纯电动客车制动电阻回馈方案设计
2019-02-25梁丰收姜昆明
梁丰收, 林 超, 姜昆明, 杨 伟
(比亚迪汽车工业有限公司, 广东 深圳 518118)
纯电动客车在动力电池满电时为避免电池过充损坏,禁止回馈制动,因此引发车辆的制动性能下降,在不同SOC下的回馈制动力一致性差。另外对于轮边驱动桥结构的纯电动客车,驱动电机与车轮间无传动轴[1],难以加装缓速器,当车辆满电时,也无法执行回馈制动,不能满足GB 12676—2014中IIA型试验(缓速制动性能)要求[2]。有方案提出利用超级电容或大电感并联在电池两端以存储回馈能量[3]。由于在IIA型试验中要求缓速制动的平均回馈功率和回馈总电量要大,所以这种方案要匹配相应等级的电容或电感在成本和体积上不可取,且该方案只能存储能量,电容或电感无法消耗能量,还需提供额外途径给其放电。
本文针对纯电动客车设计一种满电回馈方式,利用制动电阻释放回馈电能,使车辆在全SOC范围内都能执行回馈制动,满足标准要求,提升制动性能。
1 制动电阻回馈方案
1.1 制动电阻回馈原理
车辆执行制动回馈时,整车控制器将蓄电池不能吸收的回馈功率发送给电阻控制器,由制动电阻释放。电阻控制器通过IGBT管将制动电阻接入电池回路,并由PWM波调节电阻两端电压控制释放功率P的大小:
P=U2/R
(1)
式中:U为控制器输出电压端电压,最高电压为母线电压;R为制动电阻阻值。
制动电阻回馈原理图如图1所示。
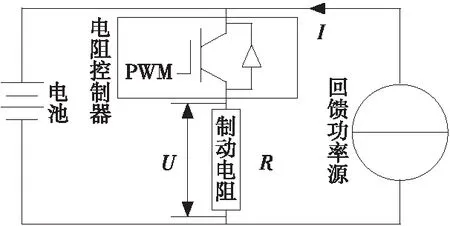
图1 制动电阻回馈原理图
1.2 制动电阻功率计算
在纯电动车的IIA型试验中,车辆依靠电机的回馈扭矩致使车辆在斜坡上受力平衡从而匀速下滑[4]。车重越大,所需电机回馈扭矩越大,产生的回馈功率也就越大[5],因此需匹配相应等级的制动电阻来释放回馈功率。
以某纯电动客车(质量为9 700 kg)为例,根据GB 12676—2014中IIA型试验(缓速制动性能)条件,计算出车重对应的电机回馈扭矩和回馈功率[2]。
已知车辆在7%斜坡上受力平衡:
F+f1+f2=mgsinα
(2)
轮胎滚动阻力:f1=μmgcosα
(3)
整车风阻:f2=CAv2/21.15
(4)
电制动回馈功率:PB=F·v
(5)
回馈扭矩:T=F·R·η/n
(6)
式中:α为试验坡度,tan α=0.07;μ为30 km/h车速下车轮的滚动阻力系数,值为0.006 51;A为车辆迎风面积,值为7.44 m2;C为风阻系数,值为0.62;η为机械轴的效率,值为0.913;v为试验要求的匀速速度,30 km/h;R为车轮滚动半径,值为0.513 m;n为减速器速比,值为8.5。
将相关参数代入以上各式求得:电机需提供回馈功率44.6 kW,回馈制动扭矩322 N·m。试验中要求电池满电,回馈能量须全部由制动电阻释放[6],所以匹配制动电阻的额定释放功率应不小于44.6 kW,本方案选取电阻额定释放功率为44.6 kW。
1.3 回馈策略制定
引入制动电阻使整车能执行的回馈能力增加44.6 kW,即满电时由制动电阻释放功率44.6 kW,非满电下回馈能量优先由电池吸收,多余回馈能量由制动电阻释放。电池允许回馈功率P1由电池管理器BMS根据电池电荷量SOC值、电池状态实时计算得到[7],具体回馈策略如下:
整车控制器通过车速、制动踏板深度、电池状态信息等计算出车辆当前需要的总回馈功率P2,当电池禁止回馈电量时,回馈功率P2全部由制动电阻释放;当电池允许回馈电量时,若P2≤P1,总回馈功率P2全部由电池吸收储存;若P2>P1,则制动功率优先回馈给电池P1,多余的回馈功率由制动电阻释放,即制动电阻释放功率为P2-P1[8]。
2 试验验证
现有额定44.6 kW的制动电阻和电阻控制器,加装在某纯电动客车上做IIA型制动试验;另验证当车辆回馈功率减小时,制动电阻的释放功率P是否跟随回馈功率P2变化,使电阻工作时不额外损耗电池电量;及验证当电池允许回馈下,整车是否分配回馈功率。
2.1 IIA型制动试验验证
整车控制器设定车辆在车速为30 km/h,双电机执行的回馈扭矩322 N·m刚好满足车辆在斜坡上受力平衡的要求,试验时SOC值为100%,电池不允许回馈能量,用牵引车牵引车辆,模拟IIA型制动试验工况。
如表1和图2所示,车辆在外力的牵引下,车速稳定在30 km/h,持续执行制动回馈,回馈功率和制动电阻上释放的功率均约为44.6 kW,持续时间大于12 min(试验距离大于6 km),电机回馈扭矩与理论值相等,示波器测得母线无冲击电压、电池端无充电电流[9],满足IIA型试验要求,具备缓速制动性能。
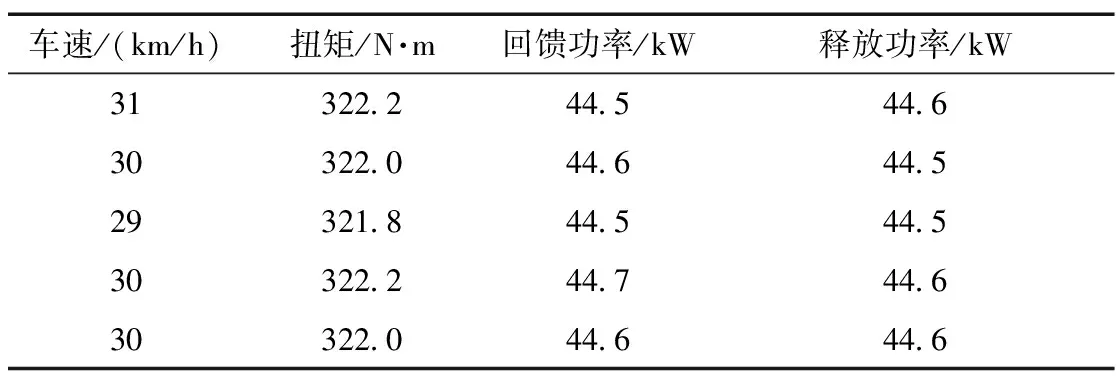
表1 车速、回馈扭矩和释放功率测试数据表
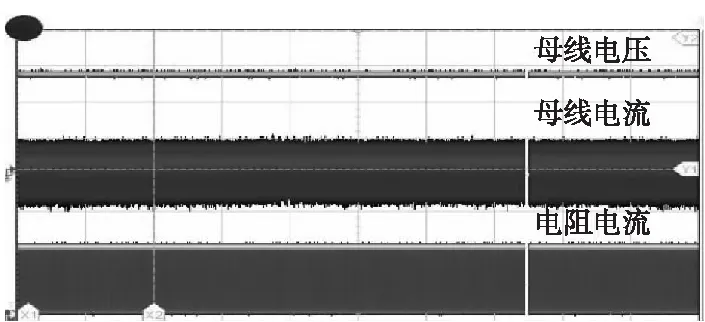
图2 母线电压、电阻电流、母线电流波形图
2.2 制动电阻释放功率跟随性验证
牵引车以25 km/h牵引车辆,然后将车速降至15 km/h,验证当回馈功率变化时制动电阻的释放功率P能否及时响应[9]。
如表2所示,在车速从25 km/h变化至15 km/h的过程中,回馈扭矩跟随车速变化,因此回馈功率P2也在变化。制动电阻的释放功率P与回馈功率P2保持一致,证明制动电阻控制跟随性良好,不会额外消耗电池电量。
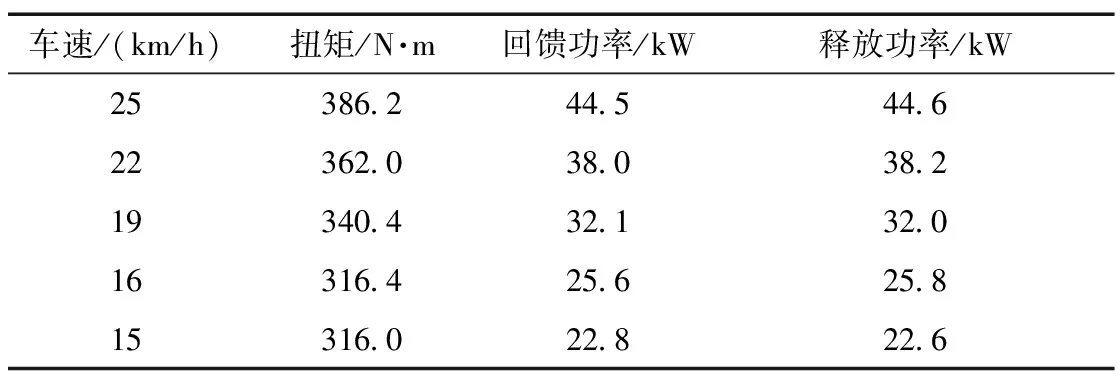
表2 车速、回馈扭矩和释放功率数据表
2.3 整车回馈功率分配试验
试验时SOC值为60%电池允许回馈(一般SOC≥95%时电池禁止回馈),车辆加速至55 km/h后,松油门,踩刹车。
如图3所示,车辆执行刹车回馈功率P2,当P1≥P2时,回馈能量全部由电池吸收;当P1 图3 分配回馈功率波形图 当制动电阻消耗回馈能量时,会大量发热,试验全程监测制动电阻的温度和出风口温度。 制动电阻持续工作中内部温度持续升高,经风扇冷却后温度趋于稳定,可持续工作;由于制动电阻工作发热量大,后续可开发水冷制动电阻,以提升散热性能。 引入制动电阻单元可以解决纯电动车满电不能回馈问题,使车辆在全SOC范围内都具有缓速制动性能,满足GB 12676—2014中IIA型制动试验(缓速制动性能)要求[10]。 在非试验条件,制动电阻也可以参与制动,提升整车在不同SOC下回馈制动的一致性,改善驾驶员驾驶感受,减轻机械制动负荷[11]。 电阻控制器响应整车控制器命令,可以实时、无极调节制动电阻上的泄放功率,接入回路中不会额外损耗电池电量且智能分配回馈功率。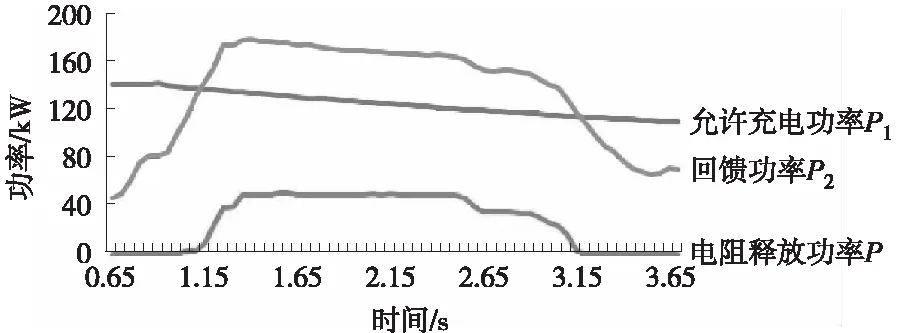
2.4 制动电阻温度测试
3 结束语
