谐振式光学陀螺锁频偏差的消除方法研究
2019-02-22张成飞刘文耀
孙 颖,张成飞,刘文耀,唐 军,刘 俊
(中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051)
0 引言
谐振式光学陀螺是一种基于Sagnac效应的惯性导航器件,其可以根据核心敏感单元光学谐振腔受旋转所引起的光频差测量出转动角速度[1],且在干涉式光纤陀螺中需要使用几公里长的光纤环进行传感[2],在谐振式光学陀螺中仅需要使用几米长的光纤构成的谐振腔,减小了陀螺系统的体积,且理论精度可达10-4(°)/h[3],因此,谐振式光学陀螺由于体积小,精度高及无可动部件等优势有望成为下一代惯性导航器件,受到国内、外研究机构的广泛关注和研究。Sagnac效应引起的光频差仅有几百赫兹,而受温度等环境因素引起的频率漂移远高于频差,影响角速度传感,因此,在谐振式光学陀螺系统中需调节激光器的输出频率使陀螺中的一路光频率跟踪锁定在谐振腔频率上,探测另一路光的输出实现旋转角速度的测量[4]。
小型化的窄线宽半导体激光器由于体积小,线宽窄和易调谐等优点成为谐振式光学陀螺理想的小型化光源[5],但是该类型的光源输出功率伴随频率调谐而变化,会在系统中引入激光光功率的波动噪声[6],文献[7-8]中发现,该噪声会影响光学陀螺的随机游走系数和标度因数非线性度,但本文发现,光功率波动时受相位调制器残余强度调制的影响,谐振式光学陀螺的解调曲线中心点会随光功率变化而波动,且在陀螺系统中,解调曲线中心点代表谐振频率点即锁频点,应为固定值,因此,解调曲线中心点波动会影响陀螺长期零偏稳定性,形成长期漂移,本文采用分束器与Y波导形成三路光信号,两路正常进入陀螺系统,另一路实时监测光功率波动,通过标定对设置的锁频点做出调整,从而抑制光功率波动造成的输出路长期漂移,使系统达到更优的工作状态。
1 谐振式光学陀螺工作原理
图1为谐振式光学陀螺的系统图。激光器发出的光经过隔离器后使其单向传输,该光束进入铌酸锂Y波导调制器后,被分成两束功率相等、方向相反的光波,并在该调制器中进行不同频率(使用不同信号发生器发出的两个正统波,即SG1和SG2)的相位调制,便于进行微弱信号检测与抑制背向散射等光学噪声[9],两束光通过耦合器后进入到环形谐振腔(FRR)中,光波在谐振腔内进行多次传输后通过环形器输出至光电探测器(PD1和PD2)处实现光电转换,并对转换后的电信号进行同步解调(用数字锁相放大器LIA1和LIA2)得到两路光的解调信号,其中一路解调输出作为误差信号传递给伺服控制器,将伺服控制器输出端接入激光器的频率调谐端,通过调节伺服控制器参数改变控制器的输出信号大小,实现激光器的输出频率始终跟踪锁定在谐振腔的谐振频率处,通过检测另一路光波的解调输出大小,从而实现角速度的测量[10]。

图1 谐振式光学陀螺的系统图
2 理论与实验研究
在谐振式光学陀螺系统中使用的光源为RIO公司的半导体激光器,根据其技术手册可知,该激光器存在光功率波动问题,其光功率随扫描电压而变化,根据谐振式光学陀螺系统的数学模型得到其解调曲线公式[11]为
h-nh-(n+1)sin(φ-n-φ-(n+1))]
(1)
式中:VLIA为解调曲线电压值;I为光功率;P为各个光学器件转换效率乘积;D为电路增益;hn为光场在环型谐振腔中的传输系数;φn为环型谐振腔引起的相位延迟。在保持其他参数不变的情况下,仅改变I可仿真得出各个解调曲线如图2所示。由图可知,不同光功率下,虽然解调曲线线性区斜率与幅值发生改变,但解调曲线的中心点始终在同一点上,因此,在谐振式光学陀螺系统中使用伺服控制器进行频率锁定时,将解调曲线中心点作为锁频点且设置为固定值,解调曲线动态地进入到伺服控制器中作为误差信号与锁频点进行比较判断,并通过改变控制器参数调节控制器输出信号大小,最终实现激光器频率锁定。
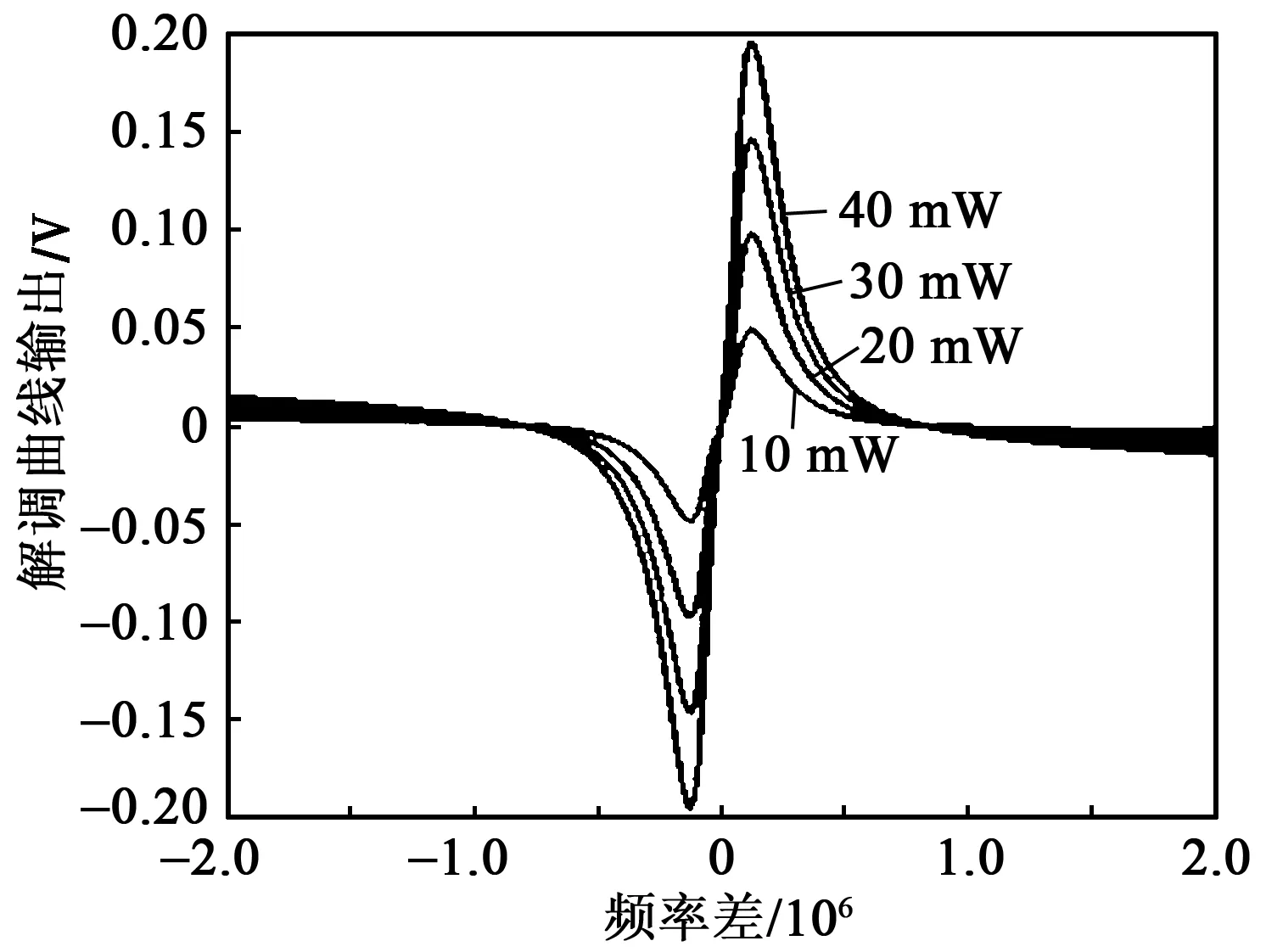
图2 解调曲线仿真图
在进行激光器扫描测试时,即使用锯齿波信号扫描激光器,则激光器的输出光功率发生变化,并通过光电探测器转化为电压值后接入示波器,同时在陀螺系统中进行调制解调得到解调曲线接入示波器,两者曲线如图3所示。由图可知,在光功率逐渐变大时,解调曲线中心点也在逐步上移。分析陀螺系统的各个光学器件的本征特性,如相位调制器、耦合器和分束器等,发现该现象产生的原因是由于激光器输出光功率波动在Y波导调制器的残余强度调制的作用下,引起解调曲线的中心点偏移[12-14],故在此时进行激光器的频率锁定,锁频点将不再为谐振频率点,因此,陀螺输出路将出现低频漂移,影响陀螺的长期零偏稳定性。

图3 光功率与解调曲线测试图
3 改进方案与测试
为了去除激光光源功率波动对陀螺系统带来的影响,进行了改进方案(见图4),本系统中使用RIO激光器作为系统光源,铌酸锂Y波导调制器作为相位调制器,1 550 nm波段的雪崩光电二极管作为光电探测器,采用光纤腔作为陀螺系统的核心敏感单元,其品质因数Q=106,采用Xilinx公司Virtex-4系列的现场可编程门阵列(FPGA)作为系统的主控芯片,并采用16位数模转换芯片输出解调曲线。
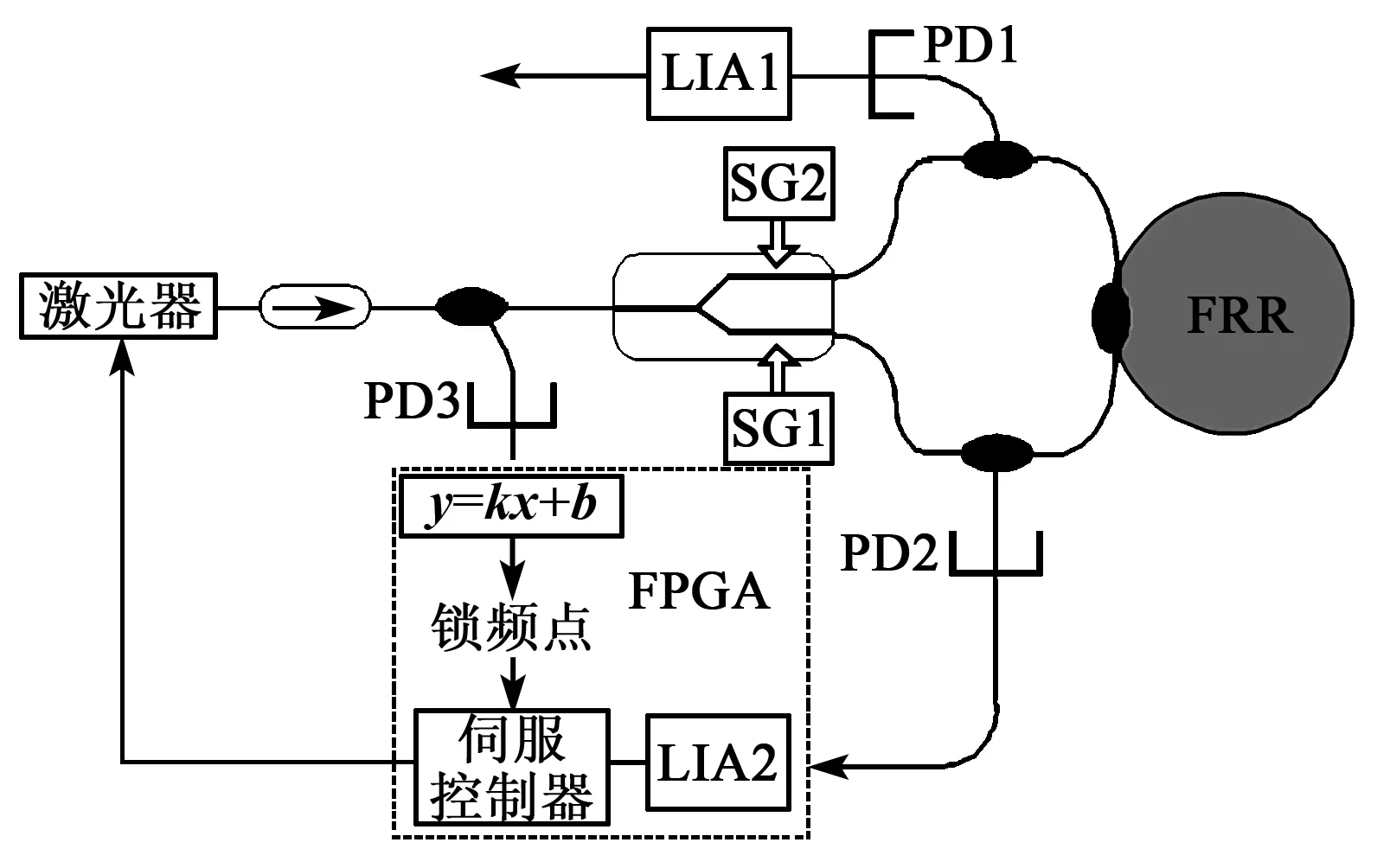
图4 改进陀螺系统方案图
在激光器发出的激光通过隔离器后,使用分束器让其分成两束光,其中一束光进入铌酸锂Y波导调制器实现正常陀螺系统中的相位调制,光电转换和同步解调等功能,并得到两路光波的解调曲线,另一束光则进入光电探测器PD3将光功率信号转化为电信号,并通过模数转换将该电信号转换为数字量进入到FPGA中,且由于谐振腔输出的两路光信号转化为电信号后,在FPGA中使用锁相放大器算法实现同步解调,因此,使用ISE中的chipscope工具对光功率信号与解调曲线中心点进行数字量抓取,并得到线性关系式为:y=kx+b(其中y为解调曲线中心点,x为光功率对应的电信号,k=0.002 937为斜率;b=32 768为常量),由于光功率与解调曲线中心点为线性关系,因此,可以通过标定形式对锁频点进行实时补偿,即根据实时输入的光功率信号通过y=kx+b得出该光功率下对应的解调曲线中心点,并将其设置为伺服控制器中的锁频点,采用此方法后陀螺系统的锁频点将一直处于跟随光功率变化的状态,此时设置合适的伺服控制参数后实现激光器频率锁定,可以完全去除光功率波动对陀螺系统的影响。
在同一系统中通过按键控制改进系统与常规系统算法切换,便于进行改进系统的陀螺输出路测试与常规陀螺系统输出路测试对比,图5为实际测试结果。前半段为未进行光功率补偿的陀螺输出信号,后半段为光功率补偿得到的陀螺输出信号。由图可知,后半段数据无明显漂移趋势,输出稳定,且对两路信号进行Allan方差计算,两者曲线如图6所示。其中补偿后的陀螺输出长期零偏稳定性较好(为80 (°)/h),未进行补偿输出长期零偏稳定性为278 (°)/h,降低了192 (°)/h。因此该方案效果明显,可有效抑制光功率引起的低频漂移。
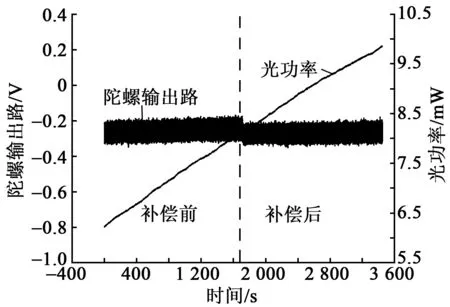
图5 陀螺输出路测试对比图
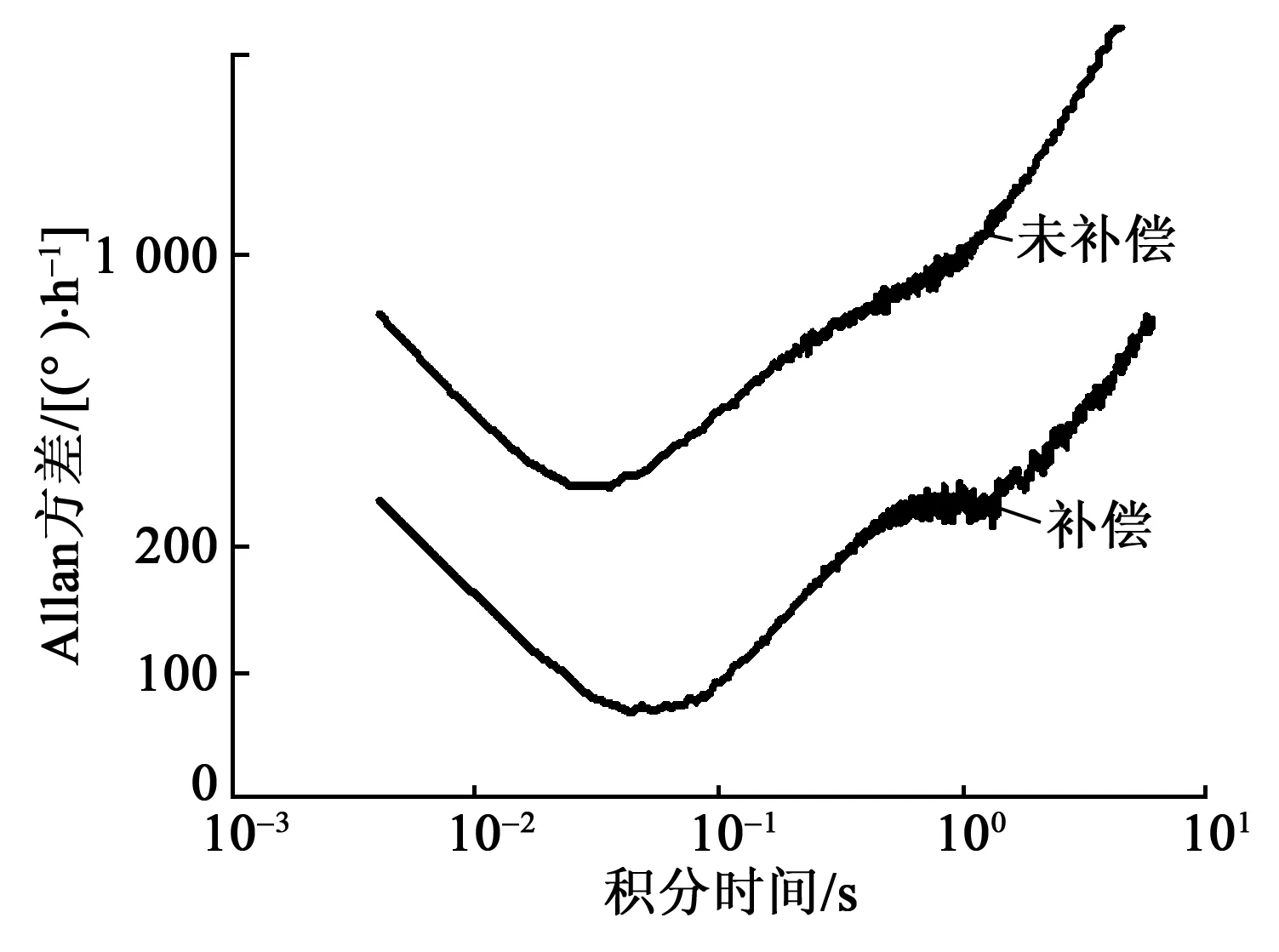
图6 Allan结果对比图
4 结束语
谐振式光学陀螺系统通常使用半导体激光器作为激光光源,但该类激光器存在功率波动问题,会影响陀螺系统的随机游走系数和标度因数非线性度,根据解调曲线公式仿真发现光功率波动解调曲线中心点保持不变,所以在进行激光器频率锁定时,设置锁频点为一固定值,但实际中发现解调曲线中心点随光功率改变,根据陀螺系统各光学器件特性分析其原因是激光器的功率波动受Y波导调制器的残余强度调制的影响,从而将改变陀螺系统的解调曲线中心点,使其不再保持恒定,则此时锁频点将不再为谐振频率,陀螺输出路将出现低频漂移,为抑制该问题,本文利用光功率与解调曲线中心点存在线性关系对其进行标定,实时补偿锁频点,使其始终处于谐振频率对应值,去除了输出路低频漂移,实验测得陀螺输出路零偏稳定性为80 (°)/h,该方法效果显著,实用性强。