Reliable flight performance assessment of multirotor based on interacting multiple model particle filter and health degree
2019-02-27ZhiyaoZHAOPengYAOXiaoyiWANGJipingXULiWANGJiabinYU
Zhiyao ZHAO,Peng YAO,Xiaoyi WANG,*,Jiping XU,Li WANG,Jiabin YU
aSchool of Computer and Information Engineering,Beijing Technology and Business University,Beijing 100048,China
bBeijing Key Laboratory of Big Data Technology for Food Safety,Beijing Technology and Business University,Beijing 100048,China
cCollege of Engineering,Ocean University of China,Qingdao 266100,China
Abstract Multirotor has been applied to many military and civilian mission scenarios.From the perspective of reliability,it is difficult to ensure that multirotors do not generate hardware and software failures or performance anomalies during the flight process.These failures and anomalies may result in mission interruptions,crashes,and even threats to the lives and property of human beings.Thus,the study of flight reliability problems of multirotors is conductive to the development of the drone industry and has theoretical significance and engineering value.This paper proposes a reliable flight performance assessment method of multirotors based on an Interacting Multiple Model Particle Filter(IMMPF)algorithm and health degree as the performance indicator.First,the multirotor is modeled by the Stochastic Hybrid System(SHS)model,and the problem of reliable flight performance assessment is formulated.In order to solve the problem,the IMMPF algorithm is presented to estimate the real-time probability distribution of hybrid state of the established SHS-based multirotor model,since it can decrease estimation errors compared with the standard interacting multiple model algorithm based on extended Kalman filter.Then,the reliable flight performance is assessed with health degree based on the estimation result.Finally,a case study of a multirotor suffering from sensor anomalies is presented to validate the effectiveness of the proposed method.©2019 Chinese Society of Aeronautics and Astronautics.Production and hosting by Elsevier Ltd.This is an open access article under the CCBY-NC-ND license(http://creativecommons.org/licenses/by-nc-nd/4.0/).
KEYWORDS Health degree;Interacting multiple model;Multirotor;Particle filter;Reliability and safety;Reliable flight performance;Unmanned aerial vehicles
1.Introduction
As a type of vertical take-off and landing Unmanned Aerial Vehicle(UAV),multirotor has been applied to many military and civilian mission scenarios such as real-time monitoring,search and rescue,pipeline or power patrol inspection,environmental monitoring,and agricultural plant protection.1,2From the perspective of reliability,it is difficult to ensure that multirotors do not generate hardware and software failures or performance anomalies during the flight process,including communications,sensors,propulsion systems and airframe structures.3These failures and anomalies may result in mission interruptions,crashes,and even threats to the lives and property of human beings.In recent years,with the promotion of multirotor applications,the expansion of market size,and the increase in the number of individual users,the study of flight reliability problems of multirotors is conductive to the development of the drone industry and has theoretical significance and engineering value.
Prognostics and Health Management(PHM)technology uses system models,observations,and related algorithms to detect process anomalies,assess performance(health)degradation,and predict remaining useful life,and then formulate appropriate maintenance and operation strategies to ensure that the system performs as expected.4In the field of civil aviation,the airborne system of advanced civil aircraft has already been equipped with advanced PHM systems for highly reliable flight service.5-7However,there exists no mature PHM system for multirotors.From the perspective of academic research,there exist many studies concentrating on the PHM issue of UAVs including multirotors.8According to the on board components of interest,these studies can be basically classified into five categories:PHM for airframe structure,9,10actuators,11,12sensors,13,14fuel or batteries,15,16and communication.17,18A detailed description is presented in Ref.3.The existing studies mentioned above usually focused on fault diagnosis and fault-tolerant strategies of UAVs to achieve PHM.19,20The fault diagnosis methods include model-based methods,data-driven methods,and fusion methods in various forms,which could deal with different types of fault scenarios like abrupt faults,gradual faults and intermittent faults.21The fault-tolerant control strategies mainly include active or passive fault-tolerant control methods to improve system performance and robustness,22,23and re-plan flight path after fault occurrence.24,25From the perspective of market products,industrial-level or consumer-level multirotor products on the market all have different levels of autonomy to enable simple fault detection and failure protection.1
In the PHM framework,apart from research focused on‘fault”,degradation(health)assessment,remaining useful life(health)prediction and other technologies use ‘health” to study the overall performance of practical systems and ensure system reliability.26,27In these techniques,a performance(health)indicator is usually first constructed,and then related algorithms are proposed to estimate the true value and variation trend of the indicator in the future time horizon.23The performance indicator is a quantitative indicator that measures the overall working status or performance of the system.The performance indicators proposed in the existing literature are mainly divided into two categories:physical performance indicators and virtual performance indicators.28The most intuitive physical performance indicator is the direct use of system process variables.For example,performance assessment research of lithium batteries will directly use the capacity and battery resistance as performance indicators.29,30However,in many cases,process variables cannot be intuitively mapped to system performance,and information extracted from process variables is required to be used as performance indicators.Data features are system work information that is extracted from raw sensor observations using specific data preprocessing algorithms.This type of information can reflect the implicit feature of system behavior.The use of data features as performance indicators often appears in the performance assessment of mechanical systems and equipment.Common time and frequency domain characteristics include peak-to-peak values,skewness,entropy,power spectral density,etc.31,32The virtual performance indicators integrate different process variables and data features,and use the lower-dimensional,monotonic mathematical indicators to reflect the performance information contained in the original data.Common virtual performance indicators include dynamic reliability,33,34Mahalanobis distance,35etc.From the perspective of performance assessment methods,existing studies are mainly divided into two categories36:model-based methods (including physics-of-failure models and dynamic mathematical models)and data-driven methods.Performance assessment methods based on physics-of-failure models use failure mechanism knowledge of system or product to describe system degradation and achieve performance assessment37;performance assessment methods based on dynamic mathematical models use filters,observers,graphic model analysis,etc.to estimate the system state or generate residuals according to known or identified dynamic mathematical models of systems,and determine the system performance status according to the state estimation result or residuals.38Data-driven performance assessment methods extract system performance patterns under normal working conditions and abnormal working conditions based on historical sensor data,and compare them with current system observations to achieve performance assessment.39Common data-driven models include artificial neural networks,40relevance vector machine,41hidden Markov model,42and Bayesian network.43Considering that both model-based and data-driven methods have their own advantages and disadvantages,some studies have also attempted to combine the two methods,using both known failure mechanism and fully exploiting observation data to improve the accuracy of performance assessment.30
Considering that such methods have been widely used in the research of operational reliability of industrial processes and complexdynamic systems,the use of ‘health” is appealing to quantitatively measure the overall performance and solve the flight reliability problems of multirotors.Refs.3,12,38,44use performance indicators such as health degree,controllability and performance reliability to assess the flight performance of multirotors,where the probability distribution of state variables of multirotors is required to accurately estimate.In these references,Extended Kalman Filter(EKF)is used to estimate the real-time probability distribution of state variables of multirotors,and the probability distribution of state variables of multirotors is approximated as Gaussian distribution.However,because of its defects in the first-order linearization of the nonlinear models,EKF can introduce large estimated errors and subsequent sub-optimal performance.Furthermore,since the dynamic model of multirotors is nonlinear,the real-time probability distribution of state variables of multirotors cannot be fully viewed as Gaussian distribution,even based on an assumption of Gaussian initial distribution.This will bring errors during the calculation of performance indicators.Particle Filter(PF)has been widely applied to nonlinear and/or non-Gaussian filtering and estimation.Since various anomalies may occur during the flight process,the multirotor system should contain both different flight modes and corresponding dynamic behavior in order to perform reliable flight performance assessment. PF approaches for such a system containing multiple modes propose augmentation of the state with the mode variable and straightforwardly estimate this augmented state.A major drawback of these approaches is that there is no control over the number of particles in a mode.In these approaches,the number of particles in a specific mode is proportional to the mode probability,so if the mode probability is very low,only a fraction of the total number of particles resides in that mode.45In order to overcome these shortcomings,this paper proposes a reliable flight performance assessment method of multirotors based on an Interacting Multiple Model Particle Filter(IMMPF)algorithm and health degree as the performance indicator.First,the multirotor is modeled by the Stochastic Hybrid System(SHS)model,and the problem of reliable flight performance assessment is formulated.In order to solve the problem,the IMMPF algorithm is presented to estimate the real-time probability distribution of hybrid state of the established SHS-based multirotormodel,where EKF is replaced by PF in the standard Interacting Multiple Model(IMM)framework.Then,the reliable flight performanceis assessed with health degree based on the estimation result.Finally,a case study of a multirotor suffering from sensor anomalies is presented to validate the effectiveness of the proposed method.
The major contribution of this paper lies in three aspects.First,a health-oriented PHM approach is introduced to provide an alternative method to deal with the reliable flight problem of multirotors,which is different from those methods based on fault diagnosis and fault-tolerant strategies.Second,a definition of health degree is used to quantitatively describe the reliable flight ability of multirotors,and viewed as an indicator to measure the reliable flight performance,which is different from methods relying on residuals and faults.Finally,the IMMPF algorithm is employed to estimate the real-time hybrid state distribution of the SHS-based multirotor model in the process of health degree calculation.The algorithm is able to improve accuracy by better handling of nonlinearity brought by the multirotor dynamics compared with the standard IMM algorithm.
The remainder of this paper is organized as follows.Section 2 provides the multirotor modeling process based on SHS and formulates the reliable flight performance assessment problem.Section 3 proposes the implementation process of the reliable flight performance assessment,including hybrid state estimation and health degree calculation.Section 4 presents the case study and Section 5 gives the conclusion.
2.Multirotor modeling and problem formulation
2.1.Multirotor dynamics
Scholars have studied the dynamics of multirotors.3,46Eq.(1)presents a general dynamic model:


where the parameterskP,kD,KPa,KDaare the controller coefficients.Eqs.(2)and(3)describe a position controller of the multirotor.In order to obtain the discrete-time dynamic model of the multirotor,Eq.(1)is discretized through the Euler method as

whereTis the discretized time.Combining Eq.(4)with an observation equation and related noise items,we have

where F(·)=x(k-1)+TG( x(k-1),u(k-1));the vector y contains system measurements,and the matrix C is the corresponding parameter matrix.Without loss of generality,we can set C=I12,which means that all process variables are directly measured.The items w and v are the process noise and measurement noise,satisfying that

where Q and R are the covariance matrices.The matrices Γwand Γvare the corresponding noise driven matrices.Note that Eq.(5)is a discrete-time stochastic continuous(variable)system.
Remark 1.The presented model by Eq.(5)only models the multirotor system when the multirotor is in a fully normal status.However,for the purpose of reliable flight performance assessment,the multirotor should contain different anomalous statuses,where transitions might occur among them.Considering that the SHS model has discrete dynamics as well as continuous dynamics,an SHS-based multirotor is presented for the purpose of reliable flight performance assessment.
2.2.SHS modeling
Assumption 1.Sensors including GPS and barometer are considered to be possibly anomalous in the SHS-based model.The other onboard components such as propulsion system,communication system and other sensors are all considered to be normal.
Assumption 2.There exists at most one anomaly occurring in either GPS or barometer at the same time,which means that it is impossible that two sensors are simultaneously anomalous.
Remark 2.Assumption 1 confines the discrete dimension of the SHS-based model,which leads to convenient understanding of the SHS-based model structure and the subsequent reliable flight performance assessment algorithm.Assumption 2 also confines the discrete dimension.This is reasonable,since there is little chance that two sensors are both anomalous at the same time for a qualified multirotor product.Actually,the above assumptions can be relaxed by introducing more discrete modes of SHS.
According to the above assumptions,three discrete modes are considered in the SHS-based multirotor model as

whereq1is a fully normal mode,q2is a GPS anomaly mode andq3is a barometer anomaly mode.For∀qj∈ Q,the continuous dynamics is
The symbolf(·)is the probability density function(pdf).As to the observation equation,for modeq1representing the fully normal status,we have

which is interpreted as follows:C2is the rest part of subtraction of the rows c1and c2from C1.The meaning of C2is that when a GPS anomaly occurs,the continuous dynamics under modeq2does not consider GPS measurements,despite whether the GPS can generate measurements or not.According to this principle,for modeq3,we have

because the heightpzis the 3rd component of x.The observation noise v and the corresponding noise driven matrix Γvunder modesq2andq3can also be obtained following the similar variation of the matrix Cj.

The failure rate of on board components in a multirotor and the related reliability test data are helpful for determining the value of the transition probability πij.
For clarity,the SHS-based multirotor model is written as a tuple H=(Q,F,u,Γw,Q,Γv,R,Π,p,Init),where Init is the initial probability distribution of the hybrid state of the SHS model.The structure of the established SHS-based multirotor model is depicted in Fig.1.Note that the proposed model can be extended for considering more kinds of anomalous situations.For example,other sensors such as gyroscope anomaly can also be modeled as a new mode following the principles above.For propulsion system anomaly,especially for actuator anomaly,the form of the nonlinear function F(·)can be modified by adding a control effectiveness matrix.

Fig.1 Structure of SHS-based multirotor model.
2.3.Problem formulation
Similar as safety assessment studies,47reliable flight performance refers to the ability of a multirotor to maintain a good working condition and perform tasks as required by users.In order to quantitatively assess this ability,a definition of the health degree is used to assess the reliable flight performance for multirotors.3A dynamical system is considered reliable if suitable for its intended purpose for an extended period of time and considered unreliable if damaged or approaching a status of failure for its intended purpose.For a multirotor,it is always expected to execute a task from the assignment of users.Since a multirotor performs a task by flying along with a task trajectory,the flight of a multirotor is considered reliable if it flies following the trajectory without deviation.Thus,the health degree is defined as a probability that the multirotor follows the task trajectory.
Fork=0,1,2,···,it is supposed that a multirotor has a predefined mission trajectory denoted by a sequence of waypoints:
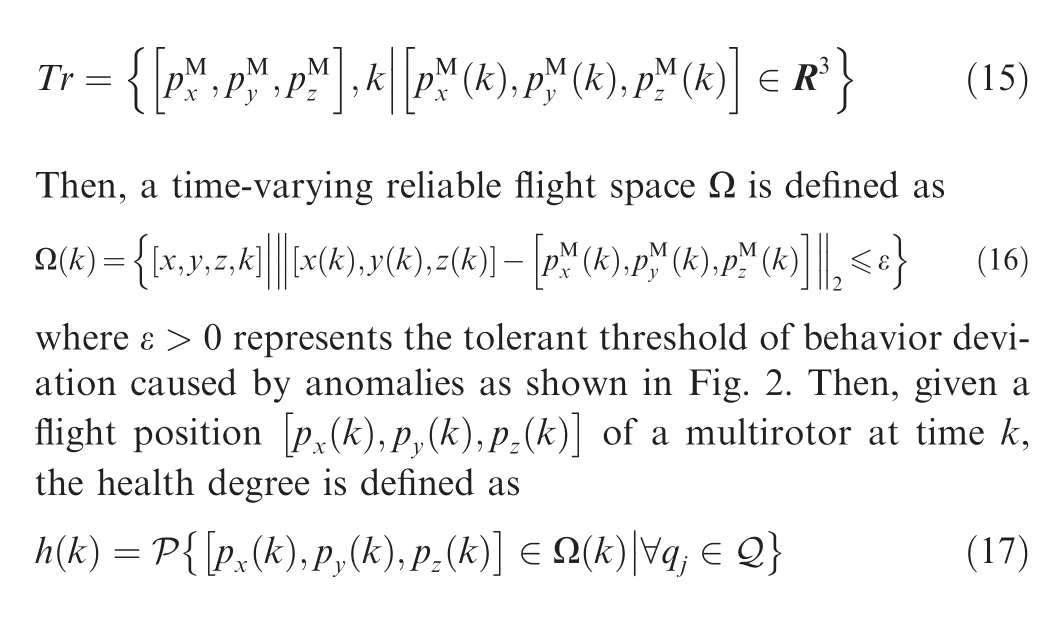

Fig.2 Schematic diagram of task trajectory Trand tolerant threshold ε.
Remark 3.As shown in Fig.2,the envelope generated by the task trajectoryTrand the tolerant threshold ε is viewed as a‘health” set,which is similar as the safe set definition in the safety assessment research.For an assigned task,its trajectory is predefined,and the health degree of a time indexkis the probability that the multirotor remains within the ‘health” set at timek,no matter which discrete modes it belongs to.Thus,the problem of reliable flight performance studied in this paper is to estimate the real-time health degree of the multirotor when it is performing a task.
3.Implementation of reliable flight performance assessment

3.1.Hybrid state estimation
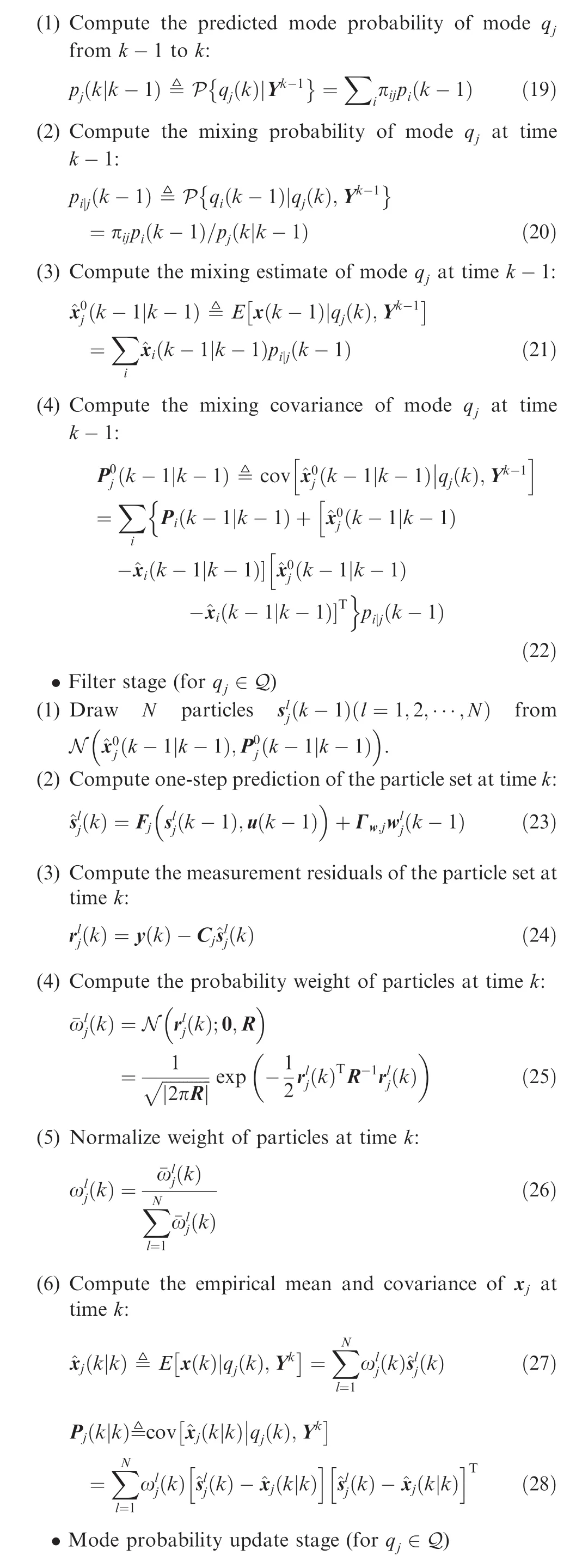
In this part,an IMMPF algorithm is presented to estimate the hybrid state of the SHS model.45Considering the advantage of PF in representing non-Gaussian distribution,the IMMPF algorithm is proposed by combining the IMM framework with the standard PF approach.There are four steps in IMMPF:(A)interaction stage,where the input to the filter of each mode is obtained by mixing the estimates of all filters at the previous time under the assumption that the system is in this particular mode at the present time;(B) filter stage,performed in parallel for each mode;(C)mode probability update stage,based on the model-conditional likelihood functions;(D)estimate fusion stage,which yields the overall state estimate as the weighted sum of the updated state estimates of all filters.
Given an SHS-based multirotor model H and an initial condition as shown in Eq.(18),the IMMPF algorithm is presented as follows:
· For k=0,1,···
·Interaction stage(for qj∈Q)
(1)Compute the residual covariance of the particle set at time k:

(2)Compute the likelihood function of the particle set at time k:

(3)Update the mode probability at time k:

(4)Recognize the current mode at time k:

·Estimate fusion stage(for output purpose)
(1)Compute the overall estimate of x at time k:

(2)Compute the overall covariance matrix at time k:

There are two points required to be noted.First,the particles are re-sampled in the filter stage,and the particle number is fixed in each mode and is independent of the mode probability.This is an improvement over the traditional IMMPF algorithm where the number of particles in every mode is proportional to the mode probability.When the mode probability of a specific mode is too low,the assigned particles become less,which will influence the precision of the continuous variable estimation of this mode and therefore bring errors to the process of health degree calculation.Second,Eqs.(27)and(28)are empirical mean and covariance of x under modeqj,which are used for estimate interaction and mode probability in the iteration process.The real probability distribution of x under modeqjis represented by the particles and corresponding weights as shown in Eqs.(23)and(26).By combining with Eq.(31),the probability distribution of the hybrid state (q,x)at timekis

where δ(·)is Dirac function.
3.2.Health degree calculation
On the basis of the hybrid state estimation,the real-time health degree of the multirotor can be calculated.According to Eqs.(17)and(35),the health degree of the multirotor is

4.Case study
In this section,the proposed reliable flight performance assessment method is performed on a multirotor with sensor anomalies.The sensors GPS and barometer are considered alternately anomalous in the simulation.The SHS-based model configuration,simulated flight data generation and simulation results are presented.
4.1.Model configuration
The parameters of the multirotor model presented in Section 2 are listed in Table 1.Here,note that the inertial matrix of the multirotor can be measured by a suspension line method,and the controller parameters can be obtained by the trial method based on simulations.48
For the process noise w and the noise driven matrix Γw,we set

For measurement noise vjand the noise driven matrix Γv,junder each modeqj,we set

Table 1 Multirotor model parameters.

For modesq2andq3,the matrices Rjand Γv,jcan be obtained following the principles presented in Section 2.2.The transition probability matrix in the discrete dynamics is set as
4.2.Simulated flight data generation
The whole simulation time is 160s.In the simulation,the assigned mission trajectory is presented in Table 2.For example,the multirotor is required to hover at the way point(0,0,10)during [ 0,6]s,and then the multirotor should fly to the next way point( 5,5,10)and hover there.In the entire mission process,different anomalies occur alternately as shown in Table 3.Here,Eq.(5)is used to generate real flight data under normal condition and different anomalies,including true values of process variables of the multirotor and their measurements.For simulating GPS measurement with big noise,the related parameters of covariance matrix R1of v1(·)are temporally increased as

For GPS measurement drift,a random value is added to the measurementspxandpyas shown below:

For loss of GPS measurements,the related measurement items are changed to


Table 2 Mission trajectory.

Table 3 Anomaly occurrence scenario.
For barometer anomaly,similar variation is performed to generate related measurements.
4.3.Results and analysis
The proposed reliable flight performance assessment method is performed in the presented simulation scenario.The results are shown in Figs.3-7.According to Eq.(17),the componentsn x are most concerned in the reliable flight performance assessment of multirotors.Fig.3 shows the variation of measurements and the estimated values ofFig.4 depicts true values and estimated values ofIt can be concluded that:(1)despite incorrect system measurements or even loss of measurements,the process variables x can also be estimated.(2)When sensor anomaly(especially loss of measurements)occurs,the estimated values will deviate from the true values of related components in x.
Here,it should be noted that the estimated values ofdepicted in Figs.3 and 4 are estimates with minimum variance for output purpose.For reliable flight performance assessment,the probability distribution of the hybrid state (q,x)is also obtained by the IMMPF algorithm.Fig.5 depicts the probabilities of different modespj(k)in Eq.(35),and Fig.6 presents the mode recognition results based on that.It can be seen that the real-time dominant mode of the multirotor can be correctly recognized by the IMMPF algorithm most of the time.Also,theof each mode is denoted by a number of particles in Eq.(35).Then,the health degree can be calculated according to Eq.(36).Here,the tolerant threshold ε in Eq.(16)is set to 0.5m.The result is shown in Fig.7.From Fig.7,it can be seen that the health degree will decrease when sensor anomalies occur,which proves that the variation of health degree is able to reflect system anomalies and reliable flight performance degradation.Here,note that hardware failures of sensors cannot recover without maintenance in practice,while a few anomalies of sensor measurements may recover in some situations.For example,loss or drift of GPS signal might occur when the multirotor flies under a high-altitude shelter.After the multirotor flies out of the shelter zone,the GPS signal will recover.In the presented simulation,sensor measurements are set to be normal and anomalous alternatively.Thus,the curve of the health degree is not monotonic with time.In addition,external disturbances will also lead to local fluctuations of the health degree in a small range.

Fig.3 Measurements and estimates of

Fig.4 True values and estimates

Fig.5 Mode probability of SHS-based multirotor model.

Fig.6 Mode recognition result of SHS-based multirotor model.
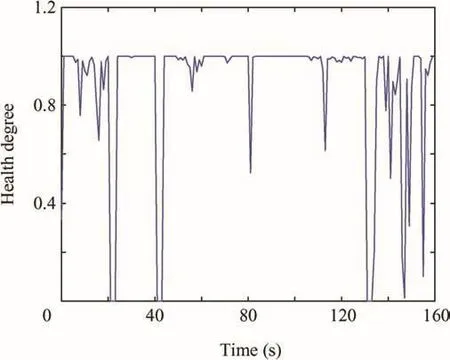
Fig.7 Health degree variation obtained by IMMPF algorithm.

Fig.8 Health degree variation obtained by standard IMM algorithm.
For comparison,the health degree calculated by the standard IMM algorithm with EKF is depicted in Fig.8.It can be seen that there is a big difference between the two curves.That is because the standard IMM algorithm with EKF introduces large estimated errors and subsequent sub-optimal performance by using the first-order linearization of the nonlinear models.Furthermore,since the dynamic model of multirotors is nonlinear,the real-time probability distribution of state variables of multirotors cannot be fully viewed as Gaussian distribution.This will bring errors during the calculation of the health degree.Thus,the health degree calculated by the IMMPF algorithm has a better accuracy,which better meets the requirements of reliable flight performance assessment.Here,note that the result of reliable flight performance assessment is sensitive to external disturbances.Thus,a reliable flight performance assessment of a homogeneous multirotor team should be established.This manner can effectively evaluate the amplitude and form of the external disturbance,and eliminate its influence on the assessment results.
5.Conclusions
(1)This paper proposes a reliable flight performance assessment method of multirotors based on an IMMPF algorithm.A case study of a multirotor suffering from sensor anomalies is presented to validate the effectiveness of the proposed method.It proves that the variation of health degree is able to reflect system anomalies and reliable flight performance degradation.
(2)Compared to the standard IMM algorithm,the health degree calculated by the IMMPF algorithm has a better accuracy,which better meets the requirements of reliable flight performance assessment.
(3)In future research,the proposed method should be further studied by taking wind turbulence and other form of wind into consideration,since these disturbances cannot be viewed as Gaussian distribution.Furthermore,other anomalies such as propulsion system anomaly and communication breakdown can be added into the SHS-based multirotor model to extend the applicability of the proposed method.
Acknowledgements
This work was co-supported by the Beijing Natural Science Foundation of China(No.4194074),the National Key R&D Program of China(No.2017YFC1600605),the Shandong Provincial Natural Science Foundation of China (No.ZR2018BF016),and the Beijing Municipal Education Commission Research Program-General Project of China(No.KM201910011011).
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- Guide for Authors
- Special Issue call for papers: Emerging Technologies of Unmanned Aerial Vehicles
- Identification of the state-space model and payload mass parameter of a flexible space manipulator using a recursive subspace tracking method
- Effects of splined shaft bending rigidity on cylinder tilt behaviour for high-speed electrohydrostatic actuator pumps
- Efficiency optimized fuel supply strategy of aircraft engine based on air-fuel ratio control
- Event-triggered adaptive control for attitude tracking of spacecraft