无人机电磁弹射控制策略分析与优化
2019-02-25李俊,吴峻
李 俊,吴 峻
(国防科技大学,长沙 410073)
0 引 言
在现代信息化战场上,百千克级的中型无人机在信息化、自动化的现代战场上被越来越广泛地使用,针对无人机的相关研究也正如火如荼地开展[1]。在无人机的作战使用中,起飞阶段往往被认为是最困难、最关键的阶段之一。由于机型和作战任务的不同需要,无人机的起飞方式多种多样,目前常用的起飞方式有滑跑起飞、火箭助推、气液压弹射起飞、手抛发射等[2-5]。
作为无人机起飞发射使用的主流方式之一,火箭助推发射是通过火箭助推器使无人机借助火箭发射动力获得相应的起飞高度与速度。文献[6]中火箭助推无人机起飞的整个过程中,无人机实际的高度与速度情况与预期存在明显差距,系统不能对无人机的速度和高度进行有效的实时控制,无人机在发射后处于速度波动较大的状态。
现有的气动、液压弹射采用开环控制的方法,根据无人机质量和加速距离,计算出弹射所需推力,恒力推动无人机加速。这种方式为保证无人机达到规定速度,计算出的推力需具有一定裕量,因此很难充分利用弹射器的加速距离,这将直接增加弹射器输出功率的负担。文献[7]通过建立弹射过程的数学模型,得到了弹射过程中关键工作参数对弹射性能的影响,但是系统无法实现对弹射过程中无人机实现实时控制,无人机起飞过程中速度波动较大,易导致无人机与机载设备的损坏。
无人机电磁弹射器作为一种新的发展方向,可以弥补传统发射方式的不足,其最大的特点就是具有全程可控,波动小[8-10]。为了适应现代战争快速、机动、灵活的要求,考虑到陆基无人机弹射器一般采用车载或车拖的方式,因此弹射器的体积和质量应小,以方便运输,满足机动性要求。
在提升无人机电磁弹射系统的机动性方面,要求降低系统的质量,提升功率密度。这里的功率密度通常有两种定义,一种是输出功率与质量的比,即功率/质量,单位为 kW/kg;另一种定义是输出功率与体积的比,即功率/体积,单位为kW/m3。本文采用功率与质量的比作为功率密度的定义标准。
目前,针对提高电磁弹射系统功率密度的研究主要集中在永磁电机的参数设计与电机驱动器等方面。文献[11]通过有限元仿真的方法对电机的参数进行优化设计,以提高电机的功率密度。文献[12]利用SiC MOSFET耐高温的特点,在设计基于SiC MOSFET变流器时,考虑其结温的工作温度更高,减小散热器,从而达到提高功率密度的目的。文献[13]利用SiC MOSFE的开关频率高的特点,在相同的电压电流纹波条件下,可减少无源器件的使用,以提高功率密度。
通过对电磁弹射系统的分析可知,现有陆基无人机电磁弹射系统多采用能量密度大的铅酸蓄电池作为储能装置,以满足电磁弹射器的多次弹射对能量的需求。同时,现有弹射系统通常采取恒加速度的控制策略,系统输出功率会随速度增大而增大,需较多数量蓄电池才能确保系统的正常工作,直接导致储能装置普遍较重,功率密度较低。
针对上述由于系统控制策略导致的储能装置功率密度低的问题,本文通过对现有电磁弹射器控制策略的分析,研究一种恒功率限制控制策略,在能够满足弹射器基本要求的前提下,可有效减少储能系统蓄电池数量,提高弹射系统的功率密度。
1 电磁弹射系统组成与特性分析
1.1 电磁弹射系统组成
如图1所示,电磁弹射系统主要包括直线电动机、储能系统、功率变换系统、检测与控制系统等。各部分紧密联系,又相互独立。直线电动机作为电磁弹射器的执行机构,为飞机提供加速的推力;检测系统获得电磁弹射系统各个部分的信息,并将其提供给控制系统;控制系统通过检测系统提供的位置信号和电压、电流等参量,实现对直线电动机的控制;功率变换系统将储能输出的直流电逆变为电机所需的交流电,为电机提供能量通路;储能设备作为电磁弹射器的能量源,为电机提供能量。

图1电磁弹射系统结构框图
1.2 电磁弹射系统工作特性
为了合理设计无人机电磁弹射器的控制策略,应充分分析电磁弹射器的工作特性。
电磁弹射系统需要在规定距离内将一定质量的无人机加速到规定起飞速度, 系统具有弹射时间短(一般为秒级)、加速距离较短、末速度高、输出推力大等特点。同时,系统对加速距离和末端速度有严格要求,与美国EMALS系统类似,允许加速终点末速度偏差范围在0~1.5 m/s[14]。
电磁弹射系统的可控变量为直流端输入电压U、电机电枢绕组电流I、输出推力Fe以及动子速度v。其中U是直接可控变量;I,Fe,v是间接可控变量。因此,系统一般根据无人机质量、起飞速度以及加速距离等参数,计算分析得到所需的推力,从而控制输入端的电压与电流大小,使直线电动机输出相应推力。
弹射百千克级无人机的电磁弹射器加速距离通常在10 m左右,弹射过程加速时间短。弹射器加速距离利用不充分,会增加无人机电磁弹射器的输出功率负担。故需要对电磁弹射过程施加闭环控制,使弹射同时满足加速距离和末端速度的要求。
2 电磁弹射器控制策略分析与优化
关于电磁弹射器的闭环控制,最直接的想法是采用速度闭环控制。但是单纯以起飞速度作为参考速度来控制弹射过程,相当于对速度参考信号的阶跃响应,难以满足充分利用加速距离的要求。因此本文研究一种控制策略,即设定弹射过程的速度参考曲线,控制弹射器跟随速度参考曲线推动无人机加速,使得无人机在弹射器末端以期望的速度起飞,同时充分利用了加速距离。
本文的电磁弹射系统采用永磁无刷直流电动机作为推力输出单元,该电机会存在一些因自身特性而导致的扰动,如因齿槽效应和纵向边端效应产生的磁阻力,因电流换相引起的换相推力脉动,因非理想磁通密度波形以及其他电机参数变化引起的推力波动等。对于这些扰动,可在弹射器控制算法中进行补偿,以达到减小甚至消除扰动的影响。因此,在分析与优化控制策略时,可忽略上述由于电磁弹射器本身特性而存在一些扰动。
“不死鸟”无人机是百千克级无人机的典型代表之一,起飞速度120 km/h,最大加速度承载能力6g。本文就以该型无人机参数为例进行分析和优化。
2.1 恒加速度控制策略分析
目前,关于直线电动机的控制策略主要以恒推力控制策略为主,于是大部分弹射系统均采用恒加速度的控制策略,即控制无人机以恒加速度弹射加速起飞。
假设整个弹射过程均处于恒加速度状态,则加速过程的加速度:
(1)
式中:vt是无人机起飞速度;l是加速距离。
如图2所示,电机动子与无人机所受阻力主要考虑两种,一种是重力造成的阻力,与弹射轨道倾角有关;另一种是无人机在加速过程中受到空气的阻力Fd,则动子所受合力Fa满足:
Fa=ma1=Fe-FG-Fd(2)
FG=mgsinθ+μfmgcosθ(3)
式中:μf为动子受到导轨的摩擦力系数;S为机翼面积;CD为阻力系数;ρ为空气密度;v为无人机实时速度。

图2弹射系统示意图
联立式(1)~式(4),根据“不死鸟”无人机的系统指标,取vt=33.3 m/s,l=10 m,m=260 kg,θ=24°,μf=0.1,ρ=1.225 kg/m3,S=2 m2,CD=0.1,即可得到恒加速度控制策略下的速度参考曲线。
2.2 恒功率限制控制策略
根据前面的分析,采用恒加速度控制策略时,可以发现,由于推力恒定,加速过程中无人机速度越来越大,电磁弹射器的输出功率也越来越大,瞬时电流大,这就要求电磁弹射器的功率器件和供电电源具有较高性能,即储能系统需要较多的蓄电池才能满足要求,这直接导致储能系统质量较大,系统的功率密度较低。
为了解决上述问题,在恒加速度控制策略的基础上,本文提出恒功率限制控制策略。在低速阶段,按照无人机最大可承受加速度对其进行加速,尽量充分利用系统的额定功率,直至系统输出功率到达设定最大值后,系统将控制功率输出保持不变。该策略的主要难点在于寻求一个最优的系统峰值功率点,使无人机恰好在加速段终点达到起飞速度的同时能够提高系统功率密度。
设采用恒加速度控制策略时电磁弹射器的峰值功率:
Pmax=Favt(5)
现作如下限制:
Pc=δPmax,0<δ<1 (6)
a(τ)≤amax=λa1,λ>1 (7)
式中:Pc为无人机弹射过程中电磁弹射器的输出功率理论最大值;λ由无人侦察机所能承受的最大加速过载决定。加速过程中满足如下:
Pc=Fe(τ)v(τ) (8)


vt=v(t) (12)
l=s(t) (13)
为了求得恒功率限制策略中的系统峰值功率的最优解,联立上式,设计的计算程序流程图如图3所示。

图3恒功率限制策略峰值功率最优解计算流程图
取m=260kg,θ=24°,vt=33.3m/s,l=10m,λ=1.06,μf=0.1,可得δ=0.82。即恒功率限制控制策略的峰值功率为恒加速度控制策略的82%。两种方法所得的速度参考曲线如图4所示。
当无人机的质量和起飞速度不同时,均可以通过上述方法得到速度参考曲线,来控制电磁弹射器,实现弹射不同型号无人机的功能。
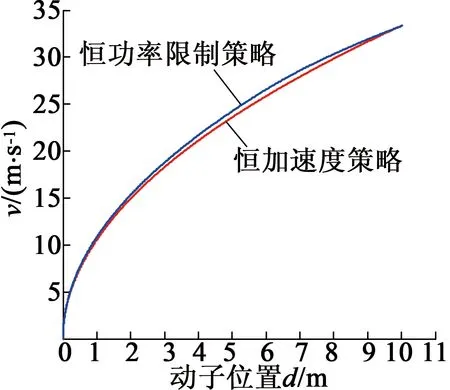
图4两种控制策略的速度参考曲线
3 控制器设计
从速度参考曲线中可以获得速度-位移信息和加速度-位移信息,以此可以设计电磁弹射器的控制器。
在恒加速度控制策略中,加速度为常值,速度可以用解析公式表示。在恒功率限制控制策略中,加速度和速度只有数值计算解,所以考虑用折线拟合速度参考曲线。在弹射轨道上取等距的若干个点sk,由速度-位置曲线可得各个点对应的速度vk。近似认为在各点之间是恒加速度运动,则速度曲线由折线拟合,各段上加速度恒定,并由下式求得:
(14)
电磁弹射器中的直线电动机选择永磁无刷直流直线电动机,电机的电压平衡方程:
(15)
电机的输出推力:
(16)
对于电机,输入是直流端电压,输出是推力,而推力由绕组电流决定。所以首先针对电机的特性设计电流调节器对电流进行闭环控制。
电磁弹射过程中会受到摩擦力、重力、空气阻力等的干扰。速度参考曲线的折线拟合,使得恒加速度策略和功率限制策略都能将系统响应视为对加速度参考信号的阶跃响应和对速度参考信号的斜坡响应。通过速度-位移参考曲线和加速度-位移参考曲线,本文设计了加速度调节器和速度调节器,对无人机电磁弹射器进行闭环控制,使得电磁弹射器有优秀的性能和较强的抗干扰能力。此类控制问题已得到充分研究,可以根据已有的研究成果设计控制器。
图5为电磁弹射系统的系统框图。通过引入反馈闭环控制,能使系统具有较好的鲁棒性,并且满足无人机弹射要求。
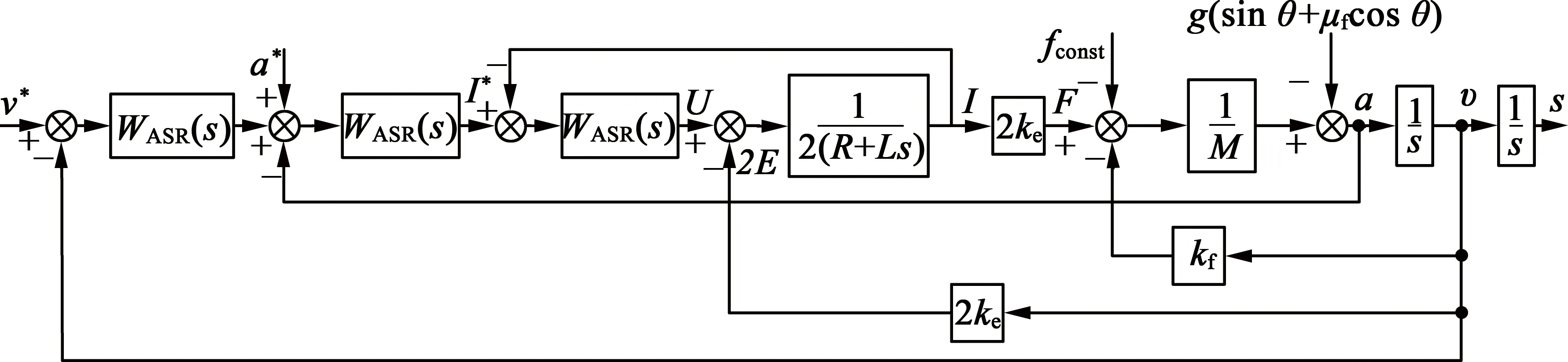
图5电磁弹射系统的框图
4 仿真结果分析
根据系统框图,在MATLAB/Simulink中搭建了系统模型。系统参数如表1所示。
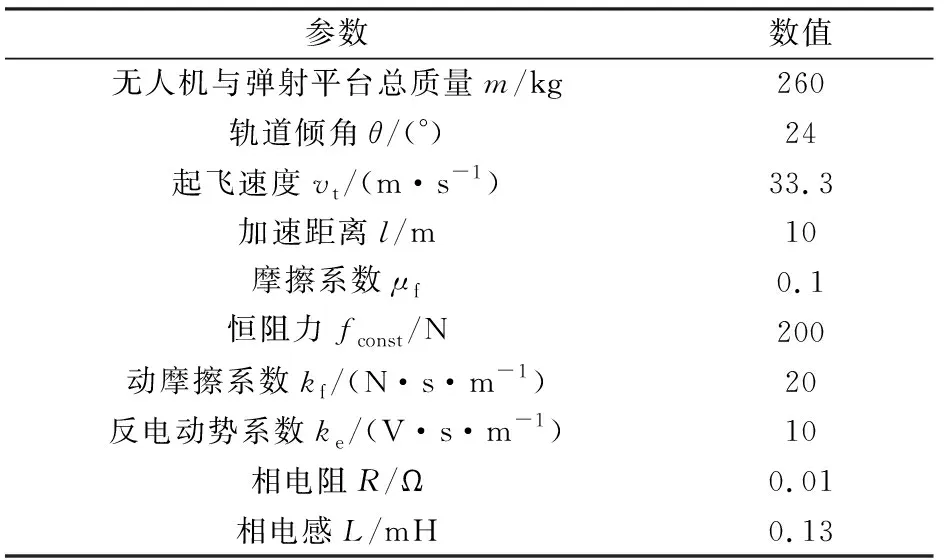
表1 仿真系统参数
图6为两种控制策略下弹射系统输出推力、功率及无人机速度随位置变化的对比图。
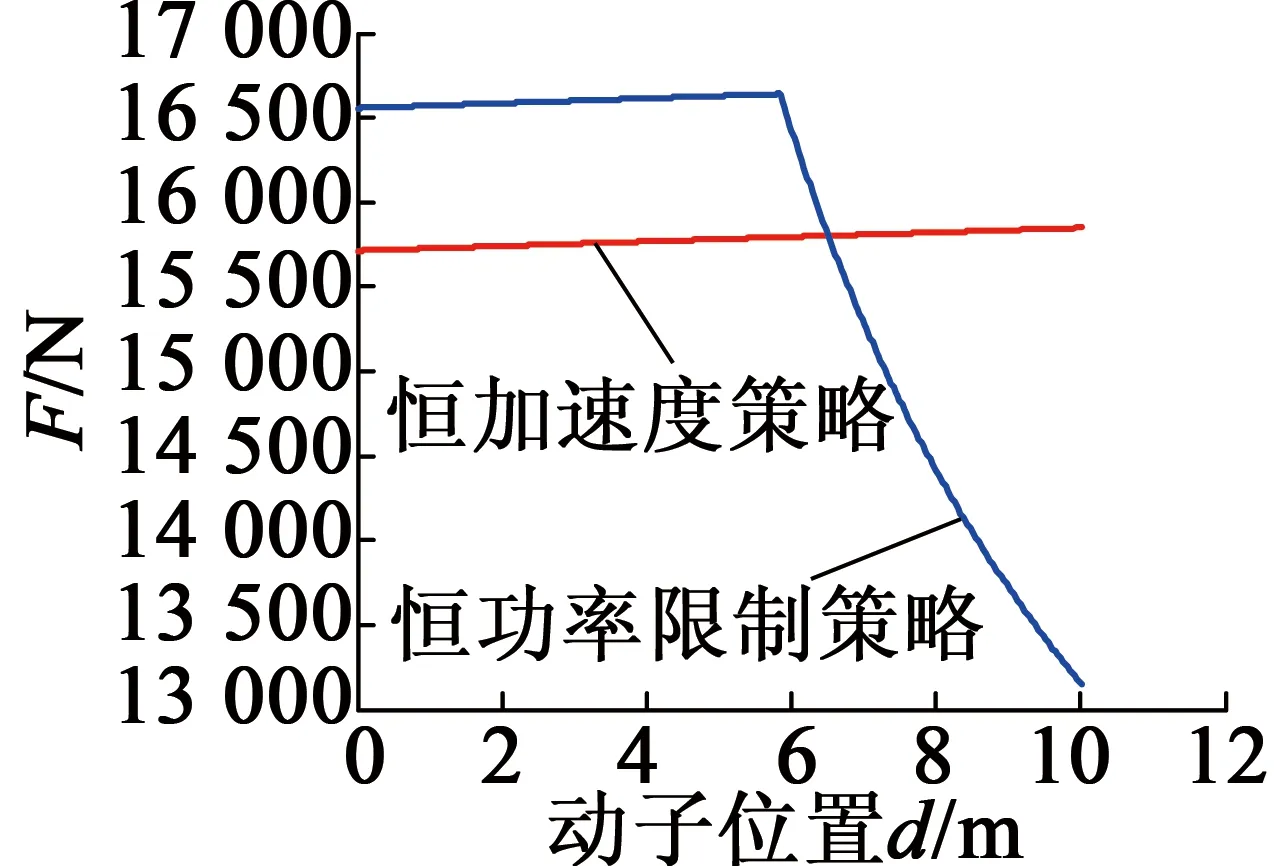
(a) 系统推力输出变化
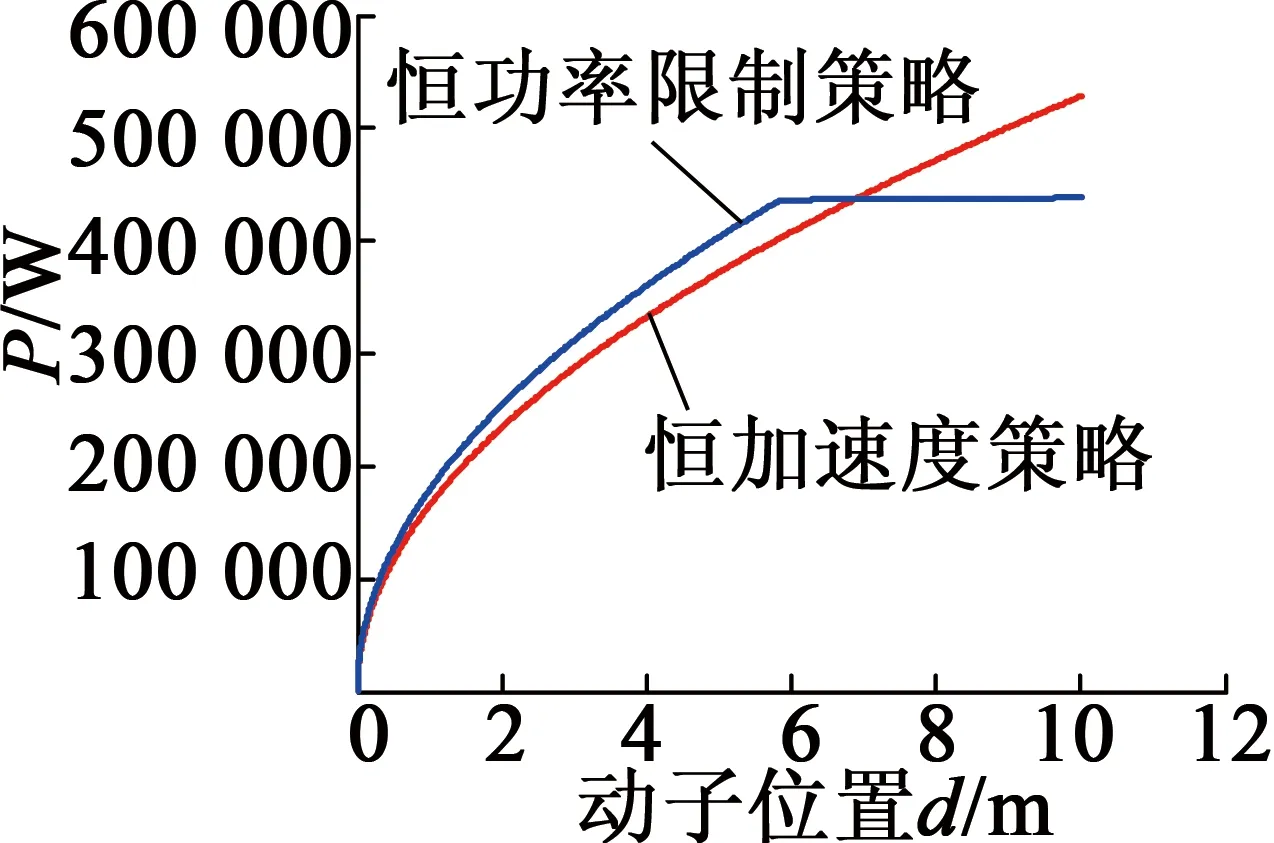
(b) 系统功率输出变化
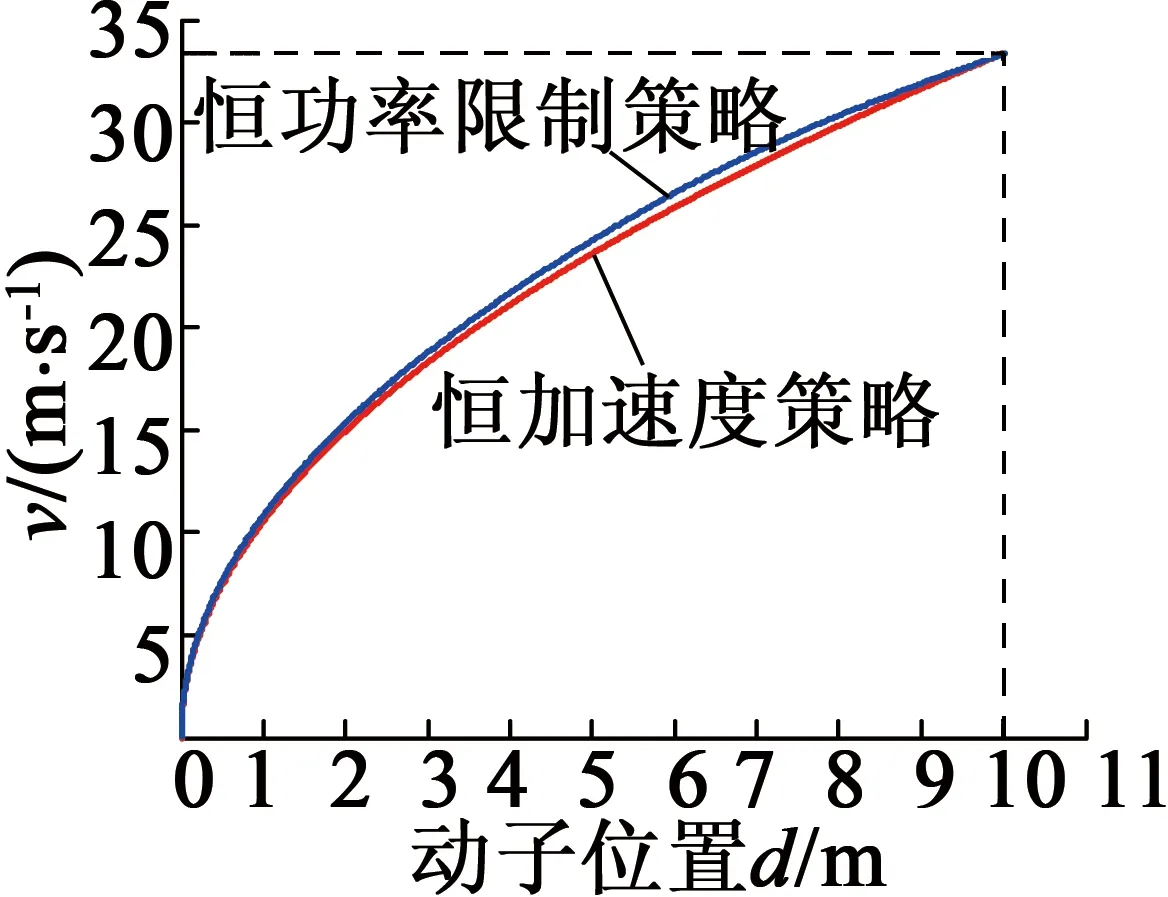
(c) 无人机速度变化图
图6两种策略下系统输出推力、功率及无人机速度随动子位置变化对比图
仿真结果显示,恒加速度策略和恒功率限制策略都能较好地满足弹射起飞的要求。采用恒加速度控制策略时,单次弹射用时约为0.6 s,系统最大输出推力为15.85 kN,最大输出电流为1 769 A,最大输出功率为528 kW;采用恒功率限制控制策略时,单次弹射时间为0.585 s,系统输出最大推力为16.64 kN,最大输出电流为1 863 A,最大输出功率438.23 kW。
实际中,考虑到电机的效率和一定的裕量,采用恒加速控制策略时,设定电机的峰值功率为600 kW,则电机所需供电电压为300 V。目前主流铅酸蓄电池提供电压为12 V,单个质量约为38 kg,则需要25个蓄电池串联使用,储能系统总质量为950 kg。而弹射一次所需的能量约为158 210 J,此时储能系统的功率密度为0.28 kW/kg。
采用恒功率限制控制策略时,系统则只需要20个蓄电池串联使用进行供电,储能系统的质量减轻至760 kg,考储能系统的功率密度为0.36 kW/kg。相较于前者,功率密度提高了29%。
5 结 语
本文通过对电磁弹射器工作特性的分析,针对由于系统恒加速度控制策略导致的储能装置功率密度低的问题,通过对现有电磁弹射器控制策略的分析,研究了一种恒功率限制控制策略,并设计了相应的控制器。仿真结果表明,该控制策略能够使电磁弹射器满足无人机弹射起飞的要求,系统的峰值功率仅为恒加速度控制策略的82%,有效减少了储能系统蓄电池数量,降低了系统对电力电子器件和供电电源的要求。相比于优化前,储能系统的功率密度提高了29%,进一步提升了系统的机动性。
