无人水面艇自主导航技术
2019-02-27胡常青何远清文龙贻彬杨义勇
胡常青,朱 玮,何远清,文龙贻彬,杨义勇
(1.中国地质大学(北京)工程技术学院,北京100083;2北京航天控制仪器研究所,北京100039;3.青岛海洋科学与技术试点国家实验室,青岛266237)
0 引言
无人水面艇(Unmanned Surface Vehicle,USV)(简称无人艇)是一种具有自主航行、自动作业能力的水面平台,通过搭载不同的任务载荷完成不同任务,尤其适用于执行危险、枯燥及不适于有人船只任务执行的场合。相比于常规有人船,它具有作业成本低、能够完成浅滩/近岸等复杂海域的作业任务、环境适应性强、全天时等特点。在民用方面,可以用于测绘、勘探、环保监测、安防巡逻等领域。在军事方面,可用于排雷、探潜、电子对抗、侦察等领域。
无人艇自主导航技术是指根据作业区域已知的地图信息,利用无人艇自带的导航和环境感知等多传感器获得的实时信息,制订航行路径并根据现场障碍物信息实时调整,完成预定的作业任务。自主导航技术可分为导航定位技术和路径规划技术。导航定位技术是指无人艇通过搭载的导航设备精确获得无人艇自身的位置、速度、姿态等航行信息,是实现无人艇水面自主航行的前提。无人艇导航定位不仅要求位置精确,而且还要求其具备可靠性和抗干扰能力。路径规划技术则是通过综合考虑无人艇作业任务效率、航行约束条件与水面航行环境,进行全局或局部路径规划,保障无人艇水面高效、安全航行,是水面航行智能化水平的关键。
在实际航行和作业过程中,长时间航行和复杂海况给无人艇的自主导航带来很大挑战。长时间航行对导航精度和可靠性要求很高,复杂海况表现为恶劣的自然气候环境,对导航设备的实时、连续、稳定、可靠工作带来影响。另外,海浪对雷达、视觉传感器和水下避障声呐等传感器的正常工作也会产生影响。复杂海况还表现为错综复杂的周边态势,例如:港口中密集的船只,水下不可预知的浅滩、水草、渔网等。如何可靠识别障碍物并制订安全的航路,给无人艇的自主导航带来了很大挑战。图1和图2为复杂海况的不同表现。
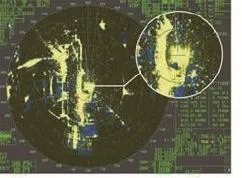
图1 干扰下雷达成像图Fig.1 Diagram of radar imaging under interference

图2 复杂的港口及航道Fig.2 Ports and waterways under heavy traffic
1 无人艇导航定位技术
在不同的任务阶段,无人艇对导航定位精度的要求也不同。当无人艇进出港口或靠岸停泊时,导航定位精度需要达到分米级,一般的导航定位手段无法满足需求,还需要借助环境感知系统对当前周围环境进行识别和判断,完成精确导航定位。按照GB50139⁃2014航道通航标准,不同等级航道的要求不一样,其对无人艇航行时定位和航迹保持精度的要求也不一样。当无人艇随母船远海作业时,还面临在自动布放回收过程中与母船高精度的相对位置定位问题。
传统的惯性导航具有信息全面实时与连续、完全自主、不受地域限制和人为因素干扰等重要特性,但它的导航误差会随时间积累,且成本相对较高。卫星导航技术相对成熟并在各领域得到了广泛应用,但它易受干扰和诱骗,进而易影响水面航行的作业效率和安全。
不同的导航方式有各自的优缺点,因此,与无人机、无人车类似,将惯性导航与卫星导航、其他导航方式结合起来的组合导航已成为无人艇导航定位的主要方式,如图3所示。
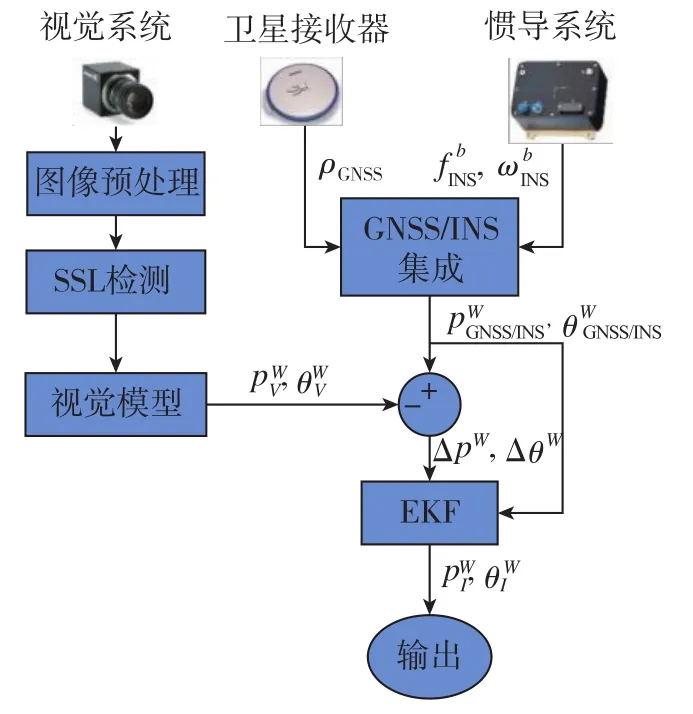
图3 GNSS/惯导/景象匹配组合导航Fig.3 GNSS/INS/image matching integrated navigation
1.1 即插即用全源组合导航技术
从实用性和经济性考虑,目前无人艇以卫星/惯性组合导航为基础导航,再根据在不同的作业场景中使用的传感器进行不同导航信息误差的修正,实现即插即用导航功能,如图4所示。目前,典型的组合方式有以下几类:
1)捷联惯性/卫星组合系统是目前最基础的一种导航系统配置。军用无人艇考虑到安全性和高可靠性,且有时需要为搭载的鱼雷、低空导弹、自动武器站等任务设备提供高精度局部基准,一般需采用高精度惯性导航设备与卫星导航设备组成组合导航系统。民用无人艇搭载的设备数量和种类不多,考虑到经济性,采用MEMS或低精度光学陀螺惯性导航设备与卫星导航进行组合。
2)地磁/重力场等地球物理信息匹配导航具有无积累误差的特点,可以用此信息对无人艇位置误差进行不定期的修正。目前,重力、地磁匹配定位受模型分辨率、测量精度等因素的制约,只能达到百米级定位精度。美国国防部研制的纯地磁导航系统的地面和空中定位精度可达到30m。
3)地形或景象匹配组合技术是进一步提高系统导航位置精度的重要手段。在无人艇已经获得分辨率较高的电子海图和水下地形图的情况下,地形匹配导航可以达到较高的定位精度。
4)无人艇还可以结合艇上配备的相关载荷设备进行辅助导航。其中,水声 Doppler测速仪(DVL)测速误差小、精度高,将其与低精度惯性导航设备进行组合,可以弥补惯性导航设备精度随时间降低的问题。对于因载体转弯、侧滑造成的DVL粗差,可以利用无人艇搭载的水下侧扫声呐图像数据或水面的光学设备图像数据推算出无人艇侧向速度,检测并剔除DVL侧向速度粗差,从而改善组合导航性能。针对由航向误差导致的航位推算误差增大的问题,可以利用光电设备的海天线成像信息获得的无人艇姿态信息来修正低精度惯性导航设备的姿态误差。
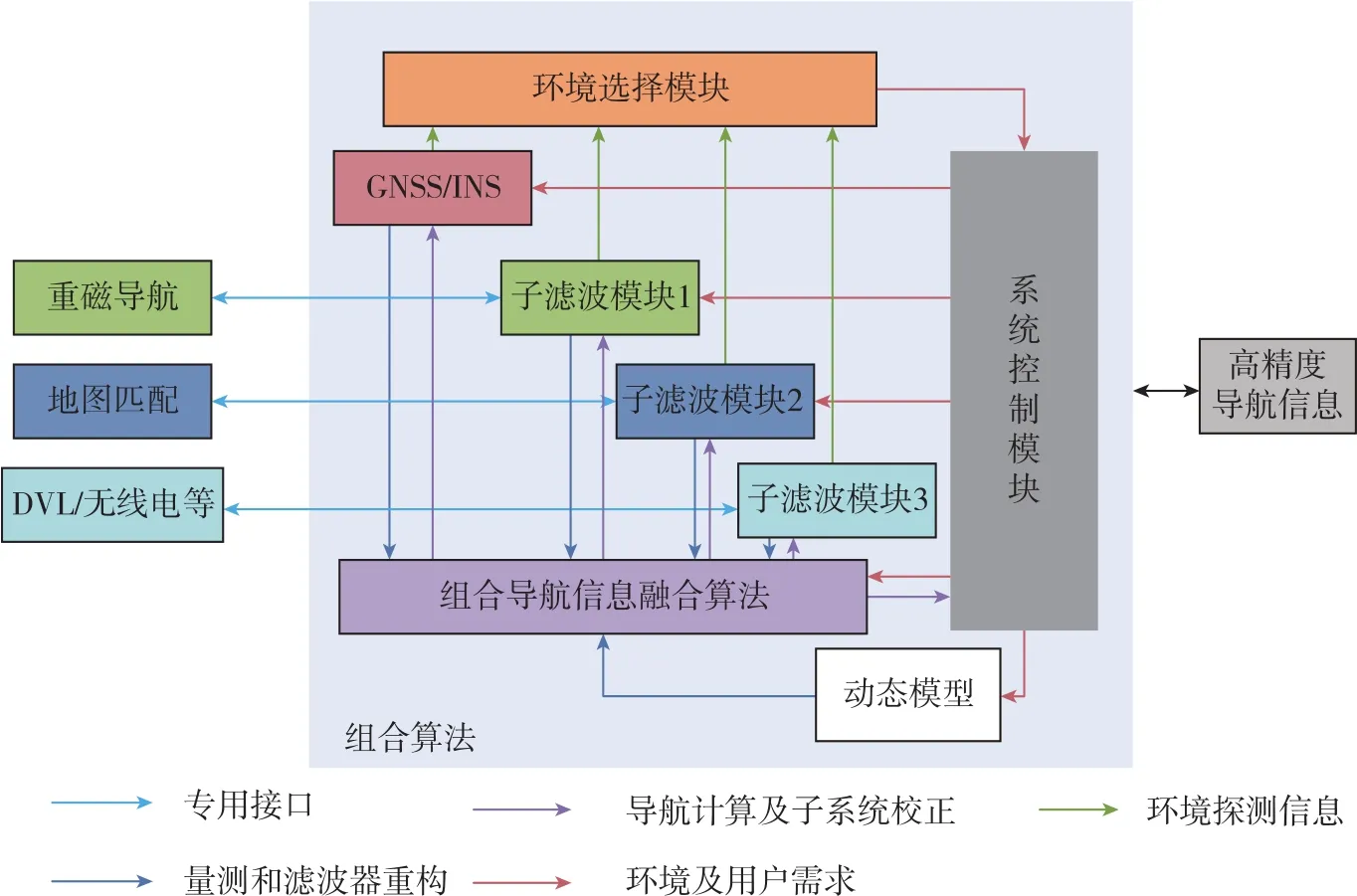
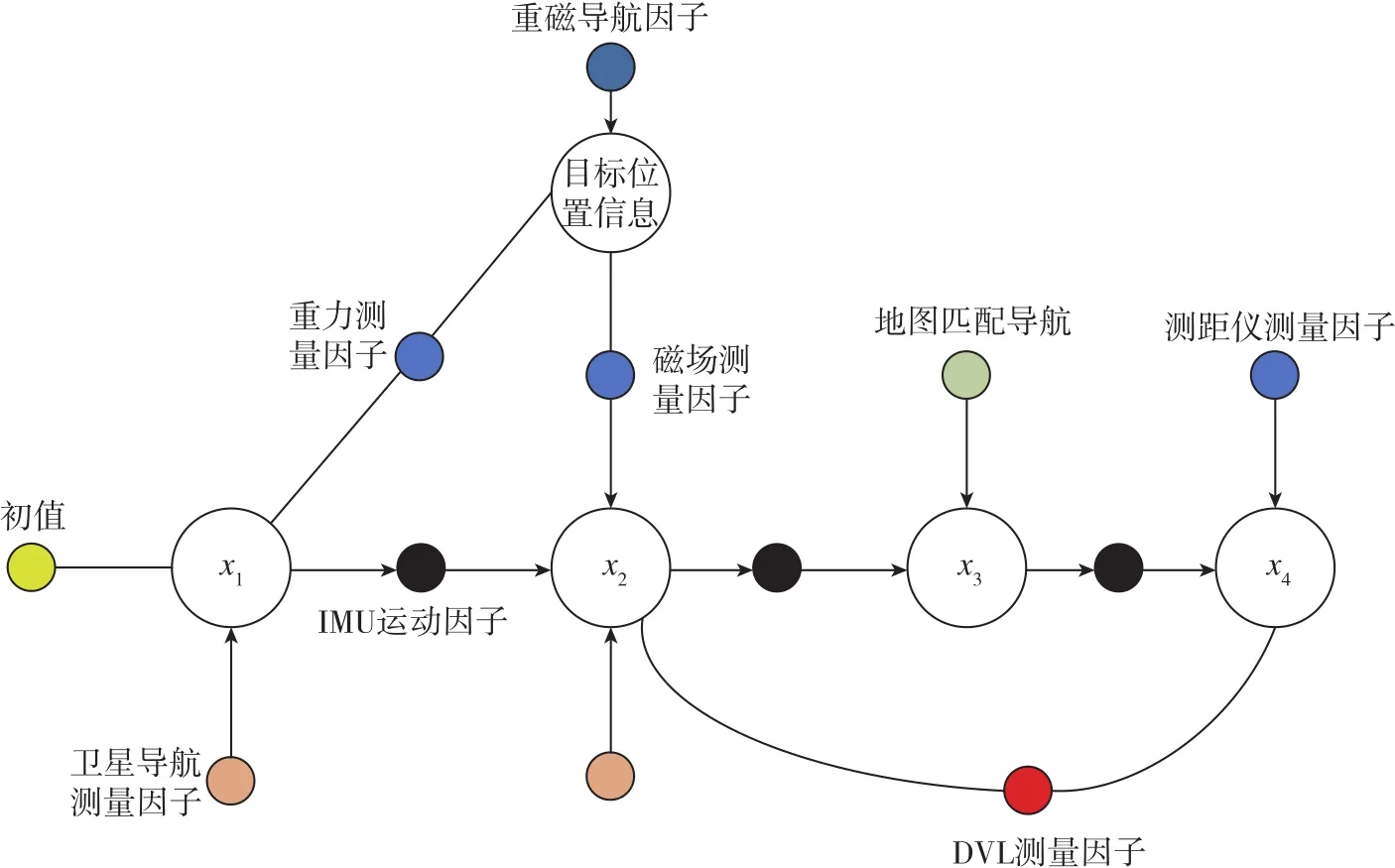
图4 无人艇即插即用组合导航技术Fig.4 Plug-and-play integrated navigation of USV
1.2 组合导航完好性监测技术
无人艇在复杂水面航行条件下,存在外部欺骗的问题,且基于多传感器的导航系统容易产生故障信息。因此,组合导航完好性监测技术也逐渐从最开始的航空领域被应用到了无人艇的航海领域。
水面组合导航完好性监测技术是通过建立导航系统误差完好性风险模型,提高系统在欺骗式干扰及恶劣水面环境下的系统故障检测与排除概率,改善组合导航系统的完好性监测性能,确保当系统的导航精度超出给定航行阶段所要求的特定区间时,系统能及时发现故障并告警,如图5所示。
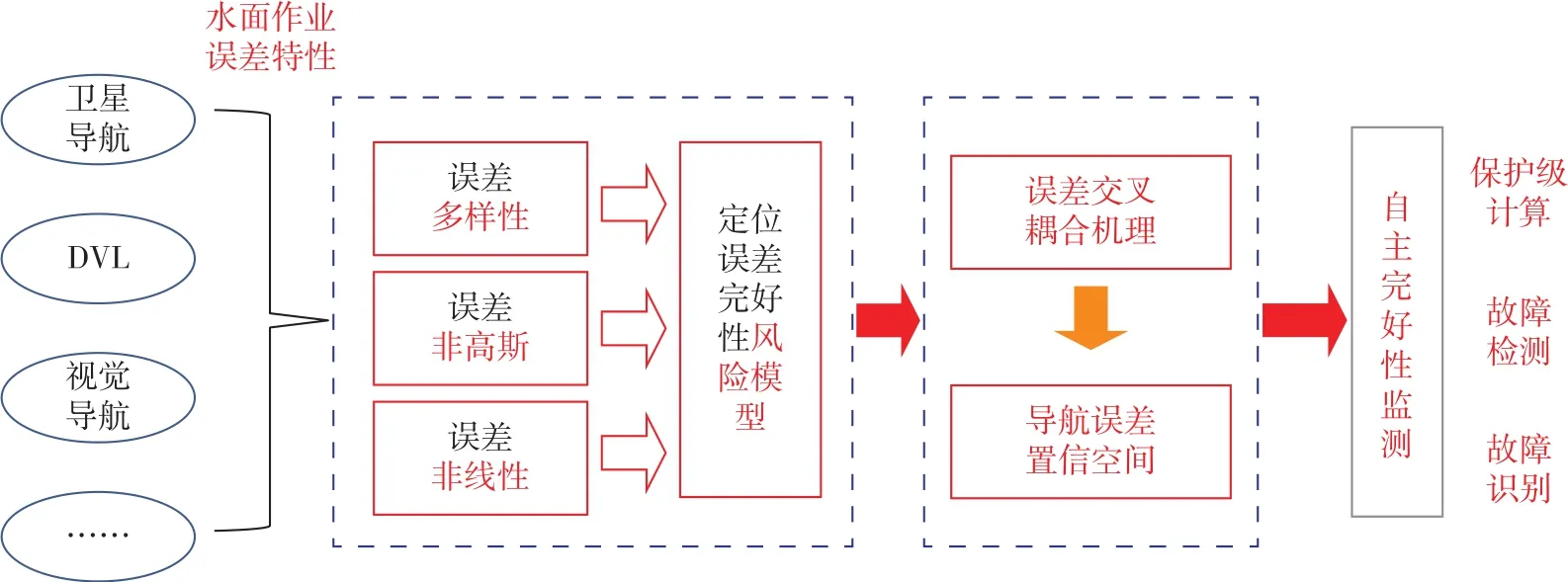
图5 无人艇导航完好性简化采样模型Fig.5 Simplified sampling model of navigation integrity monitoring for USV
采用松/紧组合结构、完好性监测算法和一些故障检测算法,在基于辅助的RAIM算法的基础上增加外部辅助设备(如惯性导航系统、DVL等)以提高完好性监测性能,不仅增加了检测系统的故障灵敏度,而且改善了捕获故障的能力,从而显著提高了组合导航系统的整体可靠性和准确性。
1.3 协同导航技术
在复杂海况下,许多任务需要多艘无人艇协同作业才能够完成。近年来,越来越多的学者和研究机构开展了针对多无人艇协同作业的研究,协同导航技术可以有效地提高复杂海况下单一无人艇的导航定位精度和可靠性。协同导航技术需要构建包括岸基基站、有人艇、无人艇、无人机、无人潜航器在内的海陆空天一体化通信网络,通过各节点间的相对定位,将单无人系统自身信息和其他无人系统的信息进行融合来提高定位精度,实现复杂海况下无人艇的协同导航。
对于无人艇的协同导航技术,目前研究得比较多的是主从式无人/有人艇群的协同导航技术。如图6所示,它是使配备较低精度导航设备的无人艇USV2将其自身的信息和配备高精度导航设备的领航艇USV1(或是有人母舰艇)的信息进行融合来提高其导航精度。针对主从式多无人艇系统中存在多领航艇和单领航艇两种协同导航定位方法,关键是需精确测量出领航艇与跟随艇之间的相对距离,这方面主要工作集中于对UKF、EKF等导航滤波算法的研究,以及采用信息重建的状态估计、最小方差等方法来补偿声速误差、时延。

图6 主从式无人艇协同导航Fig.6 Cooperative navigation of master-slave USVs
跨域异构平台间的协同导航包括无人机与无人艇协同导航,以及无人艇与无人潜航器协同导航。此时,协同导航主要利用不同导航系统的误差特性,构建信息双向融合滤波器,同步修正两者的导航信息误差,提高各自无人系统的定位与航向精度,并提高导航的可靠性。例如,无人潜航器、无人艇或无人机可以利用各自获得的较为精确的地球物理信息匹配导航结果,来互相修正和补充,以提高导航的精度和可靠性,如图7所示。美国的诺斯罗普⁃格鲁曼公司已开发了一种全新的无人系统控制架构。在该架构下,无人艇与无人潜航器通过水声通信完成协同定位,无人艇与无人机使用微波通信自组网完成协同定位。

图7 无人艇与无人潜航器协同导航Fig.7 Cooperative navigation of USV-UUV
2 无人艇路径规划技术
无人艇路径规划技术是指综合考虑自身航行性能、作业效率和水面航行环境,寻找一条满足预期要求的路径,并使无人艇在航行过程中安全地绕过所有障碍物。无人艇的路径规划算法可分为全局路径规划算法和局部路径规划算法。
全局路径规划是基于已知的海图信息和航区内障碍物、危险区域信息等构建适当的环境模型,根据需求从环境模型中搜索出一条满足需求的安全路径,如图8所示。全局路径规划的第一步是要建立环境模型,常用的环境模型构建方法主要有几何法、栅格法、构形空间法、可视图法、拓扑法和概率航迹图法等。但上述方法都有着各自的优缺点:可视图法减小了搜索范围但不够灵活,不适用于存在圆形障碍物的空间;拓扑法降低了高维空间的规划难度,但网络的建立过程复杂;栅格法易于实现,但只适用于一致性空间。因此,在实际情况中需要根据真实环境条件选择不同方法。环境模型建立后,到达最终目标点需要相应的路径规划算法,如贪婪算法、A星算法、Dijkstr算法等。基于不同的环境表示,有不同的路径搜索算法。同时,环境建模对搜索算法的效率也有很大的影响。因此,为了得到一条最优的全局路径,可以改进环境建模方法或改进路径规划算法,但更重要的是要把两者结合起来考虑。如图9所示,基于栅格法和A星算法提出的theta star方法既适用于非一致空间(最小转角可以不是45°),也有着比A星算法更佳的搜索效率。
复杂海况和良好海况下的环境模型完全不同,会导致环境感知算法难以适应。同时,当在一些船只较多的主航道附近作业时,如何制订这些合作/非合作目标避碰策略也是一个亟待解决的问题。在巡逻执法或军事应用中,甚至还面临非合作、对抗目标,这就给局部路径规划带来了较大的挑战。无人艇局部路径规划算法需要根据环境感知系统实时测量周围环境中的信息,动态地调整、修正局部路径,确保无人艇在航行过程中的安全。当前常用的Bug算法、人工势场法、动态窗口方法、曲率速度方法、Dstar算法等局部路径规划算法有着各自的优缺点:人工势场法容易陷入局部极值点;Bug算法效率低,返回原有路径的方式较为原始;动态窗口法考虑了无人艇的运动约束,能够较好地满足局部路径规划的需求,但是要耗费大量时间进行调参;Dstar算法实时性强,但不能快速返回原有路径。
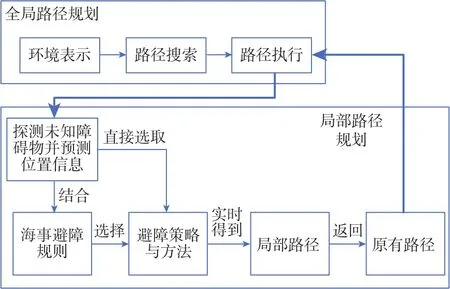
图8 路径规划示意图Fig.8 Diagram of path planning
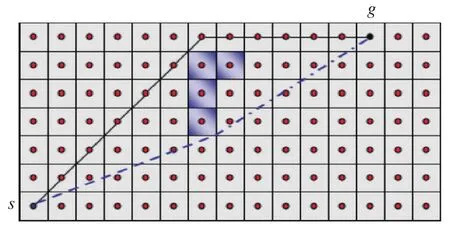
图9 theta star算法(虚线)与Astar算法(实线)Fig.9 Comparison of theta star algorithm(dotted lines)and Astar algorithm(solid lines)
由于全局和局部路径规划方法各自存在局限性,两种方法都无法满足无人艇在复杂海况下的航行要求。因此,自适应智能路径规划技术是解决复杂海况下的路径规划问题的一种可行方法。
2.1 自适应智能路径规划
自适应智能路径规划技术利用多传感器信息融合技术获取水上、水下障碍物信息,将无人艇导航信息及外界环境风浪流信息结合电子海图的地图信息,采用分层策略,自适应地调整路径算法和路径规划算法参数,动态规划无人艇的航行路径,以适应复杂的水面环境,如图10所示。
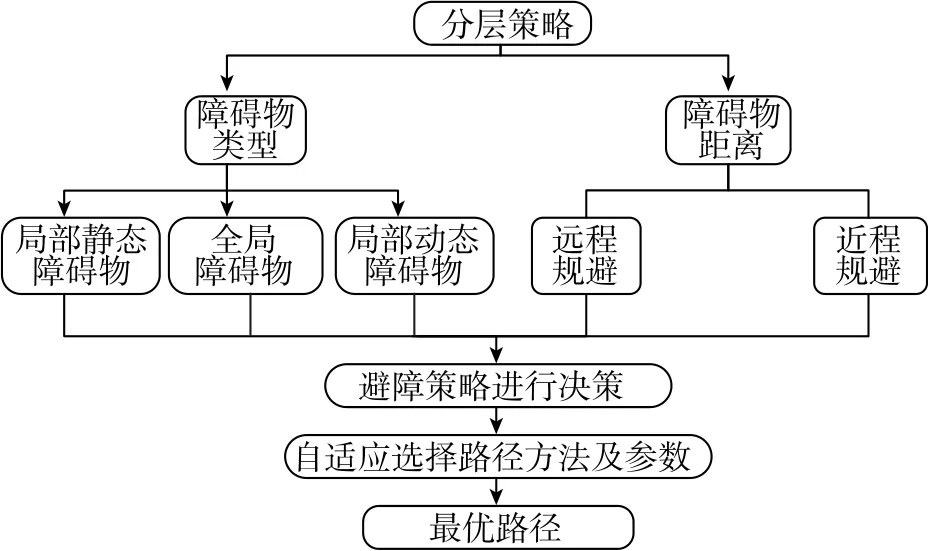
图10 自适应智能路径规划技术示意图Fig.10 Schematic diagram of adaptive intelligent path planning technology
根据检测到的障碍物类型的不同,将障碍物分成全局障碍物与局部障碍物,及静态障碍物与动态障碍物。针对障碍物的类型特点,采用分层思想,自适应地选用路径规划算法与避障方案,以适应无人艇复杂多变的航行环境。其主要避碰策略为:利用栅格法、几何法等方法建立环境模型,并根据障碍物信息及相关约束条件(航行规则、航行时间或能耗等)建立不同层次的路径(全程、远程、近程、应急),在航行过程中根据获取的实时动态的障碍物信息选择规避方式。当运动障碍物的信息数据不能被有效获取时,采用应急危险规避方式,使无人艇在密集障碍物的环境下能够自主避障。
2.2 智能环境感知技术
在无人艇局部路径规划中,重要的是能够实时感知航行区域周边的环境态势。由于水面环境的复杂性,单一的传感器环境感知技术不能适应复杂海况,容易受到天气、距离、传感器自身分辨率等因素的影响,产生较大误差甚至不能工作。这时,需要利用无人艇上搭载的电子海图、光学设备、导航雷达、前视声呐等多种传感器,来弥补单一传感器在复杂海况下的局限性,获取障碍物的三维立体信息,如图11所示。但使用多传感器,需要解决如何从探测收集到的大量既有重叠性又有互补性的环境数据中提取有用的信息,从而正确、可靠地进行环境感知的问题。随着人工智能技术的发展,将传统方法与基于神经网络和数据融合的深度学习技术相结合,利用深度挖掘与智能融合技术,可以不断提高目标检测率且能够更加充分地挖掘信息,从而获得更好的环境感知与目标识别的效果。近年来以深度学习为代表,结合神经网络、数据融合的人工智能技术在环境感知上得到了广泛应用与发展,相比于传统方法,其具有适应性强、精度高、感知能力强的特点。
一方面,使用深度学习技术可以多重组合学习底层信息,然后利用多层感知器逐层压缩,发现单一传感器数据的本质特征表述,能够提高识别和分类的准确性。通过提取不同目标的几何特征、不变矩特征和纹理特征,采用基于组合特征和主分量分析降维的分级BP神经网络进行目标识别,能较有效实现无人艇视觉系统对海面3大类常见目标的分类识别,识别正确率达到85%以上。
另一方面,使用深度学习、数据融合等算法来充分挖掘多元异构数据间的有效信息,挖掘现有方法无法触及的特征信息,能够提高系统对环境信息的利用率和环境感知能力,从而构建一个信息全面、立体、可靠的无人艇三维环境模型,让无人艇在复杂多变的环境中快速高效地完成任务。

图11 环境感知与信息融合Fig.11 Block diagram of environment perception and information fusion
3 总结与展望
综上,将无人艇自主导航技术后续发展趋势分析如下:
1)即插即用全源导航是无人艇导航发展的趋势。无人艇以卫星/惯性组合导航为基础导航,再根据在不同的作业场景中使用的传感器进行不同导航信息误差的修正,如完整重磁等地球物理信息和地形或景象信息对位置误差的修正,DVL测量信息对系统速度误差的校正,并可根据不同场景变换快速移除引入的测量节点,以降低系统的计算量。
2)综合环境约束和无人艇的几何约束、物理约束获得全局最优路径将是后续研究重点。全局路径规划算法将逐渐从单目标规划最优向多目标规划综合最优转变,许多最优算法如遗传算法、粒子群算法和蚁群算法等也将被广泛使用。
3)局部路径规划需要在环境完全未知且有动态障碍物的动态时变环境下,准确可靠的预测障碍物位置信息,并采用分层策略自适应地调整路径算法和参数。
4)深度学习、数据挖掘、信息融合等人工智能技术将在环境感知方面发挥主导性的作用。多层感知器、多重组合学习可以提高环境感知信息的本质特征表述。同时,数据融合算法可以充分挖掘多元异构数据间的有效信息,从而为无人艇构建一个信息全面、立体、可靠的三维环境模型。
作为无人艇的关键技术之一,自主导航技术决定着无人艇自主航行能力的高低。随着传感器、人工智能和物联网等技术的发展,导航定位、完好性监测、自主环境感知和路径规划技术也将得到进一步发展,无人艇将向着实用化、自主化和智能化方向迈进。
