增程式电动汽车动力参数选择及控制策略研究
2019-02-25聂立新刘同乐范小彬
聂立新, 刘同乐, 刘 涛, 范小彬
(河南理工大学, 河南 焦作 454150)
增程式电动汽车兼备混合动力汽车和纯电动汽车的优点,在最近几年越来越受到各方的关注[1]。目前对增程式电动汽车的研究主要集中在动力系统参数匹配与能量管理策略等方面[2-6]。本文在介绍增程式电动汽车动力系统参数选择的基础上,基于以往规则型控制策略研究成果,兼顾电池保护与燃油经济性,提出恒功率+最优曲线功率跟随控制策略+目标里程优化的解决方案,并进行仿真分析。
1 增程式电动汽车动力系统参数选择
增程式电动汽车的动力系统由动力电池系统、动力驱动系统、整车控制系统和辅助动力系统(增程器)组成[7]。其结构原理如图1所示,其中增程器由发动机、ISG电机组成,对外只有电能输出,不存在机械传动,特殊的结构决定了增程式电动汽车行驶主要有纯电池供电模式和增程器发电模式。
某增程式电动汽车基本性能参数要求如下:最高车速≥140 km/h;0~100 km/h加速时间≤14 s;最大爬坡度≥25%;纯电动行驶里程>80 km;总续驶里程≥400 km。

图1 增程式电动汽车动力系统示意图
根据以上需求,对增程式电动汽车动力系统进行设计。 驱动电机选择效率及比功率均较高的永磁同步电机。有关计算公式如下:
(1)
式中:nmax为电动机最高转速;Vmax为最高车速;i0为主减速器传动比;Pm,max为电动机峰值功率;Pm1,Pm2,Pm3分别为由最高车速、最大爬坡度及加速时间计算得到的最大需求功率,分别为30.7 kW、33.3 kW、56.6 kW。
增程器的ISG电机同样选择永磁同步电机,其标定输出功率参考发动机在最佳燃油点的输出功率。增程器的发动机采用可靠性高的直列四缸汽油机,其功率设计通常按照汽车最高车速所需功率来进行初步选择,并要求选择的发动机额定功率稍大于理论值,以满足附件功率消耗。通过发动机的燃油消耗MAP图及续驶里程要求,得到油箱容积V,公式如下:
V=SREfc/Va
(2)
式中:SRE为续驶里程;fc为发动机高效工作点处油耗;Va为行驶车速。
动力电池采用比能量及比功率高且充电性能优良的磷酸铁锂电池。其电池组容量不仅应满足增程式电动汽车纯电动续驶里程对能量的需求,还必须满足驱动电机的功率需求,其最大充放电功率应不小于驱动电机的峰值功率,主要计算公式如下:
(3)
(4)
(5)
式中:EB、CE分别为动力电池在能量需求下的能量值与容量值,经计算得EB≥17.1 kW,CE≥44.5 A·h;Sb为续驶里程;DOD为动力电池的放电深度,值为0.7;ηT为传动系统效率,值为0.95;ηm为电机效率,值为0.9;ηb为动力电池放电效率,值为0.95;ηa为汽车附件能量消耗比例系数,值为0.1;Um为动力电池端电压,值为384 V;Pb,max、Cp分别为动力电池在功率要求下的最大放电功率与容量值,经计算得Pb,max≥17.1 kW,Cp≥44.8 A·h;Pf为汽车附件功率,值为4.5 kW。
通过计算选择:磷酸铁锂电池组的单体个数为120,端电压为384 V,容量为46 A·h, SOC使用范围为30%~100%。驱动电机的峰值功率为62 kW,额定功率为31 kW,最高转速为7 000 r/min,额定转速为2 500 r/min,工作电压依据动力电池额定电压定为384 V。增程器发动机最大功率为43 kW,满足续驶里程所需的油箱容积为23 L;增程器ISG电机标定输出功率为23 kW,额定电压为384 V。
2 能量控制策略及仿真分析
2.1 常用能量控制策略
目前针对增程式电动汽车所提出的能量控制策略主要有:恒温器式控制策略[8]、功率跟随控制策略[9-10]、模糊逻辑控制策略[11]、动态规划控制策略[12]、全局最优控制策略[13]。其优缺点对比见表1。

表1 增程式电动汽车能量控制策略优缺点对比
2.2 改进策略:恒功率+曲线功率跟随控制策略+目标里程优化
以上的控制策略主要存在单一优化造成其他参数恶化,或者计算复杂难以实现等缺点,为此,本文采用简单规则型控制策略,主要从增程器启动时间及工作模式分析,在保护电池、保障动力的前提下,提出功率恒定输出与功率跟随输出相结合的控制策略,对目标里程优化控制,以达到提高燃油经济性的目的。
增程式电动汽车的发动机与地面负荷是解耦的,可在高效区独立工作,因此在相同里程及相同行驶工况条件下进一步减少发动机燃油消耗量是本文的目标。为此,本文从以下2种途径开展研究:一是减少发动机开启时间(包括频繁启动次数);二是提高发动机的燃油经济性。
以燃油经济性最好的恒温器控制策略为出发点,在这种模式中,发动机一直以最佳工况运转,提供恒定功率,在整车需求功率校小时,利用发动机的多余功率对电池进行充电,在整车需求功率超过发动机输出功率时,由动机电池放电对发动机输出功率进行补充。其缺点为:动力电池充放循环较多,且当需求功率变化很大时,动力电池的电流也会较大,对电池寿命造成不良影响。综合曲线功率跟随控制策略的优点则可以解决这一问题。
控制策略规则设计:当SOC>0.5时,动力电池放电性能较好,整车动力均由电池提供;当SOC<0.5时,动力电池端电压低于初始值,在相同功率输出时,放电电流增大,为限制最大放电电流,保护电池,通过整车需求功率与固定数值,即低电量电池允许放电功率进行比较,设置发动机触发控制。同理,电池SOC<0.3时,发动机启动。当发动机启动后,根据整车需求功率的大小,选择发动机工作模式:当整车需求功率大于发动机在最佳燃油经济点输出功率与低电池电量允许放电功率之和时,发动机将开启功率跟随模式,输出功率增大,满足整车动力性需求;当整车需求功率小于发动机在最佳燃油经济点输出功率与低电池电量允许放电功率之和时,发动机则工作在最佳燃油经济点以恒功率输出,多余电量用于动力电池充电;当电池充电至SOC>0.7或电池剩余可用电量可以提供足够能量,使电动汽车达到目的地,即可关闭发动机。为了保护电池,在增程模式下,当SOC<0.25时,电池停止功率输出,防止电池深度放电;在制动能回收时,对最大充电功率限制,防止大电流损坏电池。
2.3 仿真分析
本文选用前向仿真软件Cruise对整车进行建模仿真试验。建立整车仿真模型如图2所示。

图2 增程式电动汽车整车模型
1) 动力性与续驶里程仿真分析。通过建立Maximum Velocity、Full Load Acceleration 和 Climbing Performance 3项计算任务,对车辆的3大动力性能指标进行仿真分析,结果如图3和图4所示。

图3 最大加速度时速度随时间的变化曲线
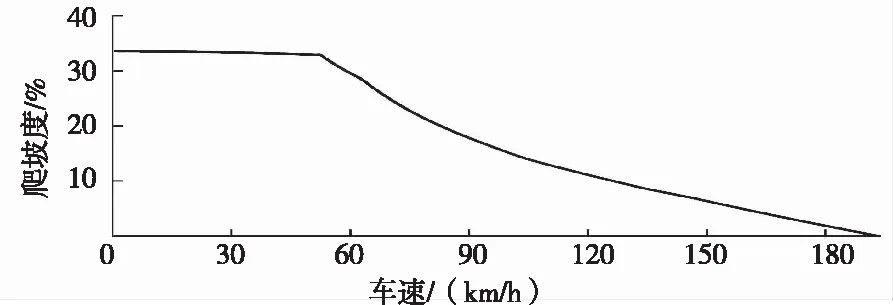
图4 爬坡性能
在仿真结果中得到整车仿真的最高车速为178 km/h、0~100 km/h加速时间为13.3 s,最大爬坡度为31.5%,均满足设计指标。同理,将动力电池初始SOC值设为0.9,分别进行NEDC工况和60 km/h等速工况的纯电仿真,其纯电续驶里程分别为92 km、123 km。
将动力电池的初始值设为30%,增程器从T=0时开始工作,分别进行NEDC工况和60 km/h等速工况的增程仿真,得到其增程模式的续驶里程分别为328 km和467 km。由此得出,纯电行驶里程与增程续驶里程均满足设计要求。
2) 经济性仿真分析。为了分析改良后控制策略的优化程度,设置增程器恒功率输出的对比试验。首先将动力电池初始值设为30%,在NEDC工况下,测试在不同控制策略下的油耗表现。结果表明,改良控制策略有效减少燃油消耗和电能的转化积累,其SOC值变化对比如图5所示。

图5 两种控制策略下的SOC变化对比
经过折算,采用恒功率控制策略的增程式电动汽车的百公里油耗为8.5 L/km,采用改良控制策略的增程式电动汽车百公里油耗为7.01 L/km,比之节油17.5%。
3 结 论
在满足增程式电动汽车整车性能,且保护电池的基础上,以提高整车燃油经济性为目的,提出恒功率+曲线功率跟随控制策略+目标里程优化的解决方案,通过Cruise仿真试验验证,相较于恒功率控制策略,整车燃油经济性得到了提高。
