基于通用接口的无人艇互操作通信系统构建∗
2019-02-27宫明慧宋大勇
宫明慧 宋大勇
(海军航空大学 烟台 264001)
1 引言
近年来,无人智能系统快速发展,主要包括无人机(Unmanned Aerial Vehicle,UAV),无人水面艇(Unmanned Surface Vehicle,USV),无人水下潜航器(Unmanned Underwater Vehicle,UUV)和无人车(Unmanned Ground Vehicle,UGV)等。其中,无人机发展时间最长,技术最成熟,但自2000年以来,以无人艇为代表的其他无人系统呈爆发式发展态势,无人艇的种类日趋增多,功能日益完善。无人水面艇是指具有自主规划、自主航行能力,并可自主完成探测感知、通信传输等任务的小型水面平台。无人艇根据使命任务的不同,可采用多种不同的设备模块,搭载不同的传感器或任务设备,执行任务也呈现多样性。
在现代作战中,无人艇通常充当着探路先锋和敢死队的角色,其上搭载着各种传感器载荷和轻小型武器系统。主要代替作战人员执行危险或耗时耗力的任务,在提高作战效能的同时不断降低作战人员的伤亡。随着无人艇技术的快速发展,各种海上作战的需要,无人水面艇在未来作战中将发挥越来越重要的作用,成为己方战斗力的“倍增器”。
随着无人系统技术的发展及其在战场上的普及应用,各国之间、各军兵种之间、不同类型、不同功能无人艇系统的协同作战问题日益突显,尤其在多国联合作战情况下。无人艇系统操作人员短缺、成本、互操作技术薄弱等问题也相继出现。研究制定无人艇系统互操作性标准,研制能够在不同军兵种、不同公司的不同类型、不同功能的无人艇系统的需求日益迫切。
2 无人艇作战模式分析
2.1 信息支持
无人艇是信息化联合作战的重要节点,可搭载雷达、声呐、无线通信、光学、电子战等综合探测通信设备,在作战区域和复杂海域,凭借小型化、隐身化、低海拔特点,执行侦查、巡逻、警戒、通信中继、电子干扰等任务,为联合作战信息链提供战场信息并实现实时传输,协助夺取战场制信息权。
2.2 协同作战
无人艇可与直升机、无人艇、水面舰艇协同作战,通过构建一体化作战信息网络,实现战场信息全网络节点实时传输与接收;通过自身搭载和投放水雷、鱼雷、火箭弹、电子对抗等武器装备,在作战区域与复杂海况环境执行反潜、反舰、反水雷、电子战等作战任务;通过联合作战数据链,引导直升机、无人艇、水面舰艇发射导弹精确打击目标,具有低成本、无伤亡、高效率的特点。
2.3 支援保障
无人艇是两栖作战部队的重要武器装备,代替有人装备在近海浅滩等复杂海域执行后勤补给、海况测绘、地形勘察、搜救救援等任务,依靠高速机动、灵活便捷的优势,为两栖作战部队提供可靠的后勤保障和作战支持。
3 无人艇通用接口分析
海上作战呈现通用化、信息化发展趋势,现代海战场面临高度对抗性、高度不确定性、高度动态性特点,无人艇的作战样式已逐步从单平台作战向多平台“集群”作战的方向发展。一方面,未来海战场环境越来越复杂,单艘无人艇所能执行的任务能力有限,生存能力受到越来越大的挑战,而多艘无人艇协同作战,通过能力互补和行动协调,则能够提升整体作战效能。另一方面,无人艇的自主能力不断发展,将逐步从简单的遥控、程控方式向人机智能融合的交互控制、甚至全自主控制方式发展,无人艇将具备集群协同执行任务的能力。通用接口是实现无人艇互联互通、集群作战的基础条件。
北约通用接口标准STANAG 4586规定了一系列智能无人设备通用接口的硬件标准和技术协议。美国、以色列等无人智能设备研制大国已陆续采用北约的标准研制通用控制系统和数据链,STANAG 4586是目前常见的互操作标准。
无人艇系统需要一个互联互通互操作的功能性结构,开发一系列支持现有及未来各种类型无人艇的标准化通用接口:无人艇核心控制模块(CUCS)和无人艇之间的接口(数据链接口,Data Line Interface);CUCS和外部C4I系统之间的接口(命令和控制接口,Command Control Interface);CUCS和USV系统操作员之间的接口(人机控制接口,Human Computer Interface),如图1所示。
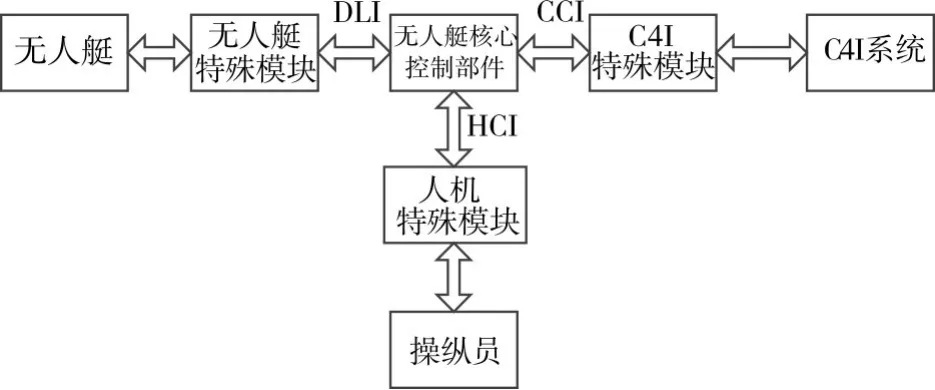
图1 无人艇通用接口示意图
无人艇特殊模块(VSM)是一座无人艇核心控制系统与无人艇平台专有系统进行沟通的桥梁,通过DLI标准接口实现无人艇与核心控制系统既相互独立又相互联系,确保无人艇及其部件的更换维修不会影响到无人艇系统中其他部件的完整性。VSM与无人艇内部的专有协议是完全独立的,执行附加的转换协议。从无人艇的专门协议转换到UCS的通用协议,以此将孤立的无人艇加入到无人艇互联互通互操作系统中。
人机特殊模块(HCISM)通过HCI标准接口实现外部操控系统与核心控制系统相互独立,执行附加的转换协议,在CUCS与操纵员间实现信息传输与通信,将孤立的外部操控设备加入到无人艇系统中。
命令和控制特殊模块(CCISM)是以服务于无人艇核心控制系统为目标,通过CCI标准接口实现外部C4I系统与核心控制系统相互独立的工艺架构,确保将更多的C4I系统与部件纳入到无人艇系统中。
4 常见无人艇的通信方式(艇载有线通信方式、无线通信方式)
无人艇通信包括无人艇内部设备通信、测控站内部通信和无人艇与测控站之间的无线通信。无人艇内部网络通信是指艇内各个设备部位之间的通信,测控站内部通信是指测控站或其他控制终端与C4I部位、人机部位之间的通信,一般是有线通信,主要通过数据终端(如计算机、服务器等设备)、网线、路由器和交换机等设备实现,设备内部运行专有通信协议,设备间运行通用通信协议,不同部位通过光纤总线相连,实现信息互联互通。无人艇与测控站之间的通信是指艇艇、艇岸之间的网络通信,一般是指无线通信,目前主要通过短波通信、卫星通信和微波通信方式实现,实现起来较为复杂。通过通用接口实现无人艇系统的互操作性主要研究有线通信的通用协议和无线通信。
4.1 光纤通信
光纤通信是利用光波作载波,以光纤作为传输媒质将信息从一处传至另一处的通信方式,被称之为“有线”光通信。当今,光纤以其传输频带宽、抗干扰性高和信号衰减小,而远优于电缆通信的传输,已成为有限通信中主要传输方式。光纤通信总线是无人艇系统电子设备实现综合化、数字化和智能化的核心和支柱,对实现电子设备功能的综合、提高无人艇的作战能力和生存能力起着重要作用。
4.2 短波通信
短波通信在远距离通信方面一直占据重要地位,被认为是有效而经济的海上通信手段,广泛地应用于海上战略和战术指挥通信中。
短波通信是利用波长为100m~10m,3MHz~30MHz的电磁波进行的无线电通信,主要靠天波传播,可经电离层一次或数次反射,最远可传上万公里,广泛用于语音、电报和数据传输。短波通信有着许多显著的优点,与卫星通信、微波通信、光纤通信相比,短波通信无需建立中继站即可实现远距离通信,建设和维护费用低,建设周期短;设备简单,可以根据使用要求设置,进行固定或移动通信;临时组网方便、迅速、具有很大的使用灵活性;设备体积小,容易隐蔽,可用较小的发射功率直接进行远距离通信;抗干扰能力强,难摧毁,是无人艇远程通信的重要手段。
4.3 卫星通信
卫星通信是指地球上的无线电通信站利用具有信号放大变频功能的卫星作为中继而进行的通信。卫星通信系统由地球同步中继卫星和地球通信站两部分组成。它主要具有通信范围大,可靠性高等特点。只要在卫星发射的电波所覆盖的范围内,从任何两通信站之间都可进行通信,并且不易受陆地灾害的影响。由于无人艇在海上航行海域较大自主航行对数据可靠性要求非常高,因此卫星通信非常适合无人艇与测控站之间的通信。
4.4 微波通信
微波通信是指使用波长在1mm~1m之间的电磁波(即微波)进行的通信。其对应的频率范围是0.3GHz~300GHz。微波通信系统由各微波通信基站组成。它具有可用频带宽、通信容量大、传输损伤小和抗干扰能力强等特点,可用于点对点、一点对多点或广播等通信方式。由于微波波长很短,其在空中传播特性与光波相近,只能直线前进,因此两基站微波通信距离最远是视距,超过这个距离就需要进行中继转发。由于海上遮挡物和电磁干扰都很少,因此微波通信也是舰船无人艇无线通信的常用手段。
当存在多套通信设备时,各设备之间的兼容互通往往存在问题,未来的无人艇通信系统需要具备互联互通互操作功能以解决兼容性问题。
5 基于通用接口的无人艇通信系统架构
5.1 有线通信
5.1.1 互操作等级
STANAG 4586规定了无人系统互操作的五个等级,如表1所示。
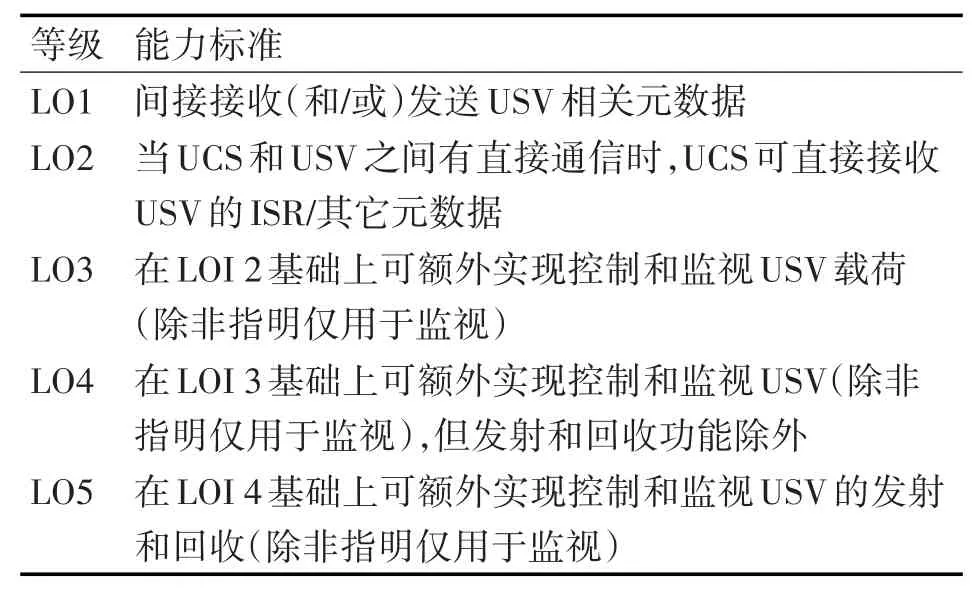
表1 无人系统互操作等级列表
5.1.2 标准通信协议和信息集
为实现无人艇的互操作设计,DLI、HCI、CCI等通用接口要遵循标准通信协议和信息格式。通用接口包含两个主要组件。第一个组件是最小通用消息集,能够支持CUCS功能和通用无人艇数据需求的无人艇和任务载荷单独工作。第二组件是实现从无人艇/艇载数据终端到CUCS的无人艇特定信息的通信,以便远程显示无人艇专有特定信息。
1)标准通信协议
通用接口主要遵循下列通信协议:
(1)因特网协议IPv6
(2)传输控制协议(TCP)
(3)用户数据报协议(UDP)
(4)超文本传输协议(HTTP)
(5)Web浏览器(例如Netscape或Internet Explorer)
(6)文件传输协议(FTP)
(7)网络时间协议(NTP)。
2)最小通用信息集
为了实现通用接口与无人艇/艇载数据终端/CUCS的信息交换,提高系统互操作性,需要定义无人艇系统最小通用消息集,该消息集包括以下内容的控制和状态消息:
(1)无人艇
(2)任务载荷
(3)数据链
(4)告警系统
消息集包含的是与无人艇专有信息和任务载荷无关的无人艇通用数据,这使得通用接口不需要修改标准也能适应多系列的无人艇或任务载荷。此外,消息集使接口具备了通过CUCS-HCI显示多类型无人艇系统和信息的能力。
5.2 无线通信
无线通信系统用于完成无人艇与测控站之间的数据交换与通信工作。无人艇通过无线通信传输链路接收测控站操作人员的遥控指令,控制无人艇相应设备相应动作从而实现对其的遥控。同时无线数据通道将无人艇的航行数据(包括航速,坐标,航向,航迹等)、雷达数据、光电探测数据等,传输到测控站。
考虑遥控艇航程远,为保证视距内和视距外的通信、操控等需要,无线通信系统主要由短波、微波及卫星通信组成。短波通信数据量较小,只能将艇上观测系统测得的数据综合,对重要数据压缩后通过短波无线链路传到测控站。而微波/卫星通信数据传输数据率相对较高,误码率低,传输可靠,可以实现视距内/视距外的较大数据量的实时传输。工作中根据通信距离选择合适的通信链路,同时各链路互为备份,以提高无人艇的工作可靠性。
5.3 无人艇通信系统架构
为了在艇载数据终端和接收数据终端间实现信息实施传输,需要构架遵循STANAG 7085数据链标准,为实现数据终端间的实时通信,使从海面发送的图像和管理数据能够根据需要通过地面(包括海面,空中)指挥、控制和链路管理数据终端进行分发,必须准确描述通信所需的数据链的总体要求、系统功能模型、接口及其特性、保密要求、链路管理以及通信协议等通用技术规范。
无人艇通信系统结构如图1所示。
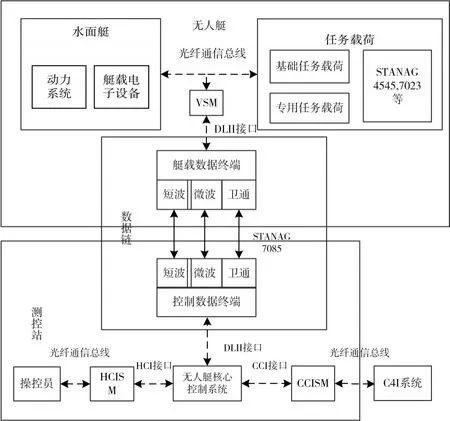
图1 无人艇通信系统结构图
6 结语
基于通用接口的无人艇通信系统对无人艇实现互操作具有重要意义,是实现空海一体化联合作战的关键环节,能有效提升战场信息利用率,降低作战成本,提高作战效率。解决了通信系统的标准化问题,能大大加快无人艇通用平台的模块化和标准化建设进程,大大提高无人艇系统的通用性和交互操作性,达到期望的协同作战水平。
