三体无人救助艇设计与研发
2019-02-24王绪明宋学敏余向前刘维勤
王绪明, 宋学敏, 余向前, 刘维勤, 黄 珍, 丁 凯
(武汉理工大学 1a.国家水运安全工程技术研究中心;1b.高性能船舶技术教育部重点实验室; 1c.自动化学院,武汉 430063;2.国网湖北省电力有限公司 电力科学研究院, 武汉 430077)
随着国际贸易往来的增加,海上船舶日益增多,海事事故频发,通常遇难、遇险时伴随着恶劣的海洋环境。有人巡航救助平台建设具有投资大、布点少及航速低的缺点,在恶劣海况下的安全救助和有效作业难以保证,较低的航速也会失去第一救援时间。高精度导航、智能化与无人驾驶高速船可满足各种海况下的出航率和航行精准度;高精度导航可保障事发地点救助的准确性和有效性;无人驾驶高速船可确保救助的时效性,实现第一时间救助。因此,智能巡航救助船可显著提升中国海事、中国渔政和交通运输部中国海上搜救中心等海上救助部门的搜救能力。人工智能技术的持续创新和应用以及船舶的无人化、智能化必将成为水运行业的发展方向。[1]武汉理工大学智能交通系统研究中心研发一种具有自主智能避碰巡航、海事救助功能的三体无人艇。
目前,国内海上救助任务仍需大量的专业搜救人员参与,相关救助设备也都需要人工操作。在高海况下,搜寻遇险人员难,援救遇险人员更难。高海况下无人艇(Unmanned Surface Vessel,USV)的性能、姿态控制和自动化救援设备的研制等问题成为阻碍海上无人救援设备发展的关键技术难点。因此,我国亟需进行智能无人驾驶救助艇的前瞻性技术探索和研究。
1 无人驾驶巡航救助艇的船型设计
1.1 基于耐波性的船型论证
针对高海况条件下的无人驾驶巡航救助艇船型的耐波性能进行论证,优选出满足无人驾驶巡航救助艇作业需求的船型。
选取单体船、双体船及三体船等3类船型为研究对象,通过数值方法进行不同频率、不同浪向规则波象的船舶运动响应预报并根据预报结果进行不同浪向规则波和不规则波国际拖曳水池会议(International Towing Tank Conference,ITTC)波浪谱条件下的船舶运动模拟。[2]为保证对比论证的合理性,各船型模型均采用折角船型,且单体船、双体船片体、三体船主体与片体的船型均通过船型的仿射变换得到。单体船、双体船和三体船的数值模型见图1~图3。不规则波中横浪时单体船、双体船和三体船的升沉运动时历曲线见图4。其中,不规则波中的船模耐波性预报,根据相关标准,采用ITTC双参数波浪谱,其极限海况的波浪参数为:波高15.85 m,平均周期14.7 s。
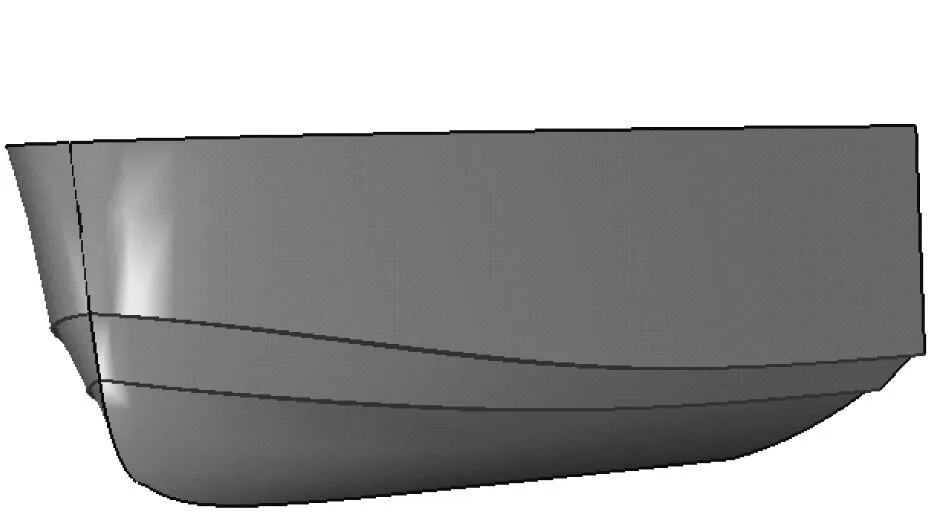
图1 单体船型模型
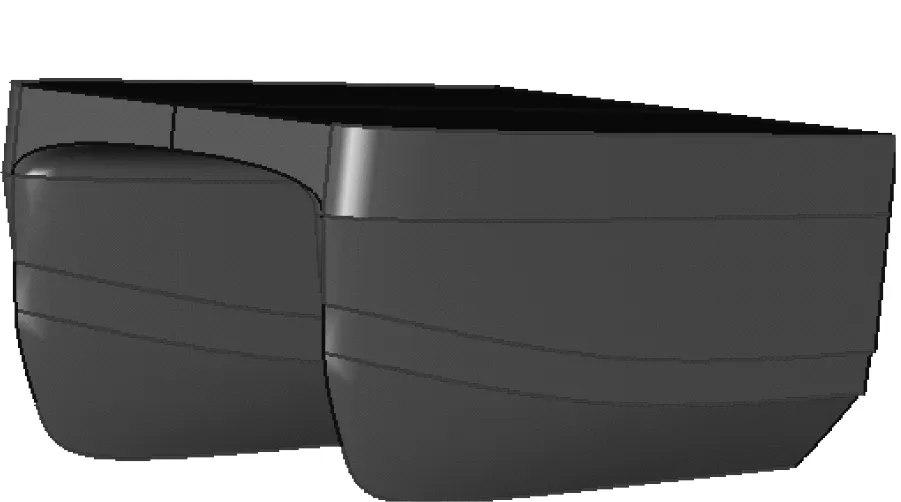
图2 双体船型模型
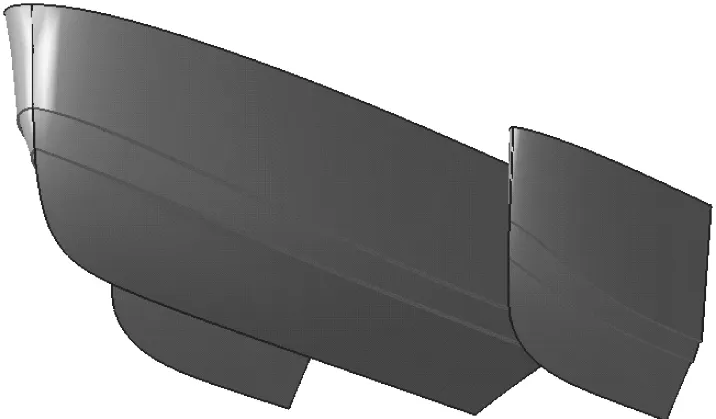
图3 三体船型模型
影响无人驾驶巡航救助艇安全性的主要因素为横摇,其次为纵摇,而过大的升沉运动可能会导致船体跃出水面或在跌落时受到较大的砰击载荷。
1) 选择船型时,先分析横摇运动响应:迎浪或随浪时3种船型均无横摇;横浪时单体船的横摇角度明显高于其他两种船型,三体船则略高于双体船;斜浪时双体船的横摇情况明显恶化,甚至部分时刻的幅值高于单体船,而三体船明显低于其他两种船型。
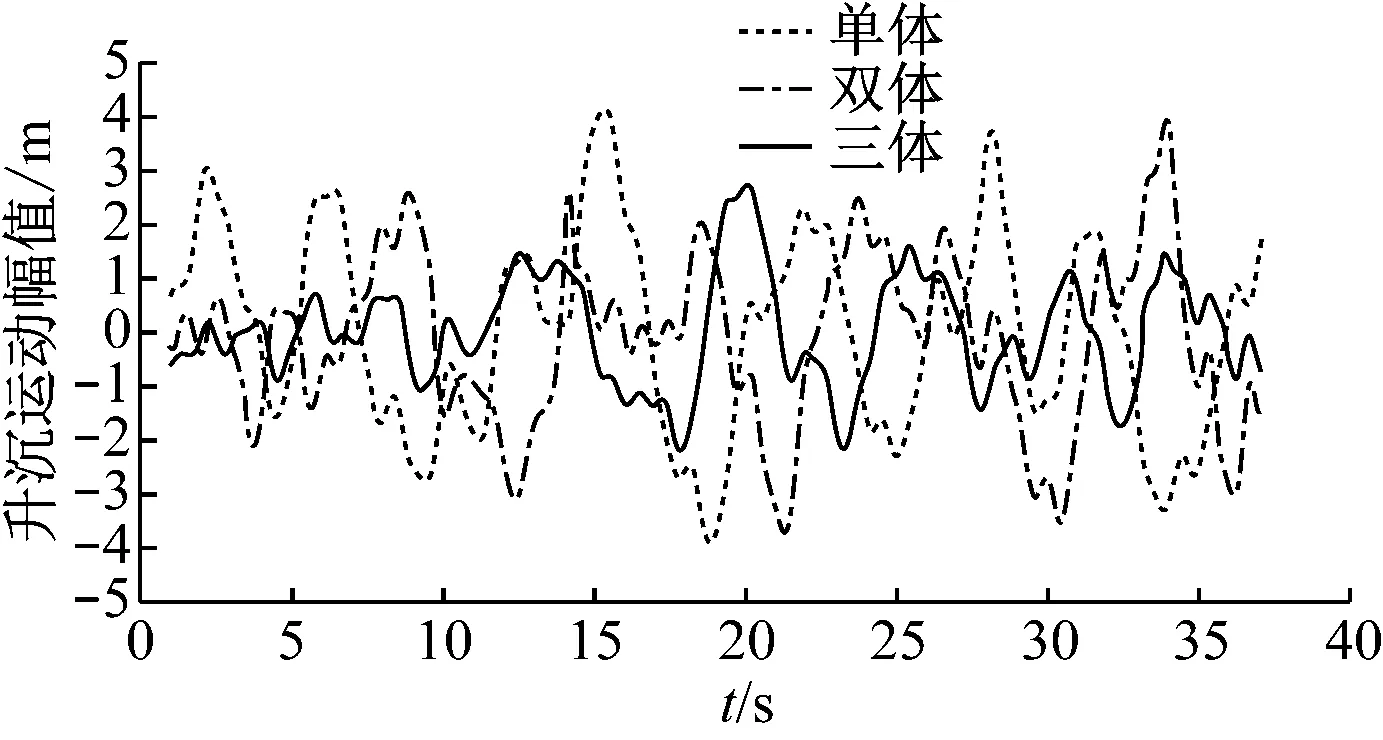
图4 不规则波中各船型横浪升沉运动时历曲线
2) 分析纵摇运动响应:横浪时3种船型中双体船的幅值略高,其他两种船型相对略低且差别不明显;斜浪时双体船的纵摇运动幅值明显高于其他两种船型。
3) 考虑升沉运动响应分析,横浪时单体船的升沉运动最大,斜浪时双体船的运动响应最大。
因此,可得到以下结论:
(1) 单体船在横浪与斜浪中的横摇运动幅值较大,不适合作为无人驾驶巡航救助艇的船型;
(2) 双体船在斜浪中耐波性能急剧恶化,往往出现跃出水面又跌回水中的现象,导致船体砰击压力较大,也不适合作为无人驾驶巡航救助艇的船型;
(3) 对于三体船而言,少部分工况的运动响应略高于单体和双体船型,但不显著。在大部分工况中,三体船型的耐波性能明显更好。
1.2 三体船的拖曳试验
三体船相对常规单体船、双体船是一种新船型。[3-5]三体船的设计兼具快速性、低消耗、适航性和良好的操纵性的优点。无人驾驶巡航救助艇采用的船体型线具有其特殊性,融合常规高速船、三体船、USV和游艇的相关设计理念与成功经验是为无人驾驶巡航救助艇定制的新船型。
为探索和观测船舶高速运行时三体船的阻力情况,设计并制作缩尺比船模,与中国特种飞行器研究所进行船模的拖曳试验,观测无人驾驶巡航救助艇在海上高速航行的状态。变换组合三体船两片体和主体的相对位置,测量得到各工况下模型船的阻力性能、纵倾角和升沉等参数,找出阻力性能最优的主/片体相对位置,为船舶的型线设计优化提供指导与参考依据。
综合考虑水池的宽度等因素,选取实船和模型船缩尺比为1∶4,实际船和模型船的主尺度参数见表1。试验模型船舶在水动力试验室加工、材料木质、模型船表面经打磨光滑、喷漆处理,通过检验符合“一般排水量船模阻力试验规程和结果的标准表达形式(CB*/Z 244—1988)”中的允差标准。为考虑两片体和柱体布置位置对船体的阻力性能、纵倾角等的影响,选取21个典型工况,进行拖曳试验。各工况主片体布置详情见表2,其中:纵向-225是指片体在主体后225 mm位置;横向600是指片体中纵剖面与主体中纵剖面相距600 mm,以此类推。
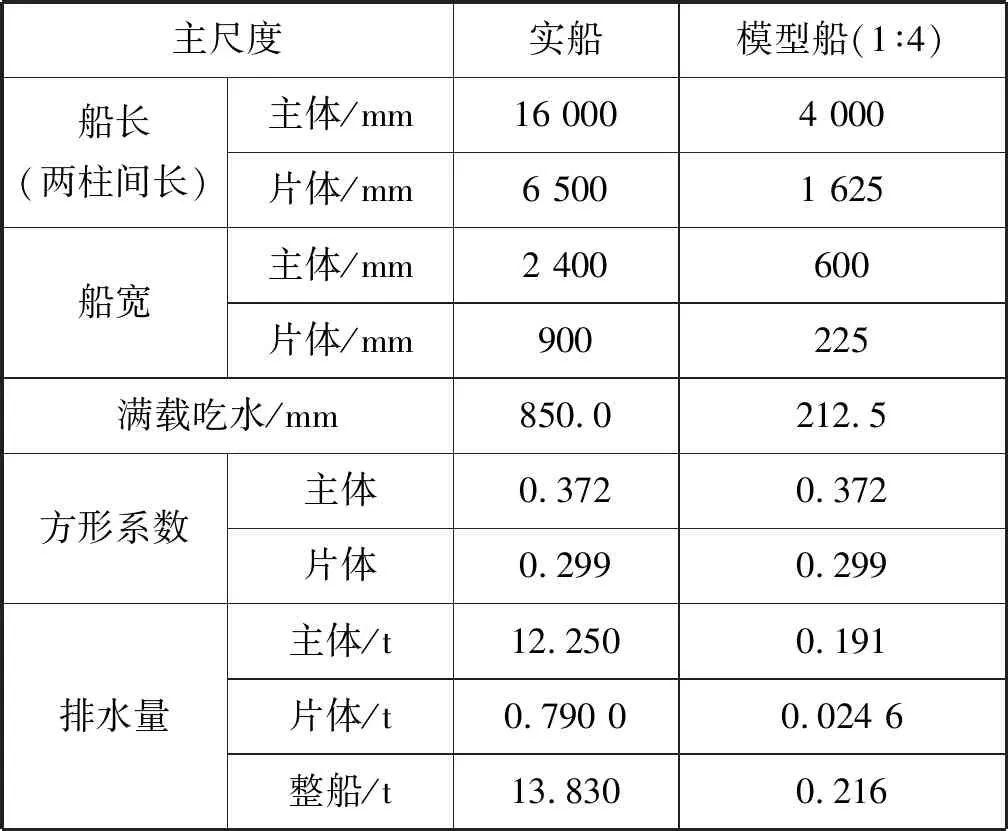
表1 实船与船模的主尺度参数
本试验主要分为两个阶段:
1) 通过主体设计载荷试验时的兴波情况,找出两片体相对于主体的位置。
2) 通过模型船舶试验测得三体船两片体的6个相对布置位置,每个布置位置3种排水量的阻力、航行姿态角以及升沉。船模的阻力随着拖曳速度的增大逐渐增大,见图5。当船速达到10 kn/s时,船舶的纵倾角度达到最大值,见图6。船模的升沉运动随着拖曳速度的增加而增加,见图7。
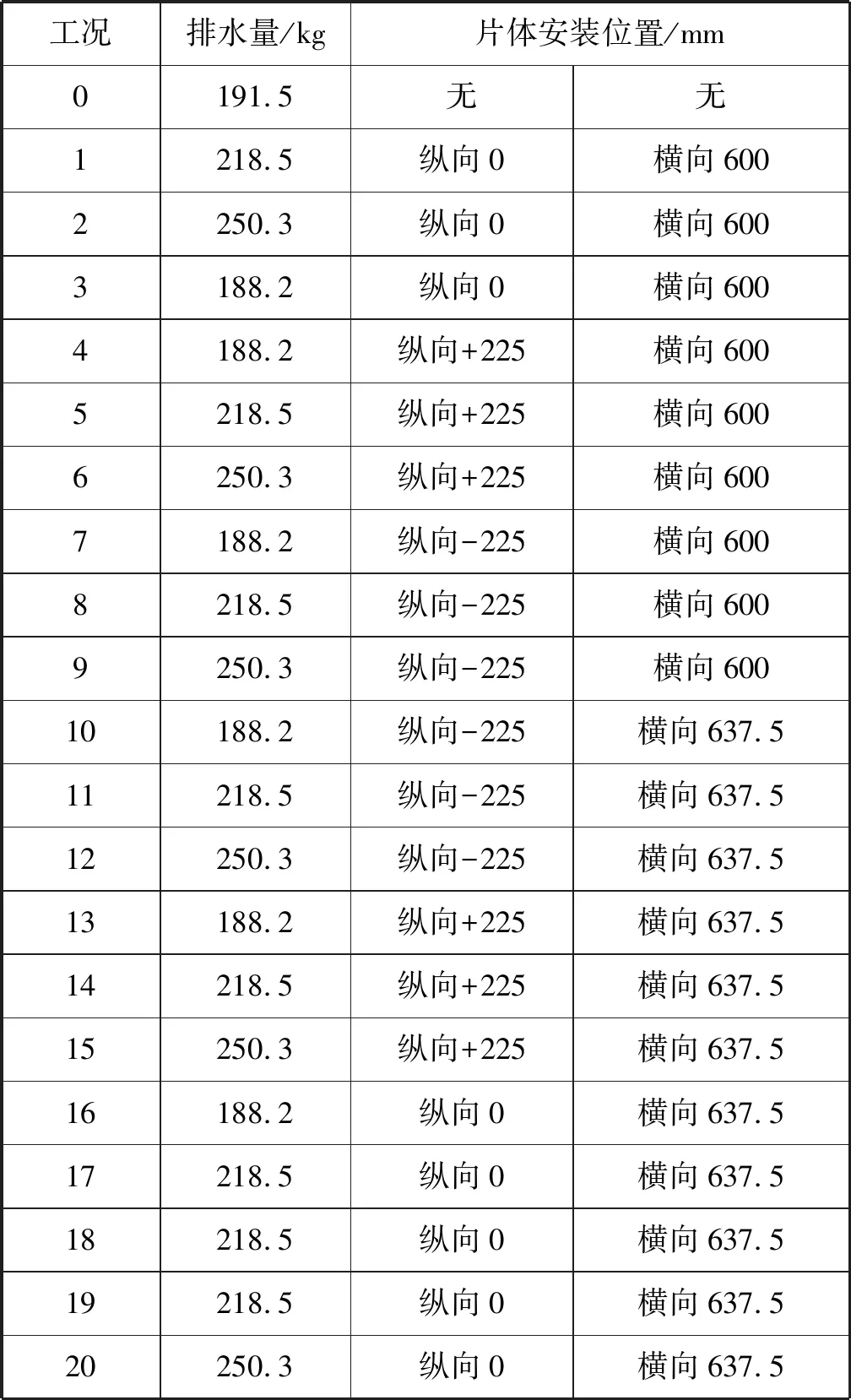
表2 试验工况表
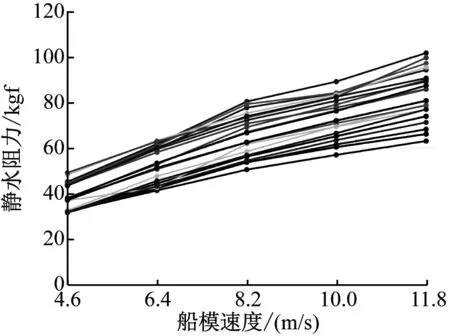
图5 各工况静水阻力曲线
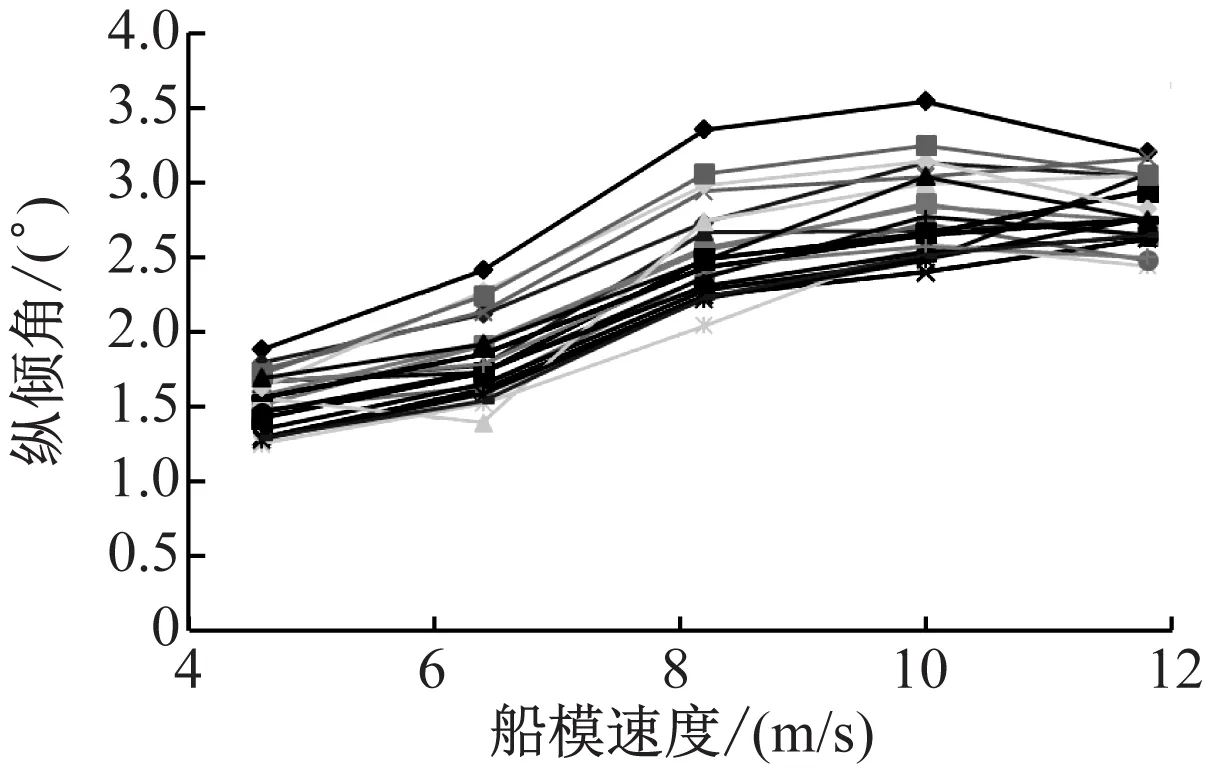
图6 各工况纵倾曲线
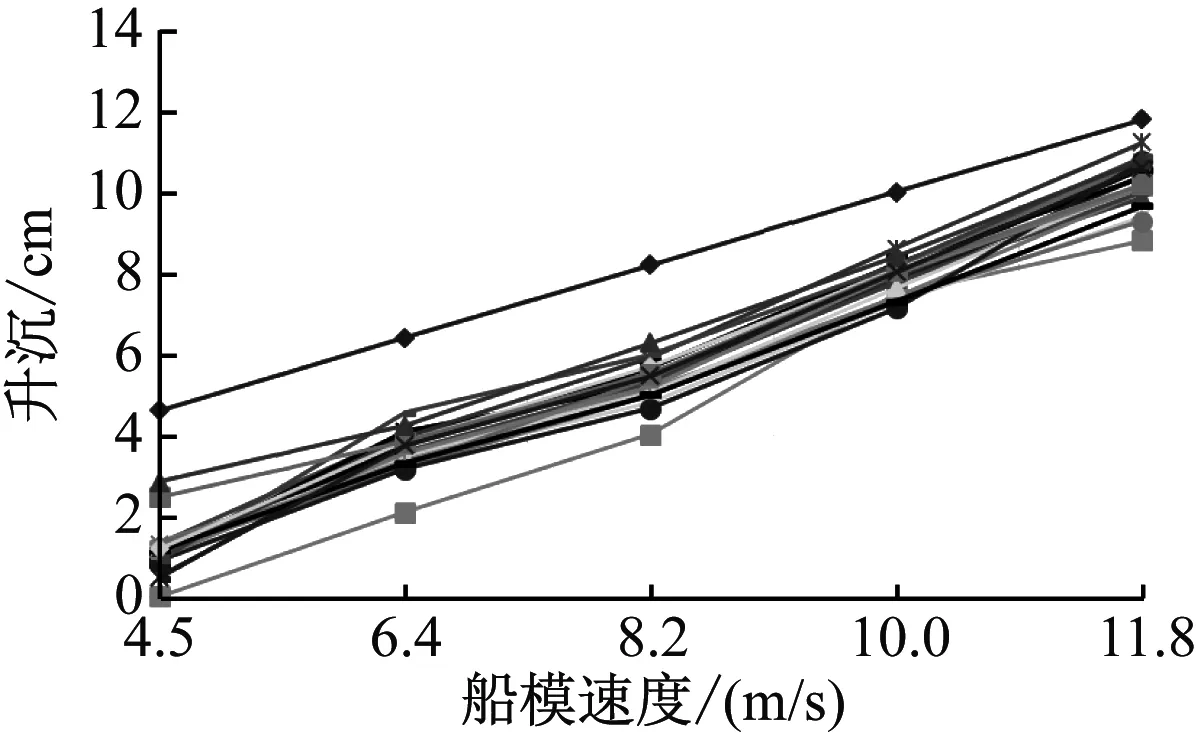
图7 各工况升沉曲线
观察试验所得阻力、航行姿态角以及升沉曲线可知,各工况下片体位置前置时的阻力比其他各工况都小。由于此三体艏部尖廋使船舶的浮心靠后,综合考虑船舶浮心和重心位置,选择片体中后置方案。
1.3 总布置设计
三体无人巡航救助艇相对于常规船舶,其总布置特殊性体现在其操作方式上——无人驾驶、环境感知、智能控制。机舱和自动控制设备需成为一个相对独立的封闭空间,既要保证各种设备的正常运转,又要避免被救起人员误入机舱,造成机器或人员损害。此外其最大的特殊性体现在船舶功能上——救助艇,要求船舶根据不同的救助方式选取相应的救助手段和设备,船舶的一切设计要以伤员的救助和安置为首要考量,对三体无人救助艇的总布置提出更高的要求。
三体无人高速巡航搜救船的总布置,主要从整体外观、系统效能和增长潜力等3方面入手。根据三体无人高速巡航搜救船的自身特点,对其总布置进行总体设计。
1.3.1整体外观
船舶的总布置设计不可避免地要考虑到外观设计。外形设计的优劣、是否具有美感以及其易用性等是需要综合考虑的因素。USV是复杂的水上建筑,其外观是否具有现代气息,如何体现我国现代化水平,也是总布置设计时需要考虑的一项指标。
1.3.2系统效能
为有效地完成预设任务,总布置必须完备。充分利用有限的空间,保证技术的水平发挥和良好的居住性,确保人员得到良好的休息以实现救援任务:离开母船;行驶至救援点;搜索并开展救援任务;搭载伤员返航。这整个救助任务顺利完成。
1.3.3增长潜力
增长潜力是指随着新技术更新速度的加快。为有效地实行海上救助任务,三体无人救助船很可能面临各种各样的救援环境,或者进行一些非救助性质的特殊任务,包括海洋勘探、气候侦测、海上巡逻等。
通过以上各个方面的综合考量,最终确定三体无人救助艇总布置图见图8,实船见图9。

图8 三体无人救助艇总布置图图9 三体无人救助艇实船
2 无人艇智能控制平台
2.1 “航行脑”系统
“航行脑”系统是服务于三体无人救助艇的智能平台,由感知、认知、决策和执行等功能空间组成。在无人救助艇航行过程中,由于外部环境的不确定性和本身运行状态的时变性,驾驶行为谱具有多样性的特点。不同水域条件和管制要求,船舶的避让、航行规则都有较大的变化。机器学习是解决无人救助艇行为描述与建模的有效工具。然而,传统的机器学习方法需要大量的训练样本;对于船舶的驾驶行为尤其在复杂、危险场景下,由于可采集到的样本量较少,无法保证学习过程的有效性。因此,使用稀疏矩阵、稀疏编码等方法,提出基于小样本量且适合船舶驾驶行为理解的机器学习方法,增强“航行脑”系统的认知、学习能力,建立驾驶行为谱的描述机制。
2.2 智能通信网关系统
现有的单一网络服务不能完全满足USV通信网络多样性和个性化的需求。因此,本研究采用多种无线通信技术的融合解决单一网络无法实现的功能,异构融合通信网络的研究是当前通信领域研究的重点。本船舶设计采用基于图传电台、4G/5G路由服务器和海事卫星通信等多种通信方式构建多模态无线通信网络见图10。测控地面站主要通过图传电台、4G/5G路由服务器、卫星通信等无线链路接收无人艇平台的位置、姿态、运动状态、工作状态等实时数据并实现对其远程遥控。

图10 无人驾驶多功能海事船艇多模异构通信 网络结构示意
3 海上人员救助系统
3.1 海上自主巡航系统
无人救助艇常态巡航是根据目标水域环境规划航行的。“航行脑”实时送出无人艇航向、航速指令,按照预规划航线匀速巡航,在航行过程中实时收集周围障碍物信息和海上其他船舶的位置、航速信息,同时实现自主避碰和海上巡航监督。[6-8]
无人救助艇在搜救巡航时,有区分目的地航行和搜救水域航行两种模式。目的地航行是在保持航向精确性和续航性,航向改变的决策是机动性和安全条件下的转向快速性。搜救水域航行是在给定的搜救水域内分区巡航,搜救装备识别、锁定目标为优先航行指令。自主航行系统框图见图11。无人救助艇自主航行执行过程如下:

图11 自主航行系统框图
1) 母船(或岸基)通过远程通信将目的地位置信息发送给无人救助艇,通过航线规划模块以最优路径原则规划设计出航线节点和航向转向点。
2) 实时采集位置信息,航向控制器模块根据给定航向与当前航向进行比较,计算出当前航向偏差,采用比例-微分-积分(Proportional Integral Differential,PID)控制算法得出合适的喷射角度,传输给喷水推进系统控制器。
3) 实时采集船速信息,航速控制器模块根据给定船速与当前船速进行比较,计算出合适的推进器转速,输出给喷水推进系统控制器。
4) 实时采集超前探测仪、雷达等传感器信息,将得到的动、静态障碍物距离方位信息发送到自主避碰模块,运用智能避碰算法输出给定船速和给定航向,分别传输给对应给定航向处理模块和给定航速控制器模块。
3.2 冷热红外光电跟踪系统
光电跟踪系统为冷热红外探测仪,集成全方位/俯仰云台的成像仪,能提供360°全方位有效搜索水域范围内的遇险人员信息。一旦搜索识别出水上人员信息,采用多目标手法加以锁定,同时警示母船(或岸基)比对确认。探测仪与无人救助艇的救助装置控制系统相连接,由母船(或岸基)发出自动释放、遥控释放救助装置的指令,实施相应方式的救助。
3.3 海上人员救助系统
针对无人救助艇的自动救援设备种类相对匮乏的问题,设计一套柔性空投式救生筏自动投射装置侧视图见图12,包含布置在无人救助艇上的压缩空气储气罐和释放装置,柔性空投式救生筏以及抛射装置。当无人救助艇到达救援目标区域附近时,利用高压储气罐释放出的高压气体,经导气管路进入抛射筒内的增压气腔中,当高压气体达到额定气压时,压力开关阀释放高压气体,将柔性空投式救生筏抛出。柔性空投式救生筏落水后自动展开,搭救落水人员,筏索与无人救助艇相连。
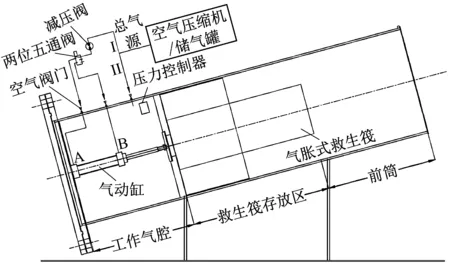
图12 气胀救生筏投射装置侧视图
4 结束语
本文论述小型三体无人救助艇船型选择比较的方法,获得优良的主片体相对位置布置及船舶型线,总体优化设计三体无人救助艇的总布置。研发三体无人救助艇的“航行脑”系统智能控制平台、智能通信网关、智能自主航行系统、遇险人员救助装置,利用冷热红外光电跟踪系统,实现遇险人员的救助。通过多学科的融合,集成无人救助艇相关专业的研究成果,完成三体无人救助艇的设计和系统研发工作。当然,USV的研究工作尚需拓展、深入,如母船(或岸基)之间不间断、无延时的远程通信保障,系统的高可靠性,网络的安全保证,USV的适航性、自健康、自回收、长生存能力等。
