动态特性可调的微动平台优化设计
2019-02-22查雄飞杨志军胡颖怡
查雄飞,杨志军,胡颖怡
(广东省微纳加工技术与装备重点实验室,广东 广州 510006)
0 引言
微动平台是一种高精度、高分辨率和小行程的微位移机构,被广泛应用于微纳精密操作、超精密加工等精密位移输出和补偿领域[1]。柔性机构利用材料的弹性变形来实现运动、力和能量的传递与转化,因其具有体积小,无机械摩擦,无间隙,免润滑及免装配等优点而受到广泛的研究[2]。
现有微动平台主要采用压电陶瓷和音圈电机作为驱动器。其中,具有高分辨率、高刚度和结构紧凑等优点的压电陶瓷应用更广泛[3],可实现纳米级定位,但由于存在材料非线性迟滞蠕变特性,需要研究迟滞模型进行补偿[4-6],同时,压电陶瓷行程较小,难以满足现代测试和加工对运动的大行程要求。音圈电机的输出力与通过电流成比例,配合位移闭环反馈,可实现较大行程的运动和精密的位移,奠定了其在微定位平台方面的应用潜力[7]。
目前,柔性铰链的设计方法主要有基于伪刚体模型的设计方法和拓扑优化设计方法[2],国内外学者对基于柔性铰链的微动平台的柔度、等效刚度、固有频率、阻尼系数等进行了研究,获得了大量的优化设计方法和创新机构[8-10]。传统柔性铰链机构动态特性是固定的,只需要考虑驱动信号的补偿即可。针对现有柔性铰链机构存在动态特性受设计制造误差影响(制造精度要求高)、高频精密输出保持性差(存在应力集中)、变工况适应性差(可变频率操作)等不足,本文参考弦乐器的频率调节原理(改变张紧力),基于应力刚化效应,建立动态特性可调的柔性铰链设计新方法,为高精密智能平台的开发打下基础。
1 微动平台的优化设计
1.1 动态特性可调设计思想
研究表明,弦的振动频率与弦长、密度的平方根成反比,与张紧力的平方根成正比。因此,选择一定密度的弦之后,可以通过张紧力(螺栓)和弦长(移动接触点位置)来调节频率;在弹奏过程中,还可通过按压改变弦的张紧力来动态改变弦的频率。
应力刚化是指构件某方向的刚度随应力状态改变的特性,基于应力刚化效应,作者开发了一种等效刚度、固有频率可调的新型微动平台,如图1所示。该微动平台主要采用对称布置的弹片式柔性铰链作为支撑和导向机构,并设计张紧力调节机构,通过压电陶瓷调节弹片的预应力来改变微动平台微动部分的刚度和固有频率,动态匹配作为驱动部件的音圈电机在不同输入频率下的位移输出。

图1 微动平台三维模型
1.2 微动平台的结构设计
在设计中,根据柔性铰链机构的工作空间要求,确定平台外框架及微动部分的轮廓尺寸。其次,柔性铰链对动态特性要求极高,为了实现精密动态位移输出,需设计张紧力调节机构。综合考虑平台的工作刚度、频率、承载刚度等力学性能指标[11],设计平台的工作刚度、频率的初始值及调节范围。考虑柔性铰链端部应力集中产生的疲劳寿命问题,采用含外倒角的弹片式柔性铰链,如图2所示。

图2 微动平台主结构
为了消除传统单边柔性铰链横向位移时产生的轴向伴生位移,将弹片式柔性铰链对称布置于微动台的两侧。由于应力刚化效应,柔性铰链的刚度由弯曲刚度和应力刚化引起的刚度两部分组成。取单个柔性铰链为研究对象,相当于一端固定、另一端导向的梁。由文献[8,11]可计算出平台的初始刚度k=1.166 5×105N/m,等效质量me=0.227 8 kg,频率调节范围为113.89~151.18 Hz。
1.3 调节机构的优化设计
为了降低柔性铰链应力集中产生的疲劳破坏,实现微动平台高精密位移输出,本文采用COMSOL Multiphysics和MATLAB联合仿真对张紧力调节机构进行参数优化,让调节机构尽可能均匀,并尽量保持线性调节关系。因此,优化设计的目标为选取合适的受力壁厚m和变形薄壁壁厚b,并设置变量关系:m=2r+b(r为槽的半径,见图3),使柔性铰链的应力分布最小化。

图3 调节机构优化参数示意图
由于柔性铰链对称分布于微动台的两侧,可选取其中一根柔性铰链作为研究对象,均匀提取弹片上中心点的应力,并计算其均方差,建立相应的优化模型:
s.t.σ≤[σ],x1∈(m0,m1),x2∈(b0,b1)
(1)
为了确定调节机构槽的宽度,建立变量关系m=2r+b,联合仿真优化得出最优参数r=3 mm,b=1.3 mm,结果如图4所示。

图4 柔性铰链应力均方差
2 微动平台的有限元分析
使用COMSOL Multiphysics对微动平台进行有限元建模,并进行相应的静、动态特性分析,得到微动平台的位移行程范围、刚度调节范围、固有频率变化范围及微动台的等效质量。
2.1 静力位移分析
在x方向(压电陶瓷驱动方向)施加间隔200 N的0~2 000 N驱动力,在y方向(音圈电机驱动方向)不施加力。由图5的有限元分析结果可知,平台调节机构的张紧力与位移之间呈线性关系。
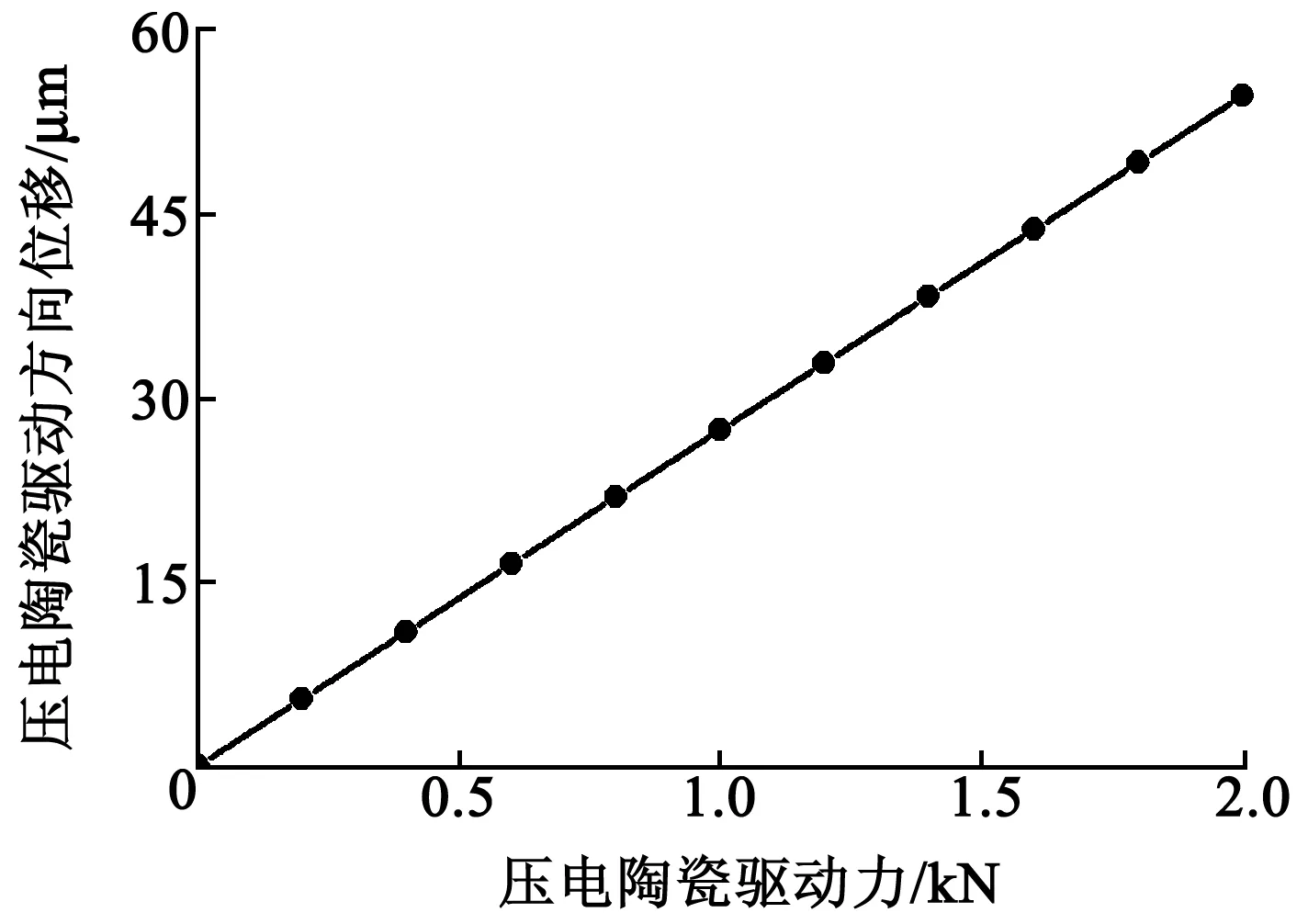
图5 调节机构驱动力同位移的关系
2.1 频率分析
在COMSOL Multiphysics的稳态研究模块中对求解器相关参数进行配置,求解结果如图6所示。
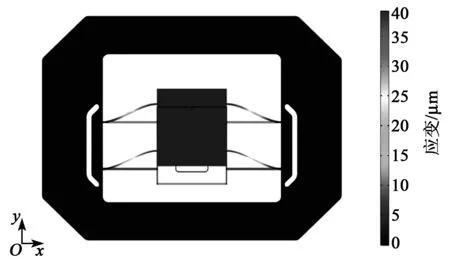
图6 平台应力分析
在x方向施加间隔200 N的0~2 000 N驱动力,可求解得到不同张力下微动平台的固有频率,如图7所示。由图可知,平台的固有频率与压电陶瓷的张紧力近似成线性调节关系,初始固有频率为110.89 Hz,频率可连续调节到155.28 Hz,调节范围在40%以上。
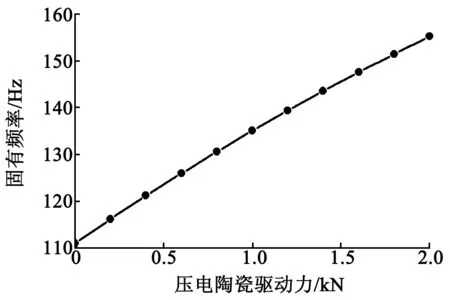
图7 微动平台不同张力下的固有频率
3 微动平台的固有频率测试
微动平台的固有频率实验测试系统由微动平台、计算机、压电陶瓷驱动器及驱动电源、NI数据采集卡和加速度传感器构成,实验操作系统的实物搭建如图8所示。
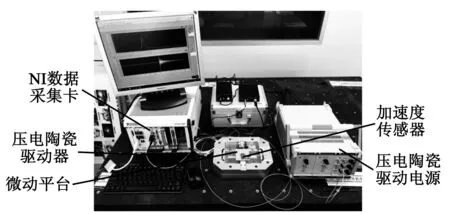
图8 微动平台性能测试实验系统
给压电陶瓷施加0~120 V~0的驱动电压,采用敲击法对调节机构的张力和微动平台的固有频率之间的关系进行测试。实验过程:用冲击锤沿音圈电机驱动方向敲击中间微动台,平台所产生的加速度由压电式加速度传感器测得,经NI数据采集卡采集,并由Labview作快速傅里叶变换(FFT)分析处理,获得微动台的频率响应如图9所示。图中,未施加张力时的初始频率响应f=112 Hz。
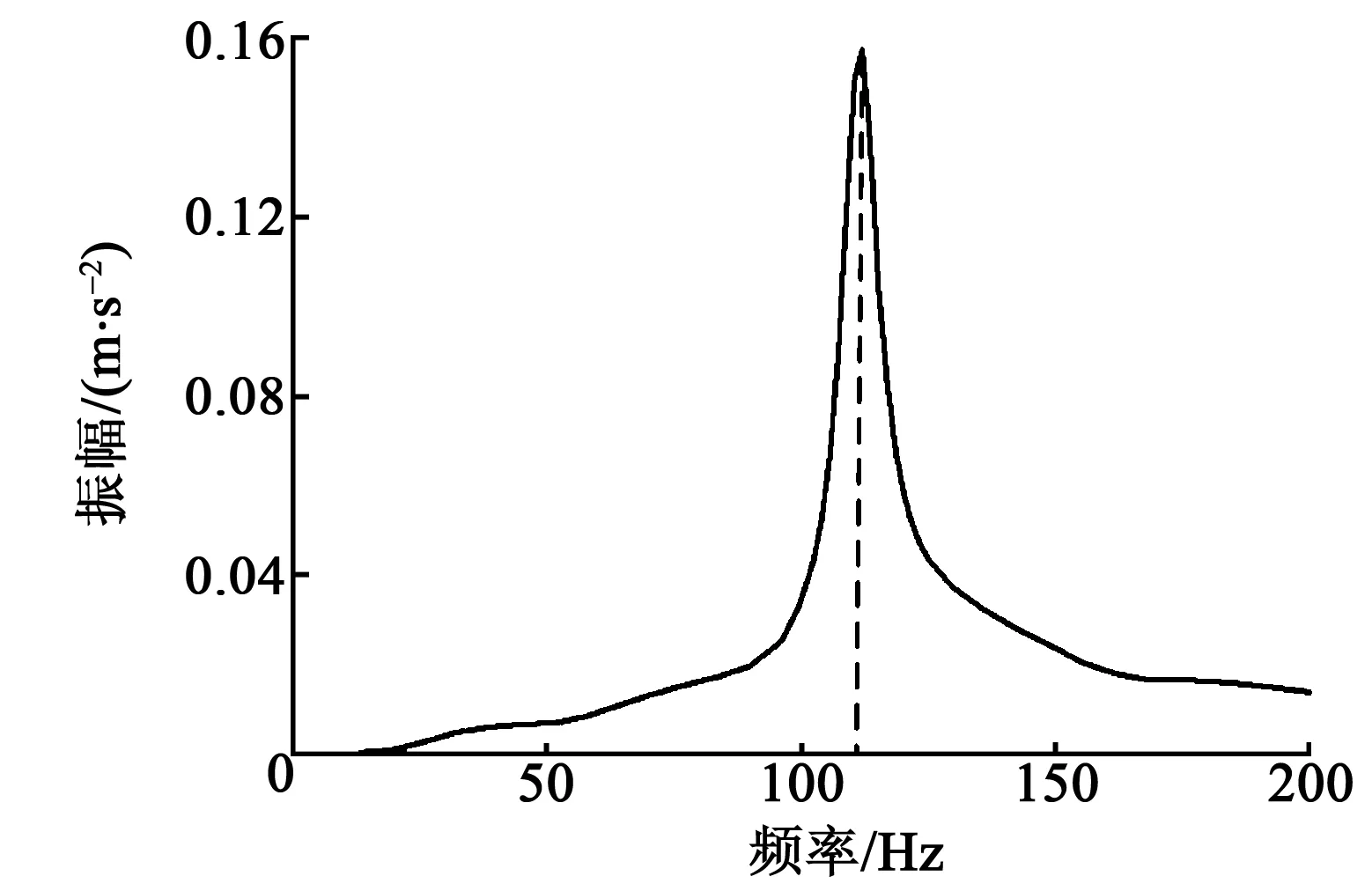
图9 微动平台的频率响应
由测试结果可知,压电陶瓷的驱动电压与微动平台的固有频率之间呈高度线性关系,驱动电压0~120 V(调节位移0~30 μm)下的频率调节范围为112.0~135.6 Hz(21.07%)。对比同等调节位移下有限元的分析结果为110.89~137.08 Hz(23.62%),频率调节范围相差2.55%(2.59 Hz)。
4 结论
1) 柔性铰链的动态特性受设计制造误差的影响,长期以来都是微动平台高精密位移输出的瓶颈。本文基于应力刚化效应,设计动态特性在一定范围内可调的微动平台,突破传统柔性铰链固定动态特性参数优化的设计理念,降低了设计制造成本和加工精度,提高了动态特性的适应性。
2) 本文设计的微动平台能够适应工况需求进行动态特性匹配,符合智能制造的发展趋势,为智能柔性铰链机构的开发提供了思路。不过,还有很多工作需要研究。如采用移动支撑和张紧力复合调节进行动态特性匹配,实现柔性铰链机构的动态特性高频精密可调;针对频率和振幅变化的工况,如何设计控制系统,实现动态特性自适应匹配。