Conceptual design and optimization of a tilt-rotor micro air vehicle
2019-02-27HASSANALIANSALAZARABDELKEFI
M.HASSANALIAN,R.SALAZAR,A.ABDELKEFI
aDepartment of Mechanical and Aerospace Engineering,New Mexico State University,Las Cruces,NM 88003,USA
bDepartment of Mechanical Engineering,New Mexico Institute of Mining and Technology,Socorro,NM 87801,USA
Abstract The conceptual design and optimization of a tilt-rotor Micro Air Vehicle(MAV)for a well-defined mission are performed.The objective of this design cycle is to decrease the design time in order to efficiently create a functional tilt-rotor drone.A flight mission is firstly defined for a tiltrotor MAV performing hovering and cruise flight scenarios.Secondly,a complex wing shape is chosen and modeled in order to determine the final shape.The initial shape is scaled in order to acquire an arbitrary wingspan of one meter.For the specific area and wingspan,the aspect ratio of the designed wing shape is found to be equal to 2.32.Thirdly,a constraint analysis of the MAV is performed by using an energy balance analysis for six different flight scenarios.This analysis yields the required power loading and wing loading.Fourthly,the weight of the vehicle is estimated using both statistical and computational methods.After estimating the total weight and the wing loading of the MAV,the surface of the wing is determined,yielding a final wingspan of 0.76 m.Subsequently,considering the total weight of the designed MAV,the needed lift coefficient is determined.Fifthly,using the lift coefficient in conjunction with XLFR5,a batch of airfoils is selected and analyzed to evaluate the aerodynamic coefficients of the wing with each airfoil.This analysis ultimately leads to the optimum airfoil being selected.Finally,design of the fuselage and tail,internal components selection,and servo-mechanisms design are carried out prior to a stability analysis.All these proposed steps are needed to design efficient and functional tilt-rotor MAVs.
KEYWORDS Aerodynamic analysis;Sizing;Tilt-rotor MAV;VTOL;Stability
1.Introduction
The popularity of multifunctional drones capable of complex flying missions has increased due to the diverse flying scenarios these Unmanned Air Vehicles(UAVs)can perform.1-3The use of Micro Air Vehicles(MAVs)has risen because of their ability for data collection from stabilizing optics and sensors like those proposed by Kjenstad.4As the popularity of these drones increases,so does the desire to optimize the performance of these flying drones.1Efforts by researchers like VanderMey5have been made to increase the endurances of these drones which expand their capabilities.Drone design is initially based on flight missions and objectives.A drone must functionally and efficiently be able to navigate in diverse situations.3,6It has been demonstrated that tilt drones have the capabilities of Vertical TakeOff and Landing(VTOL),hovering,high-altitude flight,and increased endurance,1,3,4which allow them to be exploited in a wide range of missions with various objectives.1,3
The different classifications of tilt drones are,namely,rotor,wing,body,and ducted fan.3Transitional designs have been implemented into larger UAVs like Bell Eagle Eye,Boeing Heliwing,and Conadair CL-227.7Investigators like Carlson8have implemented a flying wing into a tricopter tiltrotor design.The most important differences between tiltrotor and tilt-wing drones during VTOL are the drag forces during transition and energy consumption of the motors.9-13The wings for a tilt-rotor aircraft are fixed at a neutral position for the optimum forward flight efficiency.8,12Therefore,during a takeoff or vertical hovering elevation change,the wings become a body with a larger coefficient of drag.The disadvantage of this design is that to gain altitude during hovering and takeoff,more energy must be expended.8The tilt-wing design's disadvantage is that the endurance is decreased relative to the tilt-rotor design due to more energy expended for extra motors for all flight modes.5,10,11The advantage of both designs is that they maintain stability of flight during transition from hovering to forward flights.10-13The tilt-body UAV firstly proposed by Ro et al.14is a complex planform in which the body operates independently from the wings of the aircraft.Ducted fans which are capable of creating sufficient downward thrust have been implemented into fighter jet aircraft,such as Lockheed Martin F-35B.15Smaller versions of ducted fans have been simplified into a drone version capable of VTOL like those created by P flimlin et al.16However,the range of these types of drones is lower than that of a fixed wing design.
A tilt-rotor/ flying-wing UAV is chosen for its VTOL/hovering capabilities,high-altitude cruising speed,and cargo transportation capabilities.2,4,8Stability is highly desired for a drone to be easily controllable during hovering,normal flight,and transition.The coefficient of drag needs to be minimized for the wing in order to maximize endurance.During high altitude cruising,the design must be optimized for the fastest flight speed and lowest amount of drag.The goal of this design is to maximize the flight time by minimizing losses and making the design as efficient as possible.The design of an unconventional wing shape,a chosen airfoil,and motor mounting points are going to be the main contributions of this work.In this effort,the overall efficiency of the drone will be increased.This work's contribution includes the cycle used for the whole design process which includes flight mission,wing design,wing loading analysis,weight estimation,aerodynamic analysis,body and tail design,actuation mechanism design,stability analysis,etc.The rest of this paper is organized as follows.In Section 2,conceptual design steps and weight estimation methodologies are proposed.A tilt-rotor MAV is designed using different statistical and computational analyses.Finally,a summary and conclusions are shown in Section 3.
2.Design process of a tilt-rotor MAV
The conceptual design of a tilt-rotor MAV is carried out in this study.The complete cycle that contains all steps to design an optimized tilt-rotor MAV is presented in Fig.1.
As shown in Fig.1,the sizing process of a tilt-rotor MAV involves(A)specification of the mission and aviation plan,(B)determination of the planform and aspect ratio,(C)constraint analysis,and(D)weight estimation.Accomplishing all these phases leads to the determination of the wing dimensions and airfoil shape.After that,the fuselage and propulsion systems are designed and selected.The determination of the tail properties and Center of Gravity(CG)of the MAV can be done after calculating the position of the Aerodynamic Center(AC)and simulating the equilibrium and stability equations for vertical(V)and horizontal(H)modes.After specifying the electrical components of the tilt-rotor MAV,the location of the aft motor is determined.Finally,after optimizing the efficiency of the designed MAV,the navigation and control system is selected,and then the fabrication process takes place.It should be mentioned that Hassanalian et al.17-20recently designed and fabricated fixed-and flapping-wing MAVs by considering similar conceptual designs.
2.1.Specification of mission
The determination of the flight mission is carried out by creating a simulated 2D flight path showing the flight distance,turning radii,objective distances,and rotor transition distance.Using a constraining time of 30 min and assumed flight speeds, flight objective times are determined.The MAV's capability for VTOL allows for the mission to be carried out without the need for a runway.A take-off can occur in a small area,which gives this drone a greater facility for deployment.
The transition of the rotors allows the MAV to have hovering capabilities as well.The fixed wing design gives the drone a higher cruising altitude at a higher speed than that of a conventional copter aircraft.The flight plan includes cruise and loitering objectives before multiple hovering objectives in order to show the diverse flight capabilities of this MAV.The flight path is estimated to be 15500 m,and the flight time to be 30 min.The flight of this drone is planned to be performed on the New Mexico State University campus.This urban environment would display a typical scenario in which the tiltrotor MAV could perform.In Fig.2,a schematic view of the defined mission is shown.
The required parameters for the designed tilt-rotor drone are the following:(A)the MAV should be able to take off and land vertically;(B)the weight should not exceed 1 kg;(C)the MAV should carry payloads with a 40-g weight including a camera and sensors;(D)the stall speed should not be more than 7 m/s;(E)the cruise speed which is equal to 20 m/s is required at a 200-m altitude;(F)the maximum speed should be equal to 25 m/s;(G)the loitering speed at a 200-m altitude should be equal to 20 m/s;(H)the range of the MAV should be 5 km;(I)the ceiling should be between 50 and 250 m from ground;(J)the vertical climbing rate from a runway should not be less than 1 m/s;(K)the required endurance is 30 min;(L)the cruise flight should be done in 20 min;(M)the drone should be able to do the hovering flight for 8 min on top of targets;(N)the maximum time for climbing to the ceiling and the landing time should be equal to 1 min.

Fig.1 Method used for designing a tilt-rotor MAV.
2.2.Selection of wing planform
The shape selection for the tilt-rotor MAV is performed by searching through conceptual aircraft designs.A shape is selected with inspiration from a bat wing shape based on the need for rotor mounting points and the originality of the modified design.This bat-inspired wing shape provides a good configuration for the positioning of the front propulsion systems including the motor,propeller,and rotational actuation mechanism,and it will also be appropriate for the propulsion systems during hovering,when the propellers are in the vertical mode.In other words,the modified bat-inspired wing shape does not block the stream of the rotors in front of the wing during hovering.The complex planform of the MAV requires multiple conceptual models to be created in order to obtain a visual representation of what the final product could look like.NX-10 is used in order to create an initial shape,to scale the wing shape,and to model a final visual that could be utilized for the design process.NX-10 is a CAD modeling program created by Siemens.Using NX-10,the wing shape area is determined,and in conjunction with the wingspan yields an aspect ratio of 2.32.In Fig.3,schematic views of a bat's wing shape and the modeled planform are presented.

Fig.2 Defined mission for tilt-rotor MAV.

Fig.3 Views of bat,bat wing shape,and inspired wing shape.
2.3.Optimum values for wing loading and power loading for horizontal flight
To determine the optimum wing and power loading values for the tilt-rotor MAV,six distinct flight tests for different scenarios including stall speed,constant cruise speed,constant height and loiter/turn,maximum speed and ceiling,and constant velocity climb are considered.For each flight scenario,the relationship between the power loading(P/W)and the wing loading(W/S)is determined,wherePis the power,andWandSrepresent,respectively,the weight and surface of the tilt-rotor MAV.
The general relation between the power loading and the wing loading is given by17,19

where β is the ratio accounting for the weight loss from fuel expended during flight which is equal to one since a battery is being utilized,α*represents the ratio of power difference between the intended flight elevation and the sea level,K1is equal to 1/(πe·AR),in whichedenotes the Oswald number,AR is the wing aspect ratio,qis the dynamic pressure which is defined by 0.5ρV2,ρ denotes the air density,Vis the flight speed,gis the gravity acceleration,CD0represents the zero drag coefficient,his the flight height,dh/dtdenotes the climb speed,dV/dtis the acceleration,ηpis the propulsion efficiency,andnis the load factor.
The constant α*which is defined as a function of the altitude from the sea level(h)and the temperature(Ta)can be determined from the following equation18,21:

The gravity acceleration(g)can be changed due to the altitude(h0)and the global latitude position of the flight(L0).The gravity relationship is defined by a polynomial expression combined with the Helmert relationship.22Regarding the altitude value and considering von Mises's relations for atmospheric parameters,23the air pressure(p),density(ρ),and dynamic viscosity(μ)for Las Cruces,New Mexico,with an average temperature equal to 25.39°C(US climate data)and an altitude of 1189 m from the sea level,are considered equal to 980 kPa, 1.177 kg/m3, and 1.846× 10-5kg/(m·s),respectively.
According to the flight conditions,CLmax=1.2,g=9.8 m/s2,ηp=0.85,K1=0.1715,CD0=0.05,andVstall=7 m/s.whereCLmaxrepresents the maximum lift coefficient,The reduced general power loading equation versus the wing loading can be written as follows:

In Table 1,for the constant-velocity climb,dh/dtcan be calculated as follows:

Finally,the maximum wing loading is obtained equal to 3.46 kg/m2.The appropriate value for the power loading is equal to 30.11 W/kg,which is the minimum value that can satisfy different flight modes in horizontal flight for the tilt-rotor MAV.
2.4.Estimation of weight of tilt-rotor MAV
When estimating the weight of this drone,statistical and computational approaches are simultaneously utilized.In this study,the electrical components are estimated by accounting for the intended equipment which will be used.This statistical analysis utilizes knowledge of previous systems in order to gain a firmer understanding of the equipment that can be used in the design.In Table 2,the assumed equipment used in the estimation is listed as follows:electrical motor,speed controller,servo motor,battery,etc.A tilt-rotor drone will use multiple servo motors,electrical motors,and propellers in order to complete its mission.According to Table 2,the summation of the electrical equipment weight is estimated to be equal to 480 g.
By using a computational method proposed by Hassanalian and Abdelkefi,24the weights of the wing,fuselage,and tail can be expressed as functions of the wing surface.These structural components can be estimated using common materials.In the construction of the various components,P20 foam will be used on the interior of the wing,along with a balsa wood sheathing over this foam.The fuselage and tail are assumed to be constructed using balsa wood for rigidity.The density of the foam is 20 kg/m3,and the density of the balsa wood is assumed to be 125 kg/m3.According to the defined planform,the weight of the wing(Wwing)as a function of the wing surface(Swing)can be written as

where ρfoamdenotes the foam density,tMACrepresents the thickness of the wing in the Mean Aerodynamic Chord(MAC),and ρbalsaandtbalsaare the balsa wood density and thickness,respectively.Considering the method proposed by Hassanalian and Abdelkefi,24the mean thickness of the wing(tMAC)at the location of the MAC is determined as

Table 1 Expressions of P/W versus W/S for different flight modes.

Table 2 Weights of the electrical components.

where MAC can be extracted from the generated shape of the wing with an aspect ratio of 2.32.After substitution,one obtains

Considering the same process,the weight of the vertical tail can be expressed as24

where ρvtdenotes the density of the used materials,tvtis the thickness,Svtrepresents the surface of the vertical tail,Vvtrepresents the vertical tail volume coefficient,andlvtis the tail arm which is the distance between the point that is 0.1MAC and the wing AC.17,19According to the wing shape,the tail arm can be written as follows:

wherecris the root chord length.Considering the properties of the balsa wood as the used material,the weight of the vertical tail can be expressed as

The weight of the fuselage is strongly dependent on its shape.For the design of this tilt-rotor MAV,a hollow cube shape for the fuselage is used with considering that the length of the fuselage(lf)is equal to the root chord(lf=cr).In addition,the width and height of the fuselage are considered equal to 15%of the wingspan(hf=wf=0.15b).Consideringtfas the thickness of the hollow cube,the weight of the fuselage can be determined by24

After substitution,the fuselage weight can be expressed as

It should be mentioned that the vertical tail and fuselage will be fabricated using the balsa wood with thicknesses of 5 mm and 7 mm,respectively.Considering 15%as the unpredictable weights of structural parts obtains

The total structural weight can be expressed as follows:

Setting Eq.(14)equal to the previously determined wing loading gives an equation in terms of the surface of the wing as

Consequently,one finds

When Eq.(16)is solved,the resulting final surface of the wing allows for the calculations of the weights of the vertical tail,fuselage,and wing to be equal to 30,140,and 165 g,respectively.The total weight of the drone is then estimated to be equal to 850 g.
2.5.Determination of geometrical and aerodynamic characteristics of wing
In order to determine the final dimensions of the wing,the estimated weight(W=0.85 kg)is used in conjunction with the wing loading(W/S=3.46 kg/m2),which yields the wing surface(S=0.25 m2).When using the determined wing aspect ratio(AR=2.32),with this determined wing surface,the final wingspan is obtained asb=0.76 m.When the shape is generated in XLFR5,the root chord is extracted ascr=0.394 m.Using the determined weight which is equal to the lift(W=L),wing surface(S),speed(V),and density(ρ)yields the coefficient of lift(CL)by usingL=0.5ρV2SCL.In this study,the lift coefficient is determined asCL≈0.14.
Select the optimal airfoil based on the following specific criteria:(A)it must generate the required lift with minimized drag;(B)it has a maximum lift coefficient in order to maximize the stall angle;and(C)the thickness of the airfoil must be as thin as possible to negate the possibility of a boundary layer separation.Utilizing the generated model in XLFR5,compare a selection of airfoils based on their angles of attack for a flow speed ofV=20 m/s and a Reynolds number ofRe≈500000,and utilize a 3D-panel analysis.The 3D-panel analysis in XLFR5 is the most accurate due to the inclusion of downstream effects of the fluid flow over the wing.25,26Therefore,the 3D-Panel analysis yields the most accurate predicted results for the tested airfoils.The results for the airfoils from the XLFR5 analysis are represented in Table 3.The following criteria are examined:the angle of attack α,lift coefficientCL,drag coefficientCD,lift to drag ratioCL/CD,maximum lift coefficientCLmax,stall angle of attack αstall(in a two-dimensional analysis),pitch moment coefficientCm,and thickness of the airfoiltmax.
According to the criteria needed on selecting the best airfoil,a scoring system is devised to compare the airfoils based on their performances.The best performing airfoil receives a maximum score of five,the second best receives four,and so on,till the poorest performing receives only one point.Summing the score gives a good parameter based on which an airfoil can be selected.The angle of attack is considered almost equal to 5°in the given results in Table 4.For this considered value of the angle of attack,the generated lift is sufficient enough to fulfill the lift coefficient criterion found from the weight estimation.
Using XFLR5 software,the distributions of the pressure coefficient(Cp),lift coefficient,and viscous and induced drag coefficients for E221,EH2510,MH20,S3,S5020,S5010,and S3014 are shown in Figs.4 and 5,respectively.Analyzing the different airfoils in XLFR5 allows the visualization of the lift, drag,and pressure distributions for the identified airfoils.Note that for each airfoil,the pressure distribution changes,the lift distribution shifts,and the drag is altered for the different airfoils.Visual observations are used when analyzing the comparison of the airfoils.

Table 3 Comparison between possible reflex airfoils when AR=2.32 and V=20 m/s.

Table 4 Rating airfoils based on the airfoil selection criteria.
Utilizing the determined criteria from Tables 3 and 4,graphs can be produced to display the performance of each airfoil by plottingCLandCDas a function of the angle of attack(α)andCL/CD.As shown in Figs.6 and 7,S3104 airfoil displays a better performance,especially in theCL-α comparison.Although this airfoil does not have the most minimal drag in comparison with those of other airfoils,its overall performance inCL/CDis acceptable.As it can be noted from Fig.6(b),for a certain value of the angle of attack,a sudden increase in the drag coefficient is observed.This result may be due to a boundary layer separation.
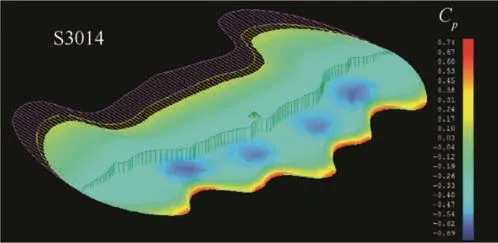
Fig.5 Variations of pressure,lift,and drag distributions on designed tilt-rotor MAV wings with S3014 airfoil.

Fig.6 Variations of lift and drag coefficients as a function of angle of attack for various airfoils.
Based on the obtained results from Table 4 and Figs.6 and 7,S3014 is selected as the airfoil of our design.A schematic view of the airfoil is shown in Fig.8.
2.6.Design of fuselage,control surfaces,and vertical tail
After designing the wing,the next step is the fuselage design.There is an interest of creating a simple fuselage design with the importance of carriage of sensors,a battery,transmitters,and an aft motor in one compartment.The size and number of components are based on the weight estimation.To house these components in the simplest design that can be easily fabricated,a modified box design will be implemented.The design will slide over the wing,be attached at a neutral angle,and consider the wing dimensions in order to maintain stability.Schematic views of the designed fuselage are shown in Fig.9.
Applying A.C Calculator software,the position of the AC from the wing's leading edge is determined to be equal to 170 mm.In addition,using a Raymer statistical diagram27to estimate the placement and dimensions of the control surfaces of the designed tilt-rotor MAV,we present the top view of the wing including the dimensions and locations of the control surfaces in Fig.10.
The next step in the design is tails' design.Due to the use of a reflexed airfoil and a reduction of the size of the drone,we do not need to design a horizontal tail.Therefore,we should just design a vertical tail.As for the vertical tail,the main parameter to design it is its surface(Svt).The tail arm(lvt)in flying-wing drones is considered equal to the distance from the end of the wing at the point that is 0.1 MAC to the wing aerodynamic chord.19The vertical volume coefficient(Vvt)is considered as 0.03 in this design process.28Considering these values,the surface of the vertical tail can be calculated.In this design process,instead of using one vertical tail in the center line of the tilt-rotor MAV,we design two tails in tips of the wing with half surface.Generally,the tail aspect ratio is between 1.2 and 1.8,and the taper ratio is between 0.4 and 0.6.17In this sizing process,the tail aspect ratio and taper ratio are considered to be equal to 1.5 and 0.5,respectively.Finally,the dimensions of the vertical tails and their positions on the wing are determined,as shown,respectively,in Fig.11(a)and(b).As for the airfoil type in these tails,a symmetrical airfoil NACA0006 is used.

Fig.7 Variation of lift coefficient as a function of drag coefficient for seven considered airfoils.

Fig.8 Schematic view of S3014 airfoil.
2.7.Design of propulsion system
After designing the wing,fuselage,tails,and control surfaces,the primary design of the propulsion systems is performed.According to the selected configuration for the tilt-rotor MAV which have two propulsion systems at the leading edge of the wing and one at the back of the fuselage,the ratios of distributed thrust in hovering flight for forward and back rotors are considered 75%and 25%,respectively.The generated forces by the motors should be able to cancel the weight and also drag forces during hovering flight.The drag forces are calculated as follows:

where the drag coefficient of 1.28 is calculated through the 3D-panel method in XFLR5 for the tilt-rotor MAV in the vertical mode.
Considering the total weight(850 g)in hovering flight for the MAV with a 1-m/s vertical speed and 10%controllability,the required total thrust in the hovering mode is calculated as follows:

whereTToandDVare the total required thrust and drag forces in the hovering mode.
The generated thrust forces for each one of the forward motors and the aft motor are equal to 37.5%and 25%of the total thrust,respectively,in the hovering flight mode.Therefore,the required thrusts for forward and aft motors are calculated as 3.53 N(≈360 g)and 2.35 N(≈240 g),respectively.The required thrust in forward flight with a speed of 20 m/s can be calculated with considering the generated drag force as follows:

The required thrust that should be provided by the forward motors with 15%controllability is equal to

Next,considering the maximum required thrusts for the hovering and horizontal modes,AXI 2208/26 GOLD LINE and AXI 2208/20 GOLD LINE are selected as forward and aft motors,respectively.
2.8.Rotation actuation mechanism design
For the tilt-rotor MAV,an actuation mechanism is needed for a simple light mechanical design to achieve a repeatable transition.For designing the rotation system,different factors should be considered,such as the type and configuration of the drone,the type and positions of the motors,etc.According to the considered positions for forward motors in the wing shape,a rotation system consisting of a four-bar actuation mechanism,a servo-motor as an actuator,and a container is designed for each side of the wing.The designed actuation mechanism should be able to rotate the propulsive system 90°.The dimensions of the four-bar actuation mechanism and schematic views of the designed rotation system are shown in Figs.12(a)and(b),respectively.It should be noted that according to the required torque for rotation of the designed system,a Futaba servo motor(FUTM0657-S3157 High-Torque/High-Speed Micro)is selected as an actuator.It should also be mentioned that a container should be designed to keep the rotational systems on the leading edge of the wing.
2.9.Tilt-rotor stability and equilibrium in different flight modes and location of gravity center

Fig.9 Side,top,and schematic views of designed fuselage.
In this section,the equilibrium and stability of the designed tilt-rotor MAV in horizontal and vertical flight modes around pitch,roll,and yaw axes are investigated.Due to having a flying wing(lack of a horizontal tail),in the horizontal flight mode,for having equilibrium in the pitch axis,the generated lift by the wing and body or the whole drone should be equal to the weight,and the sum of generated momentum around the CG should be equal to zero.In other words,for longitudinal equilibrium,the momentum of weight around the aerodynamic center should be canceled by the momentum which is created by the wing.It should be noted that adding the fuselage,tails,and the rotation mechanism on the wing changes the distributed lift on the wing and reduces the generated lift by around 5%.Thus,the new generated lift is almost equal to 7.9 N.Increasing the angle of attack of the wing can compensate for the required lift,but increases the drag forces.Hence,according to the required lift and the type of the selected airfoil,the angle of attack of the wing is calculated to be equal to 1°.
To determine the position of the CG,we consider the definition of the static margin(kn=h0-h*)whereh*is the ratio of the distance between the CG and the leading edge of the wing in the root chord to MAC,andh0denotes the ratio of the distance between the AC and the leading edge of the wing in the root chord to MAC.It has been reported that the static margin for drones is usually between 0.05 and 0.4.29,30Varying the static margin between 0.05 and 0.4,a distance between 15.3 to 3.6 cm from the leading edge in the root chord is determined for the location of the CG.Considering the static margin equal to 0.2 as a primary guessed value,it results in a CG position at 10 cm of the leading edge.It should be noted that the exact position of the CG can be determined after performing a stability analysis in the vertical mode and also different flight tests.The two conditions of the longitudinal static stability of the tilt-rotor MAV in the horizontal flight mode are investigated using XFLR5 software.These two conditions are as follows30:

Fig.10 Dimensions and locations of control surfaces of designed tilt-rotor MAV.

whereCmis the pitching moment coefficient.In Fig.13,the variation of the pitching moment coefficient as a function of the lift coefficient is plotted for the designed MAV.It can be seen from this plot thatCm0is almost equal to zero,and the slope of this curve is always negative.Thus,the tilt-rotor MAV is stable around the pitch axis.
Due to the symmetrical shape of the tilt-rotor MAV,this drone will also be stable around the yaw and roll axes.Next,we investigate the stability of the tilt-rotor MAV in the vertical mode which results in determining the location of the aft motor.The equilibrium and stability should also be satisfied in the hovering mode of the MAV.In hovering flight,the drone will act as a tri-copter drone.In Fig.14,a schematic view of the drone in the hovering mode is shown.
For having the equilibrium in the pitch axis,we have

As discussed in Section 2.7,the generated thrust forces by the forward and aft motors,which act as the source of the lift forces in this flight mode,should be able to overcome the total weight(850 g)in vertical flight for the drone with a 1-m/s vertical speed and 10%controllability.According to Section 2.7,L1=3.53 N andL3=2.35 N,while considering the wing shape and locations of the forward motors,d1=100 mm.After substitution in Eq.(22),the calculated value ford2is equal to 300 mm.Therefore,the distance of the aft motor from the leading edge in the root chord should be equal to 400 mm.
2.10.Final design of tilt-rotor MAV and equipment selection
After determining the dimensions of the wing,fuselage,vertical tail,control surfaces,and positions of the AC and CG,a final aerodynamic analysis using the 3D-panel method is performed to determine the aerodynamic performance of the designed tilt-rotor MAV.Different aerodynamic methods such as 3D-panel,VLM(Quad),and VLM(Classic)are applied on the tilt-rotor MAV,as shown in Fig.15.

Fig.11 Geometry and placement of vertical tail of MAV.

Fig.12 Rotational four-bar actuation mechanism and schematic view of rotation mechanisms.

Fig.13 Variation of pitching moment coefficient as a function of lift coefficient for tilt-rotor MAV.

Fig.14 Schematic view of tilt-rotor MAV in hovering mode.
The final aerodynamic and geometric characteristics of the designed tilt-rotor are presented in Table 5.In Fig.16,the diagrams of the lift coefficient,drag coefficient,lift-to-drag coefficient versus angle of attack, and lift versus drag coefficients,are shown,respectively.The wing in Fig.16 is analyzed using 3D-panel.As for the tilt-rotor MAV,it is analyzed with two Vortex Lattice Method(VLM),namely,Horseshoe Vortex(VLM1)and Ring Vortex(VLM2).
As presented in Fig.16,all of the analyses for a small angle of attack are close to each other,but with increasing this angle,the differences between the three methods become obvious,but acceptable.The VLM2 method shows more lift and drag compared to those of the VLM1.When the angle of attack is 2°,all of the methods(3D-panel,VLM1,and VLM2)show the maximum lift-to-drag ratio,respectively,equal to 17.8,19.3,and 20.5.

Fig.15 Variations of pressure,lift,and drag distributions on wing(3D-panel)and designed tilt-rotor MAV(VLM1).
Concerning the electrical components of the tilt-rotor MAV,various components are selected for the well-defined mission of this MAV.Based on understanding the performances of available equipment and the required factors for the defined mission,the best equipment is selected to have better endurance.31-33The final proposed equipment for this designed tilt-rotor MAV includes 3-cell highest capacity LIPO battery,2208/26 GOLD LINE(2),and AXI 2208/20 GOLD LINE(1),Futaba servo motor(FUTM0657)(4),Dual Sky 12A ESC,8-3.8propeller,JR 2.4-GHz receiver,and Paparazzi autopilot.The implementation and arrangement of these components inside the wing and fuselage should be accurate in such a way that the position of the gravity center is in the determined place(10 cm).In Fig.17,different views of CAD modeling of the designed tilt-rotor MAV are shown.It should be noted that the schematics for the equipment of the tilt-rotor MAV like propellers are not shown in exact dimensions.In the exact design of this drone,modification will be applied on the aft part of the fuselage to reduce the area that will block the stream of the tail rotor in order to keep the propulsion efficiency high during the hovering mode.

Table 5 Geometric and aerodynamic characteristics of tilt-rotor MAV in horizontal flight mode.

Fig.16 Variations of lift,drag,and lift-to-drag coefficients as a function of angle of attack,and lift coefficients as a function of drag coefficients for different aerodynamic analyses.

Fig.17 Schematic views of designed tilt-rotor MAV.
3.Conclusions
An optimized strategy for designing efficient tilt-rotor MAVs has been proposed.The design of these types of drones was composed of many steps including mission analysis,determination of the best aspect ratio and taper ratio,identification of the optimum wing loading,and weight estimation of the MAV.After performing all these design steps,the determination of the wing dimensions and airfoil shape was carried out with minimizing the drag force through an aerodynamic analysis.After that,the dimensions of the fuselage,vertical tail,and control surfaces were carefully determined.A tilt actuation mechanism was designed for propulsion system rotation.In this design,the wing shape was extracted from nature after inspiration from the bat wing shape and modified to implement fixture points for actuation and propulsion systems.
Acknowledgment
The authors gratefully acknowledge the financial support from New Mexico Space Grant Consortium.
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- A review of chatter vibration research in milling
- Impact of reduced frequency on the time lag in pressure distribution over a supercritical airfoil in a pitch-pause-return motion
- Thermal state calculation of chamber in small thrust liquid rocket engine for steady state pulsed mode
- Sliding mode control design for oblique wing aircraft in wing skewing process
- Adaptive optimization methodology based on Kriging modeling and a trust region method
- Aircraft engine fault detection based on grouped convolutional denoising autoencoders