马齿形玉米种子尖端激光定向与胚面识别装置研制
2019-02-23邢洁洁徐丽明袁全春
邢洁洁,徐丽明,马 帅,袁全春,陈 晨,曾 鉴,牛 丛
马齿形玉米种子尖端激光定向与胚面识别装置研制
邢洁洁,徐丽明※,马 帅,袁全春,陈 晨,曾 鉴,牛 丛
(中国农业大学工学院,北京 100083)
为了实现玉米种子的尖端定向与胚面识别,该文以现有尖端定向装置输出的马齿型玉米种子为对象,基于激光开关和测距原理,提出了一种尖端定向与胚面识别方法:依据马齿形玉米种子尖端窄大头宽的轮廓特征,利用激光开关传感器等部件对玉米种子的尖端朝向进行识别,并将大头朝前的玉米种子进行剔除;依据马齿形玉米种子胚面上有胚沟而反面较为平整的表面特征,利用激光测距传感器等部件对尖端朝前的玉米种子进行胚面识别。设计并搭建了玉米种子尖端定向与胚面识别装置,配合现有的尖端定向装置进行试验,结果表明:尖端定向与胚面识别装置的尖端定向成功率达到99.1%,相比现有的尖端定向装置提升了9.5个百分点,胚面识别准确率为96.4%。该方法基本可以实现玉米种子的尖端定向,同时保证胚面识别准确率达到较高水准。该文提出的玉米种子尖端定向与胚面识别方法可为后续玉米种子的自动化定向包装提供参考。
机械化;种子;设计;玉米种子尖端定向;胚面识别;激光传感器
0 引 言
玉米定向播种可以使玉米植株在生长过程中叶子展开方向一致,改善作物在田间的光照和通风情况,能够有效地提高玉米单产,并提高玉米机械化收获水平[1-6]。对于玉米机械化定向播种,国外相关研究较少,国内现有的玉米机械化定向播种方法主要是利用相关机具铺放玉米定向种子带[7-8]或插播定向玉米种子子弹[9-10],但需要事先制作定向玉米种子带或定向玉米种子弹夹,制作定向玉米种子带或定向玉米种子弹夹都属于对玉米种子进行自动化定向包装,自动化定向包装在室内完成即可。对于玉米种子的自动化定向包装,其关键前提是对玉米种子进行尖端定向和胚面识别。
目前,针对玉米种子定向播种技术的研究都是以马齿型玉米种子为基础的。关于尖端定向,本研究团队在文献[11-13]中提出了多种简易可行的尖端定向方法并设计了相关的定向装置,能够对马齿型玉米种子的尖端朝向进行定向,使大部分种子变为尖端朝前的状态,并以平躺或侧立的姿态输出,但其尖端定向成功率最高只能达到92%,即这些装置对玉米种子的尖端定向是不完全的,仍存在少数(约10%)的玉米种子尖端定向失败(保持大头朝前)。关于胚面识别,现有的研究主要是基于机器视觉技术或高光谱成像技术[14-22],例如张俊雄等[14]采用一种基于B通道平均像素值的胚部特征提取方法,提取了具有Navajo标记的玉米种子胚部图像,并在RGB颜色空间内提取了样本的Navajo标记图像,从而得到一套玉米单倍体种子快速识别 RGB 组合算法,识别正确率达到94%以上;王侨等[15-18]通过对马齿型玉米种子图像的每个像素进行G-B、大津法二值化、二值图像差分等处理后获得种粒白色胚区域和长轴线,然后通过计算长轴上白色胚像素占比,最终实现对玉米种粒正反面的判断,识别正确率达到98%;Huang Wenqian等[19]搭建了一套高光谱成像系统用于获取波段范围为500~900 nm的高光谱反射图像,研究发现采用可见光区域的3个有效波长510、555和575 nm获得的主成分图像对玉米种子的胚具有较好的识别效果,识别率可达97%。但基于机器视觉技术或高光谱成像技术的胚面识别方法对作业环境要求很高,例如图像采集时需要特定的黑色封闭空间,另外机器视觉和高光谱成像平台成本较高,实用性较差。
结合玉米种子自动化定向包装的实际需求,对玉米种子进行尖端定向时,要求尖端定向成功率达到100%(即全部实现尖端定向),同时要求胚面识别准确率达到较高水准,另外结合农业生产和推广的实际需求,用于实现玉米种子尖端定向和胚面识别的方法与装置应对作业环境要求较低,且生产成本较低。综上可知,现有的尖端定向方法和胚面识别方法难以满足实际需求。
本文以现有尖端定向装置[11]输出的尖端定向不完全、呈平躺姿态的马齿型玉米种子为对象,基于激光开关和测距原理提出一种尖端定向与胚面识别方法:依据马齿形玉米种子自身的外形特征,利用激光开关传感器、激光测距传感器等部件,先将少数大头朝前的玉米种子全部剔除,完成尖端定向,然后对尖端朝前的玉米种子进行胚面识别,最后输出。设计并搭建试验装置对该方法进行性能验证试验,以期为后续玉米种子的自动化定向包装提供参考。
1 玉米种子尖端定向与胚面识别原理
1.1 玉米种子尖端定向原理
尖端定向就是使玉米种子的尖端全部朝前。本研究的工作对象中,约90%的玉米种子是尖端朝前的,所以只需要识别出少数大头朝前的玉米种子并进行剔除,即可实现尖端定向。本研究提出的尖端定向方法主要基于马齿型玉米种子的轮廓特征和激光开关传感器。
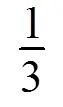
玉米种子尖端定向过程如图2所示,参考马齿型玉米种子的轮廓特征,设计一个“V”形种槽,尖端朝前的玉米种子可以进入到种槽内,而大头朝前的玉米种子则会堵住种槽入口因而无法进入到种槽内,基于这个差别,配合常开型激光开关传感器、特定的直线轨道和推杆(图2a)对玉米种子的尖端朝向进行识别,并将大头朝前的玉米种子进行剔除。图2中的种槽和直线轨道为理论模型。直线轨道水平摆放,种槽设置在轨道出口端的中央,但不与轨道内壁相接触,常开型激光开关传感器设置在种槽后方、缺口1侧面,激光开关传感器发射的激光束与轨道侧面垂直,可经缺口1和缺口2贯穿轨道。为直线轨道添加适当的电磁振动,设定垂直振幅不超过0.1 mm,防止玉米种子在轨道中发生跳动。设定直线轨道内宽略大于玉米种子的最大宽度,而小于玉米种子的最小长度,使呈平躺姿态的马齿型玉米种子在轨道中只能以尖端朝前或大头朝前的状态在轨道中做前进运动。

1. 尖端 2. 大头 3. 轮廓线 4. 胚部 5. 胚沟 6. 平面
1. Tip 2. Large head 3. Contour line 4. Embryo region 5. Embryo groove 6. Plane
注:和分别为玉米种子的长度和宽度,mm;和分别为胚沟的长度和宽度,mm;为胚沟深度,mm。
Note:andare the length and width of corn seeds respectively, mm;andare the length and width of embryo groove respectively, mm;is the depth of embryo groove, mm.
图1 马齿型玉米种子外形
Fig.1 Shape of dent corn seed
1. 直线轨道 2. 缺口1 3. 缺口2 4. 激光束 5. 缺口3 6. 种槽 7. 出口端8. 推杆 9. 激光开关传感器 10. 玉米种子前进方向 11. 玉米种子 12. 入口端
玉米种子尖端朝前时的识别过程见图2b,0时刻玉米种子尖端挡住激光束,激光开关传感器由断开变为触发;1时刻玉米种子顺利进入到种槽内,种子两侧与种槽内壁相贴合,尖端与种槽顶点比较接近,此时玉米种子不再遮挡激光束,激光开关传感器重新断开。整个过程中激光开关传感器的感应状态为:断开-触发-断开,触发状态的持续时间为(1-0),持续时间较短。玉米种子大头朝前时的识别过程见图2c,¢0时刻玉米种子大头挡住激光束,激光开关传感器由断开变为触发;1¢时刻玉米种子到达种槽处,但因大头堵住了种槽入口玉米种子无法进入到种槽内,会一直遮挡激光束,激光开关传感器持续保持触发。整个过程中激光开关传感器的感应状态为:断开-保持触发。
对于尖端朝前和大头朝前2种状态的玉米种子,激光开关传感器表现出2种不同的感应状态,据此可对玉米种子的尖端朝向进行识别,并根据识别结果控制推杆在2¢时刻作推送运动,将大头朝前的玉米种子由缺口2推出轨道完成剔除。
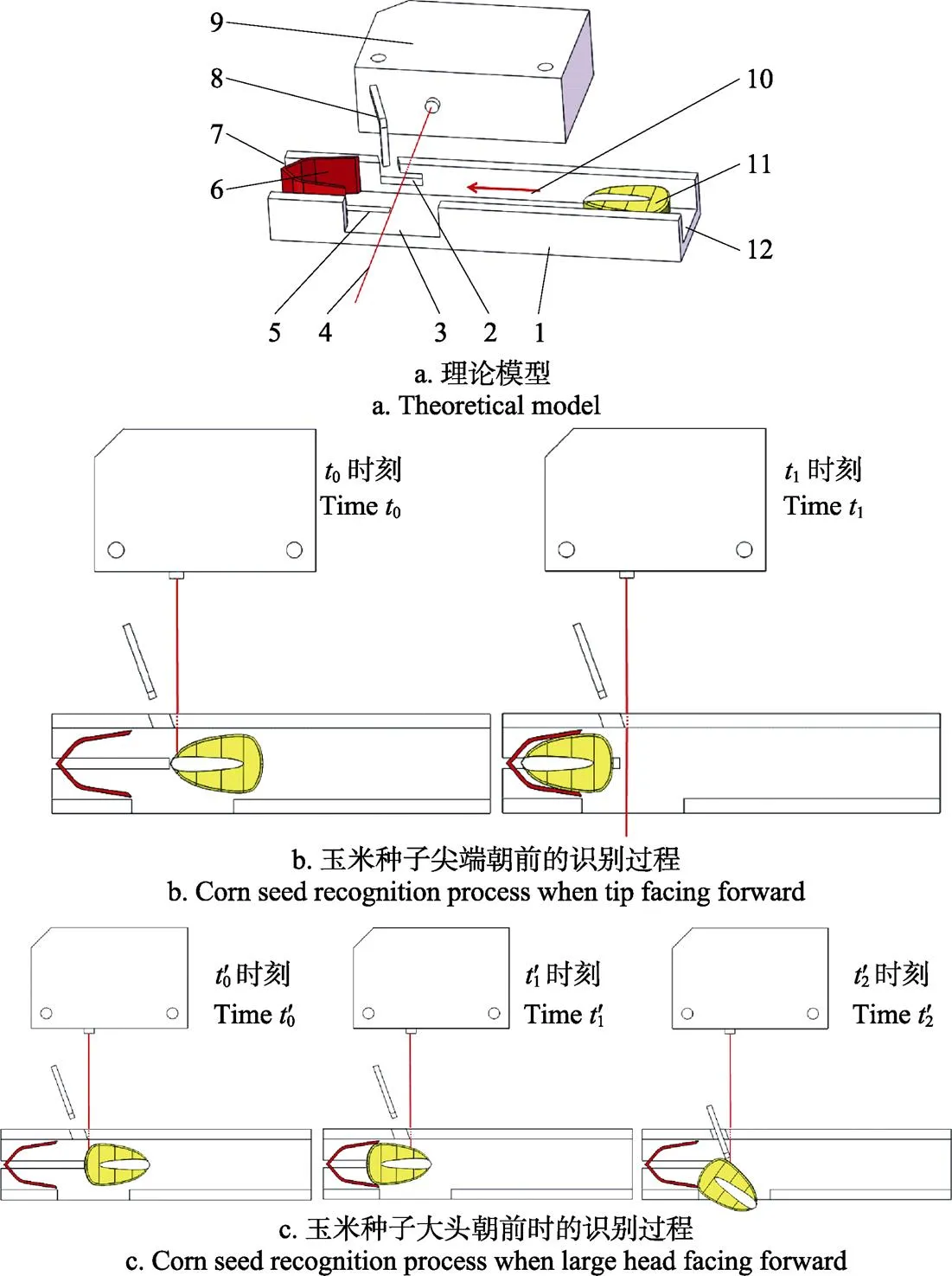
在水平方向上激光开关传感器与种槽之间的前后相对位置十分关键,会直接影响到对玉米种子尖端朝向的识别效果。激光开关传感器的移动范围如图3所示,依据玉米种子的轮廓得到前后2条临界线(前临界线和后临界线),激光束只有处于2条临界线之间才能保证出现上述差别,2条临界线距种槽顶点的距离分别为1和2,差值(2-1)即为激光开关传感器可移动的范围,该范围将在装置设计时经测量得到。
1. 尖端朝前的玉米种子 2. 大头朝前的玉米种子 3. 前临界线4. 后临界线
1.corn seed with tip facing forward 2.corn seed with large head facing forward 3. Front critical line4. Back critical line
注:1和2分别为前临界线和后临界线距种槽顶点的距离,mm。
Note:1and2are the distance between the tip of seed slot and front critical line, back critical linerespectively, mm.
图3 激光开关传感器的移动范围
Fig.3 Moving range of laser switch sensor
1.2 玉米种子胚面识别原理
尖端定向完成之后,即可对玉米种子的胚面朝向进行识别。本研究提出的胚面识别方法主要基于马齿型玉米种子的表面特征和激光测距传感器。
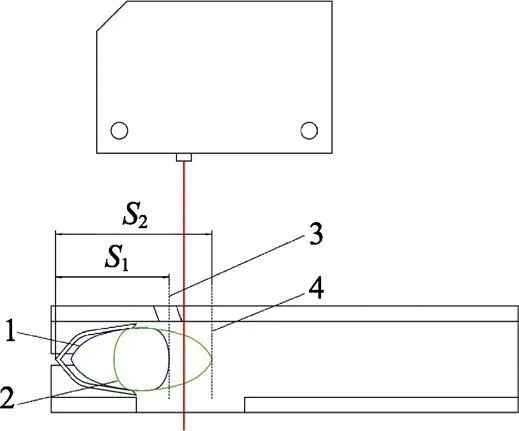
胚面识别原理如图4所示,玉米种子胚面上有胚沟,而反面为平面,基于这个差别,配合高精度激光测距传感器、直线轨道和种槽(图4a)即可对玉米种子的胚面朝向进行识别。尖端朝前的玉米种子停留在种槽中,胚面朝下或反面朝下。缺口3正下方设置有一个高精度激光测距传感器,激光测距传感器发射的激光束与轨道底面垂直,由缺口3贯穿轨道底面,为了使表达更加明确,图4b和图4c采用剖视图,剖面为直线轨道2个侧面的对称中心面,激光束正好在该剖面上。
玉米种子胚面朝上时的识别状态见图4b,种子的反面与直线轨道内底面接触,激光测距传感器的检测光束落在反面上,检测距离为1,理论上,该值等于激光测距传感器激光发射点到直线轨道内侧底面的距离;玉米种子胚面朝下时的识别状态见图4c,种子的胚面与直线轨道内底面接触,在种槽的定位作用下,胚沟对准下面的缺口3,激光测距传感器的检测光束正好落在胚沟内,检测距离为2。由于胚沟具有一定深度,所以2会大于1,二者的差值(2-1)即为胚沟的深度。
对于胚面朝上和胚面朝下2种状态的玉米种子,激光测距传感器检测出2种不同的距离,据此可对玉米种子的胚面朝向进行识别。由于设定的直线轨道电磁振动垂直振幅小于0.1 mm,而胚沟的最大深度大于0.6 mm,所以直线轨道的振动对胚面识别干扰作用很小。
在水平方向上激光测距传感器与种槽之间的前后相对位置也十分关键,会直接影响到对玉米种子胚面朝向的识别效果,参考图1c,在胚沟的长轴线上距尖端/3和2/3处作2条临界线(前临界线和后临界线),如图4b和4c,识别胚面朝向时,要求激光测距传感器的激光束处于2条临界线之间。2条临界线距种槽顶点的距离分别为3和4,差值(4-3)即为激光测距传感器可移动的范围,该范围将在装置设计时经测量得到。
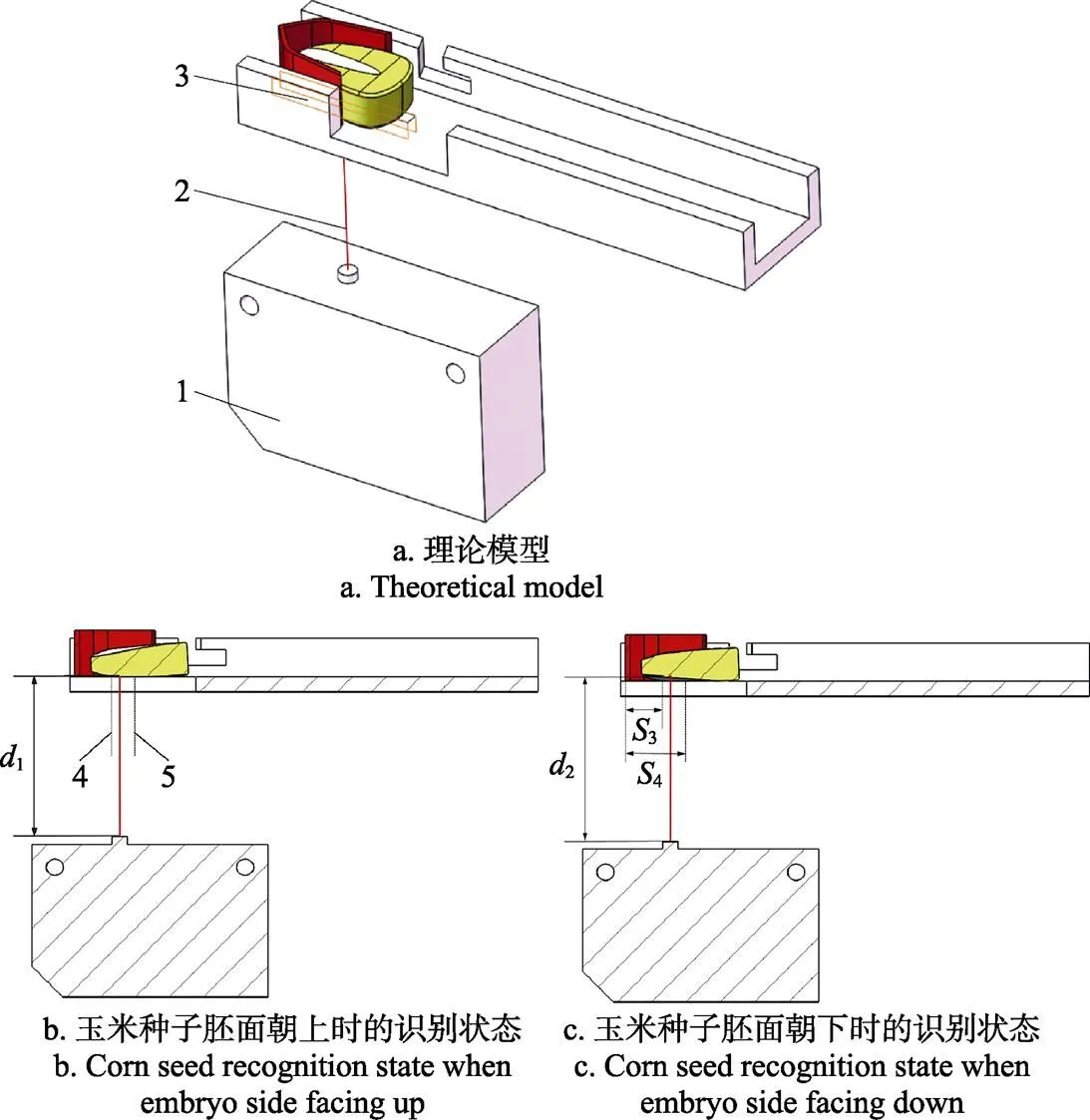
1. 激光测距传感器 2. 激光束 3. 缺口3 4. 前临界线5. 后临界线
1. Laser range sensor 2. Laser beam 3. Gap 3 4. Front critical line5. Back critical line
注:1和2分别为玉米种子胚面朝上和朝下时的检测距离,mm;3和4分别为前临界线和后临界线距种槽顶点的距离,mm。
Note:1and2are the measuring distance when a corn seed’s embryo side facing up and down respectively, mm;3and4are the distance between the tip of seed slot and front critical line, back critical linerespectively, mm.
图4 玉米种子胚面识别原理
Fig.4 Embryo side recognition theory of corn seed
2 玉米种子尖端定向与胚面识别装置设计
在上述原理的基础上,设计一个玉米种子尖端定向与胚面识别装置,主要包括:激光传感器选型、装置设计和控制系统设计。
2.1 激光传感器选型
基于激光开关和测距原理的尖端定向与胚面识别方法需要用到常开型激光开关传感器和高精度激光测距传感器,依据工作要求对2个传感器进行合理选型。激光开关传感器的基本要求是反应灵敏,激光测距传感器的基本要求是检测精度高,由于玉米种子胚沟的最大深度小于1 mm,所以要求测量精度至少达到0.1 mm;为了方便后续控制系统搭建,要求2个激光传感器都可以输出开关信号或模拟信号;为了方便观察传感器的工作情况,要求激光束可见;另外考虑到装置的空间布局较为紧凑、检测对象(玉米种子)尺寸较小,要求2个传感器的体积要尽量小,且保证激光束直径小于1 mm。按照以上要求,激光开关传感器的型号选择为洛施达LQD-31NO,其关键工作参数为:工作电压12~24 V、开关频率120 Hz、感应距离300 mm、激光束直径0.8 mm,该传感器反应灵敏,可输出开关信号,表现为:当检测到物体(激光束被遮挡)时触发并输出低电平;激光测距传感器选择的型号选择为松下HG-C1030,其关键工作参数为:工作电压12~24 V、测量中心距和测量范围(30±5) mm、重复测量精度10m、激光束直径0.05 mm,该传感器可输出开关信号,表现为:传感器设定测量基准后,当实际检测距离小于测量基准时,传感器触发并输出低电平。这2种传感器体积较小,激光束为红色可见,价格便宜,对作业环境要求低。
2.2 装置设计
在介绍玉米种子尖端定向与胚面识别方法原理时,图2和图4中的相关部件为理论模型,在设计试验装置时,相关部件需要结合实际情况进行具体设计,装置结构如图5a所示。为直线轨道底部添加一个底板,底板与直线轨道焊接为一体,底板通过螺栓固定在直线电磁振动器安装面上,底板形状与直线电磁振动器安装面形状一致,长140 mm、宽50 mm,直线轨道总长240 mm,直线轨道和种槽的部分关键尺寸依据玉米种子尺寸范围确定,如图5b所示,为了表达明确,图中只截取了直线轨道的一小段,且隐藏了种槽的把手,种槽长9 mm、入口宽8 mm,入口宽度与玉米种子的平均宽度一致,直线轨道内宽10 mm,略大于玉米种子的最大宽度,而小于玉米种子的最小长度,直线轨道两侧分别有缺口1和缺口2,末端底面中央有缺口3,缺口1呈“L”形,右侧高2 mm,缺口2长15 mm,大于玉米种子的最大长度,缺口3宽1.5 mm。推杆配合电磁铁2组成推送装置。电磁铁1配合直线滑轨组成升降装置,种槽的把手具有固定连接作用,通过螺栓与连接板固定,连接板与升降装置相连接。升降装置固定在立板上,立板、推送装置和激光开关传感器固定于支撑台上面,激光测距传感器固定于支撑台侧面,支撑台则固定在升降台上。
根据设计搭建实际的玉米种子尖端定向与胚面识别装置,按照要求并结合实际情况调整好各部件的空间位置,通过调整升降台的高度、以及2个传感器在支撑台上的位置使激光开关传感器的激光束正好穿过缺口1,激光测距传感器的激光束正好穿过缺口3。由尖端定向与胚面识别原理可知,在水平方向上激光开关传感器和激光测距传感器与种槽之间的前后相对位置十分关键,结合图3和图4,经过实际测量可得激光开关传感器可移动的范围约为5 mm,激光测距传感器可移动的范围约为3.5 mm。
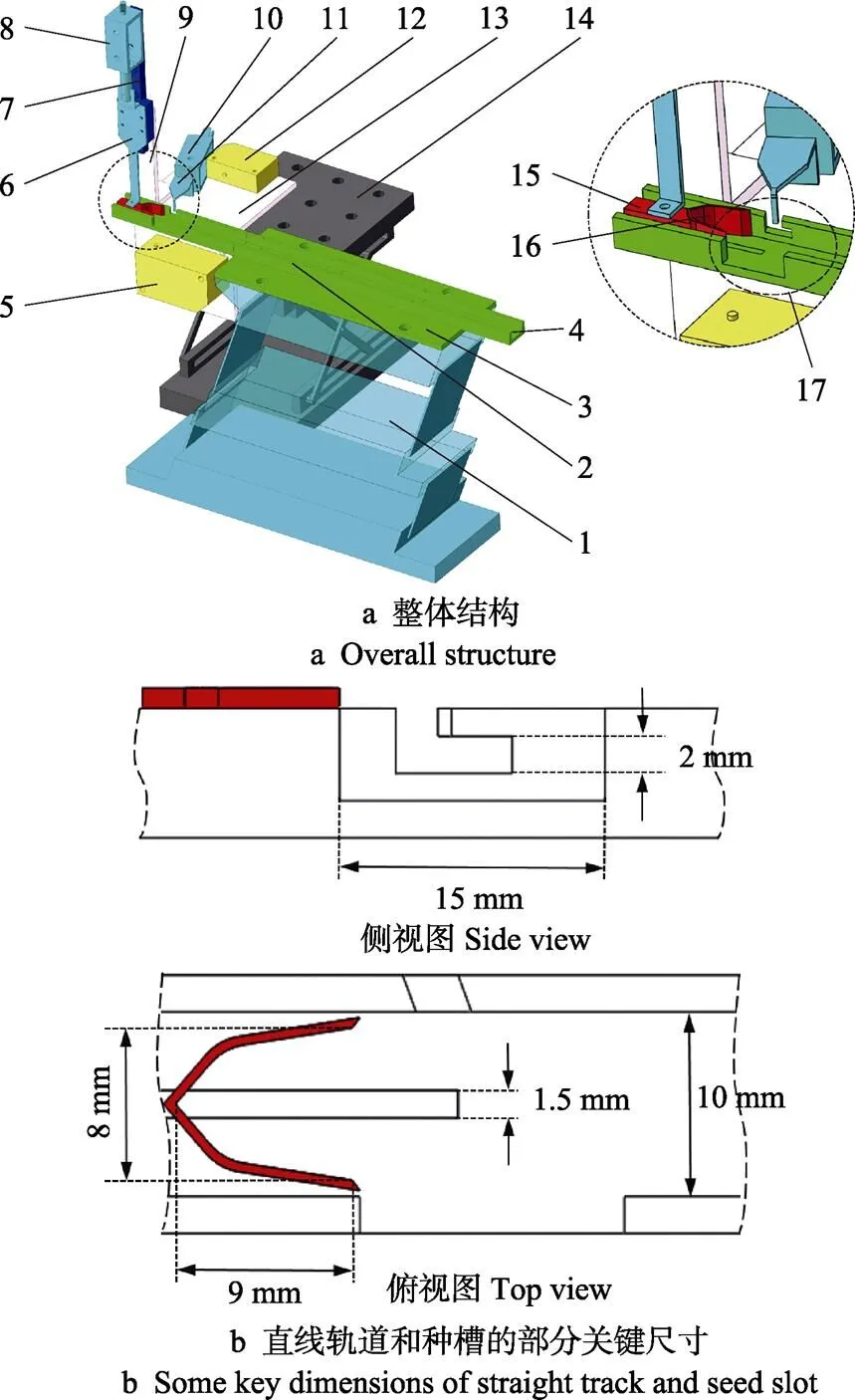
1. 直线电磁振动器 2. 直线轨道 3. 底板 4. 直线轨道入口 5. 激光测距传感器 6. 连接板 7. 直线滑轨 8. 电磁铁1 9. 立板 10. 电磁铁2 11. 推杆 12. 激光开关传感器 13. 支撑台 14. 升降台 15. 把手 16. 种槽 17. 定向区域
2.3 控制系统设计
依据玉米种子尖端定向与胚面识别方法的原理设计控制系统,本研究的控制系统无需上位机,只利用下位机即可完成控制工作。可编程控制器PLC功能强、可靠性高、成本低,多用于开关信号的逻辑控制[23-24]。本研究基于PLC对控制系统进行设计,型号为西门子S7-200 CPU224XP,该PLC为14输入/10输出[25]。
玉米种子尖端定向过程的控制思路:对于尖端朝前和大头朝前2种状态的玉米种子,激光开关传感器的感应状态分别为:断开-触发-断开、断开-保持触发,区别在于前者触发状态的持续时间较短,而后者触发之后会持续下去。PLC使用计时器等指令[26-27]来监测激光开关传感器触发状态的持续时间,假设临界时间0,使0略大于尖端朝前时激光开关传感器触发状态的持续时间(1-0)。识别1颗玉米种子的尖端朝向时,若≤0,则表示激光开关传感器的感应状态为断开-触发-断开,判定为尖端朝前,准备进行下一步的胚面识别;反之,若>0,则表示激光开关传感器的感应状态为断开-触发,判定为大头朝前,控制电磁铁2带动推杆将其推出轨道完成剔除。
玉米种子胚面识别过程的控制思路:设定激光测距传感器的测量基准为0,0略大于1同时小于2。识别1颗玉米种子的胚面朝向时,设实际检测值为,若>0时,传感器不触发,指示绿灯亮,PLC记录0,判定为胚面朝上;反之若≤0时,传感器触发,指示红灯都亮,PLC记录1,判定为胚面朝下。胚面识别结束后,PLC控制电磁铁1通电时间1带动种槽上升并停留一段时间,待玉米种子输出后,放下种槽,PLC的记录值可为后续玉米种子的分类整理及定向包装做准备。对于松下HG-C1030激光测距传感器,一般设定测量基准与测量中心距相等,因此设定0为30 mm。由于0需要略大于1,所以本研究设定1为29.7 mm,根据玉米种子尖端定向原理可知,(2-1)大于0.6 mm,所以2会大于30.3 mm,此时0小于2,满足要求。
根据控制思路进行系统设计,控制流程图如图6所示。时间(0+1)为控制系统的反应时间,0和1与玉米种子在直线轨道中的移动速度成反比关系。由于在0和1时间内玉米种子移动的距离一样,均为种子的长度,所以可设定1=0。
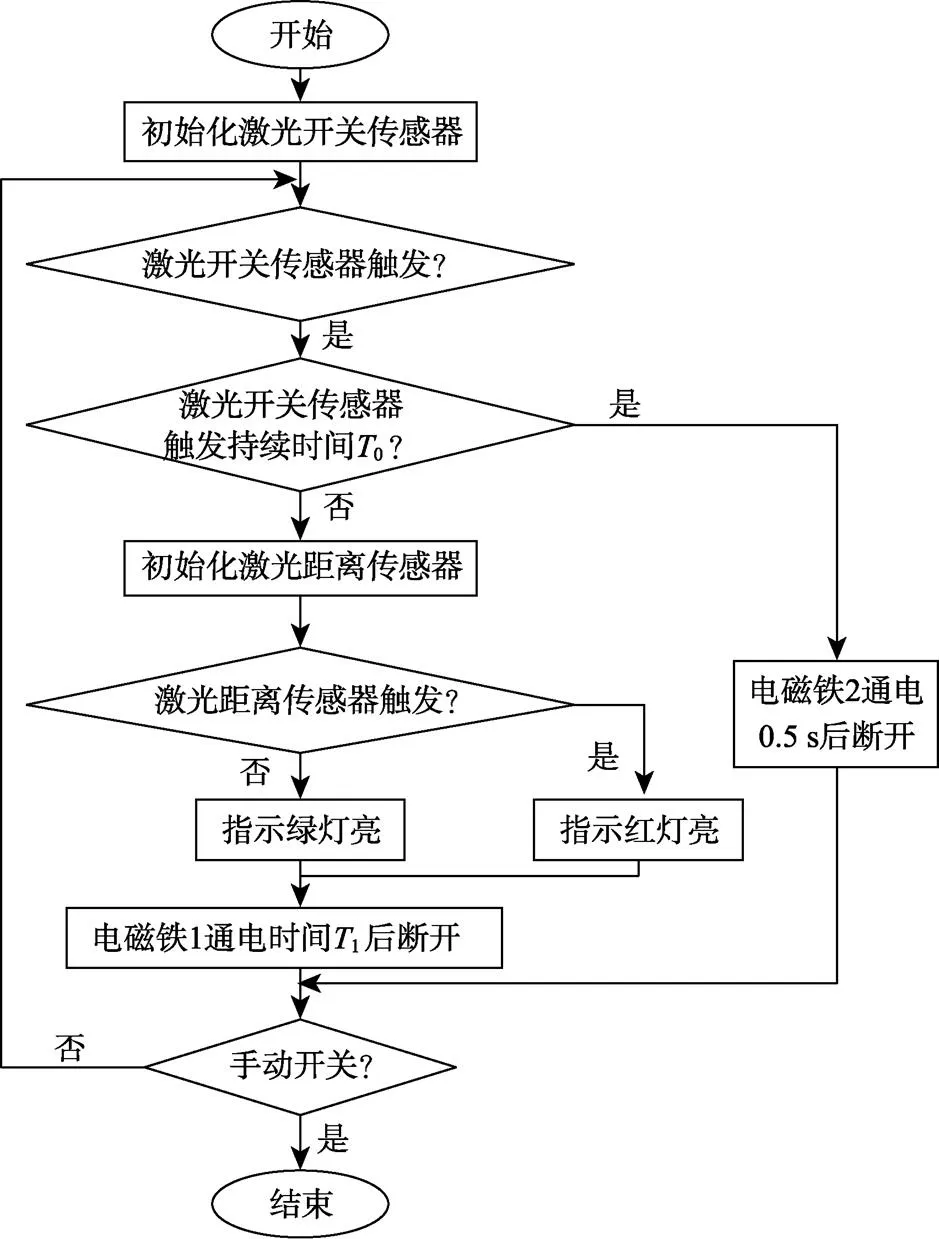
图6 尖端定向与胚面识别装置的控制流程图
玉米种子尖端定向与胚面识别装置的工作过成为:现有尖端定向装置可间断地输出呈平躺姿态的马齿型玉米种子,这些种子由直线轨道入口进入尖端定向与胚面识别装置,种子进入种槽区域后,尖端朝向会被识别完成,少数大头朝前的玉米种子会被推送装置经缺口2推出轨道,完成尖端定向;尖端朝前的玉米种子进入种槽时,其胚面朝向即被识别完成并被PLC记录,升降装置带动种槽向上抬起,玉米种子输出装置。
本文设计的玉米种子尖端定向与胚面识别装置所用到的激光传感器、直线电磁振动器、PLC等价格都比较低,且工作时无需黑色封闭空间等特定环境,相对比机器视觉技术或高光谱成像技术所使用的工业相机、高光谱设备等,具有成本低、对作业环境要求低等优势。
3 玉米种子尖端定向与胚面识别试验
设定直线电磁振动器的振动频率为50 Hz,通过调节其工作电压来控制振幅[28-30],设定工作电压为55 V,此时电磁振动的垂直振幅小于0.1 mm,玉米种子可以在直线轨道中平稳低速移动。取100颗玉米种子进行预试验,测量并统计尖端朝前识别时激光开关传感器触发状态的持续时间(1-0),其范围为[1.14,1.42] s,由于临界时间0需要略大于(1-0),所以本文设定0为1.6 s。
为了验证本文提出的玉米种子尖端定向与胚面识别方法的可行性,将搭建好的玉米种子尖端定向与胚面识别装置与现有的尖端定向装置组装成一个整体试验台(图7),在此基础上进行玉米种子尖端定向与胚面识别试验。现有的尖端定向装置由圆周电磁振动器和具有尖端定向功能的料斗构成。玉米种子先经过现有尖端定向装置完成初步定向,然后由本文尖端定向与胚面识别装置进行尖端定向和胚面识别,最后输出。随机取分级后的1 000颗马齿型玉米种子为试验样本,对玉米种子的外形特征进行统计,种子的长度、宽度范围分别为[8.9, 14.5] mm和[5.7,9.3] mm,部分玉米种子尺寸偏小,长度小于10 mm或宽度小于7 mm的种子数量共有84颗,占总数量的8.4%;大部分玉米种子形状正常,只有7颗玉米种子畸形,表现为胚沟不在胚面中央区域,占总数量的0.7%。以现有尖端定向装置的尖端定向成功率、本文尖端定向与胚面识别装置的尖端定向成功率和胚面识别准确率为试验指标,进行尖端定向与胚面识别试验。
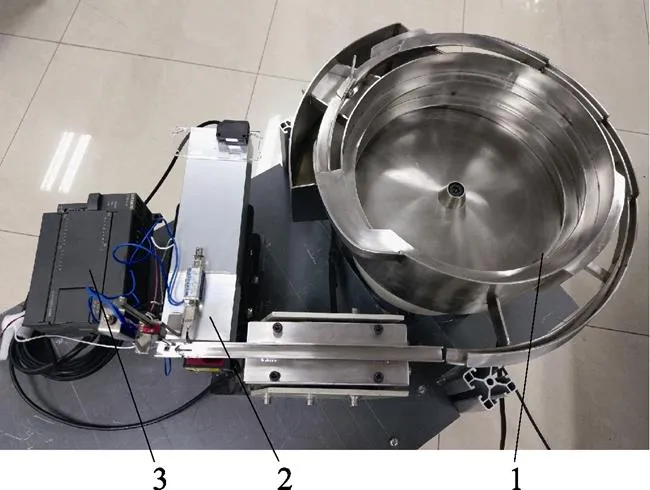
1. 现有尖端定向装置 2. 本文尖端定向与胚面识别装置 3. PLC
试验结果表明:经过现有尖端定向装置之后有104颗玉米种子尖端定向没有成功(仍保持大头朝前),现有尖端定向装置的尖端定向成功率为89.6%;经过本文尖端定向与胚面识别装置后,仅剩9颗玉米种子尖端定向失败,本文尖端定向与胚面识别装置的尖端定向成功率达到99.1%,相比现有的尖端定向装置的尖端定向成功率提升了9.5个百分点,另外本文尖端定向与胚面识别装置的胚面识别准确率为96.4%。
最后输出的玉米种子中仅有9颗尖端定向失败,失败原因为:这些玉米种子大多尺寸偏小,长度小于10 mm或宽度小于7 mm,推杆在推动这些玉米种子时,种子会在轨道上发生转动,而没有经缺口2离开轨道,导致剔除失败。9颗尖端定向失败的玉米种子由于不满足胚面识别条件,直接认定为胚面识别失败,另还有27颗玉米种子胚面识别出错,具体情况有2种:第1种是将实际胚面朝上的玉米种子判定为胚面朝下,第2种是将实际胚面朝下的玉米种子判定为胚面朝上。将2种情况对应的玉米种子分开,分别观察这些玉米种子的自身形状和识别过程,分析后发现,第1种识别出错的主要原因是,这些玉米种子的反面有凹陷不平整,导致激光测距传感器的测量值偏大;第2种识别出错的主要原因是,激光测距传感器的检测光束没有落在胚沟内,导致激光测距传感器的测量值偏小,而导致激光测距传感器的检测光点没有落在胚沟内的原因有2点:在进行胚面识别时,玉米种子在种槽的发生了偏移,即定位作用失效;个别玉米种子畸形,胚沟不在胚面中央区域,胚沟长轴线偏离胚面对称轴较远。
综上,尖端定向失败的情况主要是由于在少数玉米种子尺寸偏小,尺寸偏小的玉米种子占试验样本总数的8.4%,但最后尖端定向失败率只有0.9%。胚面识别失败的主要原因是种槽对少数玉米种子的定位作用不理想。
该试验结果表明本研究提出的尖端定向与胚面识别方法效果良好,对比现有的尖端定向装置,尖端定向成功率有较大的提升,基本可以实现玉米种子的尖端定向,同时能够使胚面识别准确率达到较高水准。
4 结论与讨论
1)在现有的研究成果基础上,以现有尖端定向装置输出的尖端定向不完全、呈平躺姿态的马齿型玉米种子为工作对象,基于激光开关和测距原理,提出了一种马齿形玉米种子尖端定向与胚面识别方法:马齿形玉米种子尖端窄大头宽,依据该轮廓特征,利用激光开关传感器等部件对玉米种子的尖端朝向进行识别,并将大头朝前的玉米种子进行剔除;马齿形玉米种子胚面上有胚沟而反面较为平整,依据该表面特征,利用激光测距传感器可对尖端朝前的每颗玉米种子进行胚面识别,最后输出。
2)设计并搭建了玉米种子尖端定向与胚面识别装置,与现有的尖端定向装置组装成一个整体试验台,在此基础上进行玉米种子尖端定向与胚面识别试验,结果表明:本文尖端定向与胚面识别装置的尖端定向成功率达到99.1%,相比现有的尖端定向装置的尖端定向成功率提升了9.5个百分点,本文尖端定向与胚面识别装置的胚面识别准确率为96.4%。该方法基本可以实现玉米种子的尖端定向,同时保证胚面识别准确率达到较高水准。
本文提出的基于激光开关和测距原理的尖端定向与胚面识别方法对马齿形玉米种子的工作效果良好,但对少数尺寸偏小(长度小于10 mm、宽度小于7 mm)或畸形(胚沟偏离胚面中央区域)的玉米种子适用性不够理想,容易造成尖端定向或胚面识别失败,因此,该装置需继续优化,进一步提高尖端定向成功率和胚面识别准确率。控制系统的反应时间与玉米种子在直线轨道中的移动速度成反比,可以调节直线电磁振动器的振动频率或电压来加快玉米种子的移动速度,以此减小控制系统的反应时间,但是需要确保电磁振动的垂直振幅小于0.1 mm。
本文提出的玉米种子尖端定向与胚面识别方法,可为后续的自动化定向包装及玉米机械化定向播种提供参考。
[1] Torres G, Vossenkemper J, Raun W, et al. Maize () leaf angle and emergence as affected by seed orientation at planting[J]. Experimental Agriculture, 2011, 74(4): 579-592.
[2] Yarnia M, Tabrizi E F M. Effect of seed priming with different concentration of GA3, IAA and kinetin on azarshahr onion germination and seedling growth[J]. Journal of Basic and Applied Scientific Research, 2012, 2(3): 2657-2661.
[3] Cole R J, Holl K D, Keene C L, et al. Direct seeding of late-successional trees to restoretropical montane forest[J]. Forest Ecology and Management. 2011, 261(10): 1590-1597.
[4] 国务院关于加快推进现代农作物种业发展的意见[EB/OL].(2011-04-18)http://www.gov.cn/zhengce/content/2011-04/18/content_2828.htm. 2018-07-02.
[5] 韩长赋. 要加快制定我国玉米产业发展战略规划[EB/OL].(2012-05-30)http://finance.people.com.cn/GB/ 70392/18022689.html. 2018-07-25.
[6] 侯彦龙,徐丽明,陈莉明. 玉米机械化定向播种技术的现状和发展趋势[J]. 农机化研究,2012,34(2):10-14. Hou Yanlong, Xu Liming, Chen Liming. The current situation and development trend of corn mechanization oriented seeding technology[J]. Journal of Agricultural Mechanization Research, 2012, 34(2): 10-14. (in Chinese with English abstract)
[7] 徐丽明,何绍林,邢洁洁. 一种玉米定向种子带播种装置:201410546528.9[P]. 2017-02-01.
[8] 赵学观,徐丽明,何绍林,等. 玉米定向种子带恒张力卷绕系统自适应模糊PID控制[J]. 农业机械学报,2015,46(3):90-96. Zhao Xueguan, Xu Liming, He Shaolin, et al. Constant tension winding system of corn directional belt making machine based on self-adaptive fuzzy-PID control[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 90-96. (in Chinese with English abstract)
[9] 徐丽明,邢洁洁,高振铭,等.一种玉米定向式种子子弹制作装置:201510292460.0[P]. 2016-08-24.
[10] 邢洁洁,徐丽明,袁全春,等.马齿型玉米种子定向播种推送装置设计与试验[J]. 农业工程学报,2018,34(17):9-15.Xing Jiejie, Xu Liming, Yuan Quanchun, et al. Design and test of pushing device for dent corn seeds directional sowing[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(17): 9-15. (in Chinese with English abstract)
[11] 徐丽明,王应彪,赵学观,等.一种玉米种子定向方法及定向装置:201210443038.7[P].2014-10-22.
[12] 邢洁洁,徐丽明,袁全春,等.马齿型玉米种子侧立定向定距输出装置的设计与试验[J].农业工程学报,2018,34(4):55-63. Xing Jiejie, Xu Liming, Yuan Quanchun, et al. Design and test of dent corn seed directional and fixed-distance output device with lateral standing posture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(4): 55-63.(in Chinese with English abstract)
[13] 徐丽明,邢洁洁,袁全春,等.一种玉米种子侧立勺式定向定距输出装置:201710656685.9[P].2017-12-08.
[14] 张俊雄,武占元,宋鹏,等.玉米单倍体种子胚部特征提取及动态识别方法[J].农业工程学报,2013,29(4):199-203. Zhang Junxiong, Wu Zhanyuan, Song Peng, et al. Embryo feature extraction and dynamic recognition method for maize haploid seeds[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(4): 199-203. (in Chinese with English abstract)
[15] 王侨,陈兵旗,寇春荣,等.基于机器视觉的玉米种粒定向定位摆放装置研制[J].农业工程学报,2017,33(11):19-28. Wang Qiao, Chen Bingqi, Kou Chunrong, et al. Development of corn seed directional positioning machine based on machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(11): 19-28. (in Chinese with English abstract)
[16] 刘长青,陈兵旗,张新会,等.玉米定向精播种粒形态与品质动态检测方法[J].农业机械学报,2015,46(9):47-54. Liu Changqing, Chen Bingqi, Zhang Xinhui, et al. Dynamic detection of corn seeds for directional precision seeding[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(9): 47-54. (in Chinese with English abstract)
[17] 陈兵旗,王侨,刘长青,等. 一种玉米种子图像精选装置及其使用方法:201410245826.4[P].2017-07-14.
[18] 王侨,陈兵旗,杨曦,等.用于定向播种的玉米种穗图像精选方法[J].农业工程学报,2015,31(1):170-177. Wang Qiao, Chen Bingqi, Yang Xi, et al. Corn ears image selection method for directional seeding[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(1): 170-177. (in Chinese with English abstract)
[19] Huang Wenqian, Li Jiangbo, Zhang Chi, et al. Identification of maize kernel embryo based on hyperspectral imaging technology and PCA[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(Supp.2): 243-247.
黄文倩,李江波,张驰,等.高光谱成像技术和主成分 分析识别玉米籽粒的胚[J].农业工程学报,2012,28(增刊2):243-247. (in English with Chinese abstract)
[20] 宁纪锋,何东健,杨蜀秦.玉米籽粒的尖端和胚部的计算机视觉识别[J].农业工程学报,2004,20(3):117-119. Ning Jifeng, He Dongjian, Yang Shuqin. Identification of tip cap and germ side of corn kernel using computer vision [J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(3): 117-119. (in Chinese with English abstract)
[21] 韩仲志,赵友刚,杨锦忠.基于籽粒 RGB 图像独立分量的玉米胚部特征检测[J].农业工程学报,2010,26(3):222-226. Han Zhongzhi, Zhao Yougang, Yang Jinzhong. Detection of embryo based on independent components for kernel RGB images in maize[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(3): 222-226. (in Chinese with English abstract)
[22] 程洪,史智兴,尹辉娟,等.基于机器视觉的多个玉米籽粒胚部特征检测[J].农业工程学报,2013,29(19):145-151. Cheng Hong, Shi Zhixing, Yin Huijuan, et al. Detection of multi-corn kernel embryos characteristic using machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(19): 145-151. (in Chinese with English abstract)
[23] 杨积慧.浅谈DCS、SIS、PLC三大控制系统的特点、差异及发展[J]. 中国仪器仪表,2016(1):67-72. Yang Jihui. The brief discussion on the feature/differences and development of DCS/SIS/PLC control system[J]. China Instumentation, 2016(1):67-72. (in Chinese with English abstract)
[24] 向晓汉,黎雪芬.PLC技术实用手册[M].北京:化学工业出版社,2018.
[25] 廖常初.S7-200 PLC编程及应用[M].北京:机械工业出版社,2014.
[26] 王德.西门子PLC控制技术[M].北京:机械工业出版社,2014.
[27] 黄有全.PLC应用技术[M].北京:机械工业出版社,2012.
[28] 邢洁洁,徐丽明,史丽娜,等.玉米种子电磁振动定向装置仿真模型的建立与验证[J].中国农业大学学报,2017,22(4):129-134. Xing Jiejie, Xu Liming, Shi Lina, et al. Establishment and verification for the simulation model of directional device based on electromagnetic vibration for corn seeds[J]. Journal of China Agricultural University, 2017, 22(4): 129-134.(in Chinese with English abstract)
[29] 邢洁洁,徐丽明,袁全春,等.直线电磁振动下玉米种子定向传输的模拟仿真试验与验证[J].中国农业大学学报,2017,22(10):120-125. Xing Jiejie, Xu Liming, Yuan Quanchun, et al. Simulation test and verification of corn seeds’ directional transmission under linear electromagnetic vibration[J]. Journal of China Agricultural University, 2017, 22(10): 120-125.(in Chinese with English abstract)
[30] 顾平灿. 电磁振动给料器给料速度的研究[J]. 机电工程,2012,29(7):790-794. Gu Pingcan. Research on feeding speed of electromagnetic vibration feeder[J]. Mechanical & Electrical Engineering Magazine, 2012, 29(7): 790-794. (in Chinese with English abstract)
Development of tip orientation and embryo side recognition device for dent corn seeds
Xing Jiejie, Xu Liming※, Ma Shuai, Yuan Quanchun, Chen Chen, Zeng Jian, Niu Cong
(100083,)
Automatic directional packaging of corn seeds is the precondition for realizing mechanical directional sowing of corn. The key technology is tip orientation and embryo side facing recognition. Combined with the actual demand of directional packaging, tip orientation for dent corn seeds needs that the tip orientation success rate reaches 100% (i.e. the tip is completely directed), and the embryo side facing recognition accuracy rate is required to achieve a high level at the same time. In addition, combining the actual demand of agricultural production and popularization, the method and its dependent device used to realize the tip orientation and embryo side recognition method for corn seeds should have low requirements for the working environment and the operation cost should be reduced as far as possible. The existing methods of tip orientation and embryo recognition are difficult to fulfil practical requirement. On the basis of the available research results of the research team, taking dent corn seeds with horizontal posture and tip orientation incomplete exported by existing tip orientation device as research object, a tip orientation and embryo side recognition method for dent corn seeds based on laser switch and range theory was proposed and the tip orientation and embryo side recognition device was designed in this paper. According to the shape characteristics of the corn seeds, the corn seeds large head facing forward was removed by using the laser sensors and other components first to get the seeds tip orientation done, and then the embryo side facing direction of each corn seed was identified one by one and outputed. There were 2 main characteristics of the corn seed shape: shape characteristic and surface characteristic. The shape characteristic was that the outline of corn seed was similar to "V" shape with narrow tip and wide large head, the surface characteristic was that there was a germinal groove extending from tip to large head on the embryo side, and the germinal groove shape was approximately elliptical, and its long axis coincided with the symmetric axis of the embryo side, the reverse side was smooth. The tip orientation method was proposed based on the shape characteristics of corn seed and laser switch sensor. Referring to the shape characteristics of the corn seed, a "V" shape slot was designed, the corn seeds with tip facing forward could enter into the slot, while the corn seeds with large head facing forward could not enter the slot as the large head of seed would block the entrance, based on this difference, by means of a normally open laser switch sensor, a specific straight track and a push rod, the tip orientation of each corn seed could be identified and the corn seeds with large head facing forward were removed. When the seed’s tip was oriented, it would be stayed in the slot with tip facing forward, and then the direction of embryo side would be recognized based on the surface characteristic and laser range sensor. With the combined of designed device and existing tip orientation device, a practical test bench was built and the orientation test for dent corn seeds was carried out to verify the actual effect of tip orientation and embryo side recognition method. The result showed that: the tip orientation success rate of existing tip orientation device was 89.6%, the embryo side recognition accuracy rate of designed device was 96.4% and the tip orientation success rate of designed device was 99.1%, which increased by 9.5 percentage points comparing with the existing tip oriented devices. The orientation method proposed in this study could basically realize the tip orientation of the corn seeds, and at the same time, the embryo side recognition accuracy rate could be reached to a high level. Generally, the tip orientation and embryo side recognition method and the device proposed in this paper have low requirements for working environment and low operation cost, which could provide a reference for automatic directional packaging and mechanically directional sowing of corn.
mechanization; seed; design;corn seed tip orientation; embryo side recognition; laser sensor
邢洁洁,徐丽明,马 帅,袁全春,陈 晨,曾 鉴,牛 丛.马齿形玉米种子尖端激光定向与胚面识别装置研制[J]. 农业工程学报,2019,35(3):52-59. doi:10.11975/j.issn.1002-6819.2019.03.007 http://www.tcsae.org
Xing Jiejie, Xu Liming, Ma Shuai, Yuan Quanchun, Chen Chen, Zeng Jian, Niu Cong.Development of tip orientation and embryo side recognition device for dent corn seeds[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(3): 52-59. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.03.007 http://www.tcsae.org
2018-07-25
2018-01-10
国家自然基金项目(51475461)
邢洁洁,博士生,主要从事生物生产自动化研究。 Email:584731137@qq.com
徐丽明,教授,博士生导师,主要从事生物生产自动化技术与装备研究。Email:xlmoffice@126.com
10.11975/j.issn.1002-6819.2019.03.007
SS233.7
A
1002-6819(2019)-03-0052-08
