锁相,当频差较大时,鉴频输出起主要作用,当相位误差减小到一定程度,鉴相输出起主要作用。当Δfk=0,只输入Δθk时,此时为三阶锁相环路。当Δθk=0,只输入Δfk时,此时为二阶锁频环路。
载波数控振荡器(numerically controlled oscillator,NCO)偏移与环路滤波结果以及外部速度辅助量相加作为控制载波数控振荡器的相位累加字,使载波数控振荡器输出一个包含载波多普勒频移在内的中频,载波NCO偏移量为开环条件下(环路滤波输出不反馈且外部无速度辅助)载波数控振荡器输出的标称中频频率[8]。同理,码NCO偏移量为开环条件下码数控振荡器输出的标称码频率。
4 实验及结果分析
为了验证本文提出的跟踪方法的性能,按表1仿真产生接收机的运动轨迹(50Hz更新),以状态1为初始状态,然后按状态2~15进行循环,共迭代4次。图3中3个子图分别为接收机的速度、加速度和加加速度的变化过程。
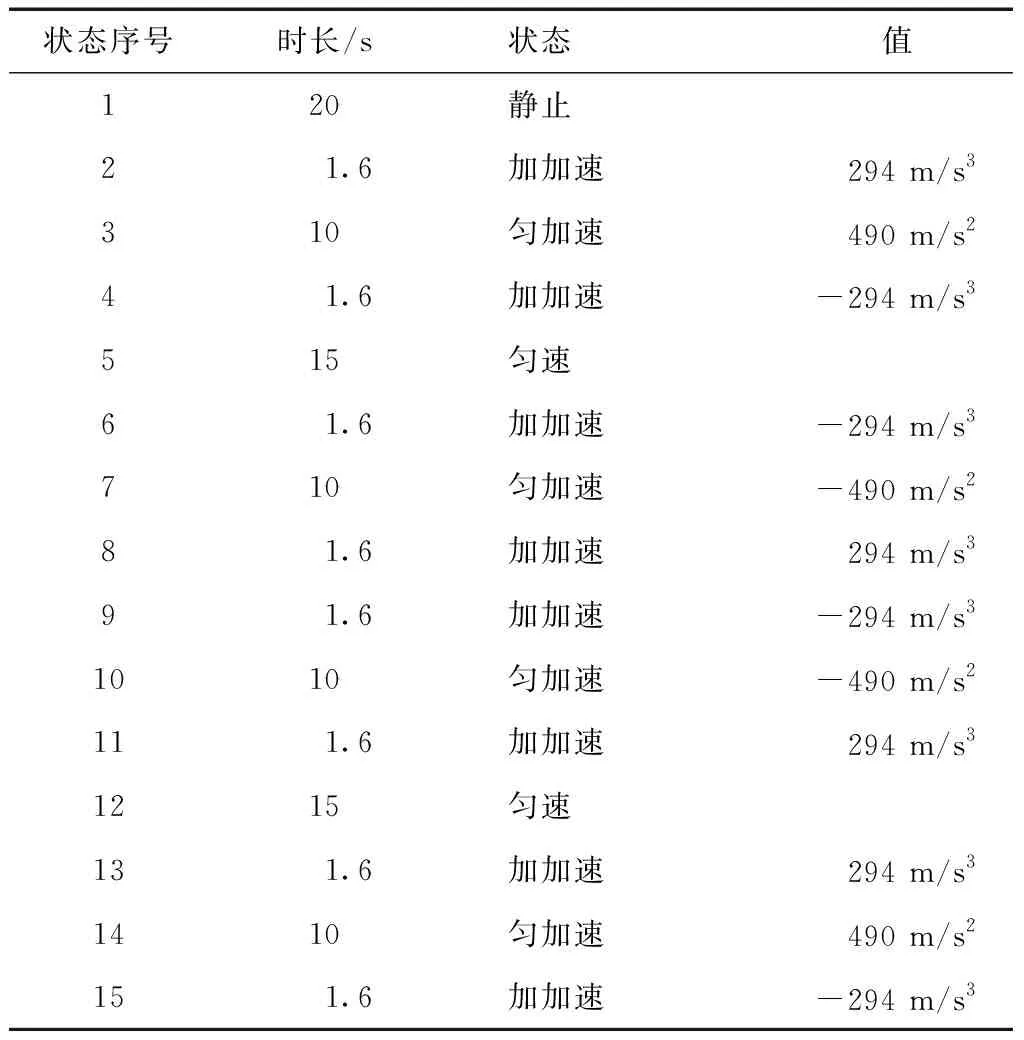
表1 导航接收机仿真运动状态

图3 导航接收机仿真运动状态变化曲线
使用华力创通科技股份有限公司的数仿软件,导入前文仿真产生的接收机运动轨迹,生成动态场景,并通过华力创通科技股份有限公司的模拟器HWA-GNSS-7300实时产生BD2 B3+GLS L1双模导航信号。使用OEM板接收模拟器产生的导航信号进行测试,实验平台如图4所示。测试时将模拟器输出的信号功率电平调整为-133 dBm,接收机锁频环带宽设置为10 Hz,锁相环带宽设置为18 Hz。载波环的累积和更新方式分别选择1 ms累积1 ms更新、4 ms累积1 ms更新和4 ms 累积4 ms更新,码环先利用1 ms累积1 ms更新进行闭环,稳定跟踪2 s后切换到4 ms累积4 ms更新。对BDS 6号星(IGSO卫星)进行实测的载波环状态分别如图5~图7所示,BDS 6号星为倾斜地球同步轨道(inclined geo-synchronous orbits,IGSO)卫星,图5~图7中各子图分别为鉴相输出、鉴频输出、环路滤波输出的原始多普勒和载波相位锁定因子。

图4 实验平台


图7 4 ms累积4 ms更新时的环路状态
通过对比可知4 ms累积1 ms更新时的鉴相输出相位误差与4 ms累积4 ms更新时相当,但显著优于1 ms累积1 ms更新时的结果。4 ms累积1 ms更新时的鉴频输出频率误差明显优于1 ms累积1 ms更新和4 ms累积4 ms更新时的结果。
表2为载波环使用4 ms累积1 ms更新时,用导航模拟器自带的定位精度评估软件对7 440个连续定位结果进行评估,所生成的定位精度评估结果。由该结果可知本文提出的高动态环路设计能满足水平10、高程15 m的常规定位精度要求。

表2 定位精度评估结果 m
5 结束语
本文对高动态卫星导航接收机跟踪环路进行了详细分析,讨论了载波环辅助码环的机理、环路累积和更新机制,提出了使用硬件逻辑实现载波环辅助码环、环路Nms累积1 ms更新的跟踪环路实现方法,在保障接收机动态性能的同时能保证较高的跟踪精度。使用导航模拟器对接收机性能进行了测试,实测表明该方法可以在294 m/s3的加加速度、490 m/s2加速度的动态环境下正常工作。该方法为进一步研究高动态环路提供了参考方案,并在实弹中进行了成功应用,实弹打靶精度较使用传统跟踪环路的接收机有了大幅提升。
