基于相位特性的雷达假目标检测∗
2019-02-27杨帆
杨 帆
(解放军91404部队 秦皇岛 066001)
1 引言
科学技术的变革与更新是时代发展最明显的特征,这一点在电子信息领域尤甚,更先进、更有效的干扰手段,使得现代雷达工作在日趋复杂的电磁环境中,对其职能发挥提出了严峻的考验,对其性能也提出了更高的要求,比如基于数字储频技术(DRFM)的距离假目标干扰就被广泛应用于对抗线性调频脉冲压缩雷达[1~2],大量的假目标干扰一方面造成了雷达资源的严重浪费,另一方面容易使雷达在跟踪监视时难以区分和辨别,造成严重后果。因此对雷达在抗有源欺骗干扰方面的技术进行研究显得十分的急迫[3]。
现代雷达设备的抗干扰手段从其原理上来说可以大致可归纳为两种:一是通过频率选择、空间选择、波形设计和极化选择等方式[4]对雷达电波信号进行筛选等操作,滤除干扰信号,尽量减少进入到雷达接收机的干扰信号;第二种手段则是主要针对被接收机获取的干扰信号,此类信号进入到雷达系统内部之后,与目标信号混杂在一起,使得有用的信息难以提取,利用适当的信号处理技术,对干扰信号和有用信号在波形、频谱等结构上的不同加以区分,从而可以在混杂了干扰信号的回波信号中准确找到目标信息,达到抑制干扰的目的[5]。对于基于DRFM的距离假目标鉴别大部分都是利用回波的幅度信息、时延信息和多普勒信息,对于回波的相位信息研究较少[6]。
目标的相位特性是其多维特征的一种固有属性,是目标本身具有的特征信息[7]。飞机、导弹等扩展目标在角分辨单元内存在大量散射点,真实回波存在严重的脉内叠加,脉冲压缩后输出主瓣内的相位变化剧烈;而基于DRFM转发式假目标可视为点目标,不存在多个回波的叠加,脉压后主瓣内相位变化相对缓慢[8]。通过在雷达信号处理中提取真目标和假目标回波脉压后相位的曲线特性,通过设置合理的鉴别方法,将假目标从众多目标中进行筛选剔除,鉴别保留真实目标信息,是对抗假目标、降低干扰的一种重要的手段[9]。
2 线性调频信号脉冲压缩输出回波相位特性
为了获得远作用距离和高距离分辨率力,新体制雷达广泛采用脉冲压缩波形,其中线性调频信号是最常见的一种,接收时采用匹配滤波器对脉冲进行压缩[10~11]。脉冲串线性调频矩形脉冲信号第m个脉冲信号复数表达式可写成:
其中,m=0,1,…,M-1。 B为信号带宽,τ为脉宽,f0为载波频率,T为脉冲重复间隔,μ=B/τ为调频斜率,rect()为矩形脉冲信号。每个脉冲的慢时间为tm=mT,则脉冲串总时间为t=t̂+mT。
2.1 转发式假目标回波模型
转发式干扰机可看作单散射点模型,信号经散射点散射后,在一个脉冲内目标的径向速度大致是固定的,脉冲多普勒是不变的[12]。信号回波第m个脉冲可表示为
其中,A为信号幅度,Rj为经干扰机时延调制后假目标的距离,fd为多普勒频移,φ为初始相位,c为光速。在一个脉冲宽度内,脉冲多普勒频率可以认为是不变的。
经脉冲压缩后,输出信号回波第m个脉冲为
其中,a为匹配滤波器的幅度系数,t0为滤波器时延参数。
由上式可知,输出脉冲(脉冲压缩后)波形是一个具有sin x/x形式的窄脉冲,其主瓣两零点间宽度为2 B,当t=t0+Δt+mT-fdT/B,可得第m个脉冲输出信号峰值,设峰值时刻为零时刻,其相位特性可表示为 φo=2πfd(t-mT-fdτ/B)+φ ,一般情况下fd≪B,因此可认为主瓣范围内相位大致不变。
2.2 扩展目标回波模型
扩展目标在距离单元上存在大量散射点,假设单个距离分辨单元内每个散射点得距离用Ri表示,i=1,2,…,N。扩展目标回波信号经接收机低通滤波器后,第i个散射点的回波视频输出sreal(t,tm)i可表示为
其中,Ai、Δti=2Ri/c、φi、fdi分别为第i个散射点的回波信号幅度、时延、初始相位、多普勒频移,可认为每个散射点得多普勒频移均相同。所以,距离单元内总回波信号可以表示为

随着目标与雷达之间的相对运动、目标姿态角的随机扰动或者雷达发射信号的不断变化,各散射点的反射回波也在不断变化,这些回波发生相干合成,合成后的频谱形状与各散射点的距离、回波信号幅度、初始相位有关。经脉冲压缩后,输出信号
设N个散射点脉压输出峰值点时刻分别为t1,t2…tN,由上式可知

则扩展目标脉压后回波的相位特性为

3 基于相位特性转发式假目标鉴别算法
根据扩展目标线性调频信号脉压后信号模型可知,在无其它噪声的理想情况下,当距离分辨单元只有一个散射点时,其脉压后主瓣输出相位值与转发式假目标情况相同。当N>1,各散射点距离和初始相位一般不同,主瓣范围内的相位除了因多普勒频率引起非常缓慢的变化量以外,还包括了随时间变化的额外相位量,导致即使是无噪声的理想情况下,主瓣内相位较转发式假目标情况有显著区别,且该误差与各散射点的相对位置、幅度和初始相位都有关。
本文采用广义似然比检测算法,对是否存在转发式假目标进行检测。在算法中将转发式假目标与真目标分别记为H0与H1,其中假目标角度分辨单元内只存在一个散射点,真目标角分辨单元内则存在多散射点;假设发射信号采用线性调频信号,则可得到多组观测值记为。根据文献[2]可知,在单散射点情况下,已知采样点幅度和通道噪声方差的情况下,回波脉压后主瓣范围内相位服从方差为的高斯分布,本文假设回波脉压后主瓣相位服从高斯分布;在多散射点时,回波脉压主瓣范围内相位近似服从均匀分布。由此,可得在单散射点和多散射点情况下联合概率密度函数分别为

在H0情况下,使得似然函数的值达到最大的xˉ 为其最大似然估计 xˉ̂,且有


其中Y为检测统计量,λ为检测门限,检测门限值可根据Neyman-Pearson准则确定,即根据一定的虚警概率计算门限值。虚警概率Pf定义为在 H0情况下判别 H1的概率,检测概率PD定义为在在H1情况下判别 H1的概率。
在 H0情 况 下 ,根 据 式(13)可 知,1),不难看出,为N个标准正态分布的平方和,服从N-1个自由度的 χ方分布,即-1)。记,虚警概率Pf可以表示为
根据式(16),在给定 Pf的条件下,λ1可以查相应χ方分布表格获得,最终的检测算法可表示为

由于转发式假目标回波脉压后主瓣相位少了一个随时间变化的相位量A2,…,AN),因此统计量Y在转发式假目标条件的值要小于在真目标条件下的值,这就是检测算法的核心思想。
4 仿真结果和分析
仿真中将线性调频信号作为雷达的发射源,参数如下:脉宽=1.6×10-4s,脉冲重复间隔=1.6×10-2s,发射机峰值功率=2×105W,发射频率=5GHz,带宽=1MHz,目标多普勒频移=1kHz,匹配滤波采用Hamming窗,匹配滤波后的采样频率=8MHz。
基于上述参数条件,信噪比=15Db,得到如图1所示的仿真结果,其中,圆形为转发式假目标,三角代表扩展目标。从图中可以看出,扩展目标脉冲压缩输出主瓣内的相位特性与转发式假目标主瓣内的相位特性存在较大的区别。雷达在接收回波信号时,当同一个分辨单元接收到了扩展目标的多个散射点,不同信号之间存在相干合成现象,经过不同程度的合成,回波信号的幅度、相位信息会发生较大的畸变,这在其回波信号的频谱形状上体现的尤为明显,而回波信号的畸变直接导致匹配滤波输出的波形发生展宽或者变形等现象,因此,最终脉压压缩输出后主瓣内相位会发生比较剧烈的变化。
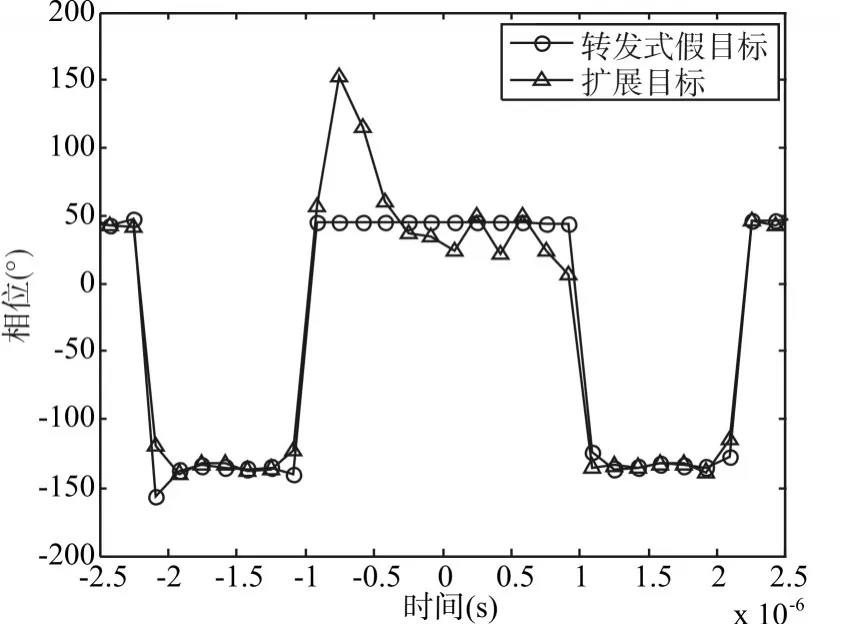
图1 转发式假目标和扩展目标回波脉压输出相位特性
为了验证鉴别算法的有效性,本文进行1000次蒙特卡洛仿真试验。每次仿真采用回波脉压后主瓣范围内相位一段较长的数据点,其较高的方差估计精度将有利于算法鉴别的准确性;但又不能采用太长的观测数据,这样会造成雷达数据处理器效率大幅度降低。最有数据长度的确定将受扩展目标散射点位置、运动情况和信噪比等因素影响,为此仿真采用序贯检验的思想,每组仿真实验先至少选择10组数据点进行方差统计,根据其结果再决定是否需要更多的数据点,或是停止采样,其方法有利于解决最优数据长度的选择性问题。根据仿真结果对鉴别算法的判决结果如表1所示,从表中我们可以看出:扩展目标的正确识别概率为97.3%,而转发式假目标的识别率达到99.5%。

表1 识别结果
5 结语
扩展目标在距离分辨单元内存在多散射点,信号回波经脉压输出后主瓣范围内相位产生抖动;基于DRFM转发式假目标可视为点目标,回波经脉压输出后主瓣范围内相位大致不变。本文根据目标回波相位这一差异,分别对相位采样值方差进行分析,建立其观测统计模型。通过分析扩展目标与转发式假目标脉压后主瓣内相位观测值方差的差异,利用序贯检测法进行正确的判别。蒙特卡洛仿真结果充分验证了检测算法的有效性。
