波浪能发电平台系泊系统耦合动力响应及水动力分析❋
2019-02-21史宏达董晓晨何京可
冯 亮, 李 昕, 史宏达, 韩 治, 董晓晨, 何京可
(中国海洋大学工程学院,山东 青岛 266100)
近几年来,波浪能的利用已经成为世界各国关注的热点问题[1]。本文课题项目选址于山东省日照市以东50 n mile的黄海冷水团海域。为了满足我国黄海冷水团海域绿色养殖发展对清洁能源的实际需要,更好的利用清洁能源,为三文鱼(Oncorhynchus)生长提供安全、适宜的生长环境,提高养殖生产效率,实现极端海况条件下的安全自动化生产,为平台网箱系统提供更加稳定的能源供应。本文利用点吸收(振荡浮子)技术[2],设计了一种新型波浪能发电平台,并对平台整体结构进行了水动力分析和耦合动力分析。
针对海洋平台系泊系统耦合运动响应及水动力分析这一问题,国内外许多学者都进行过深入研究。Feng Heng等[3]运用MOSES程序系统,对深水半潜式钻井装置的运动性能和系泊系统进行了分析;Shan Ma 等[4]基于异步耦合算法,对浮式平台及其锚泊系统的动态耦合分析进行了数值模拟,将模拟结果与Spar平台商业软件模拟结果进行了对比,验证了其数值模型的可靠性;Yougang Tang等[5]在前人研究的理论基础之上,对深水中的锚泊系统进行了深入的研究;Zhaochen Sun等[6]研究了在浪和流的作用下,深吃水多杆型平台及其系泊系统在时域范围内的耦合动力响应;Jiayang Gu等[7]研究了张力腿平台在随机波浪下的耦合响应;徐刚和段文洋[8]基于Rankine源的边界元法,针对半潜式平台的波浪绕射问题,进行了时域模拟;刘灶和陈超核[9]在时域范围内,分别计算了张紧式系泊系统和悬链式系泊系统耦合运动响应并进行对比分析,发现深水环境中,采用张紧式系泊较好;赵晶瑞等[10]基于集中质量法,建立了系泊缆的柔性计算模型,分析了海流流速及缆绳与海底摩擦对系泊缆动态张力的影响。
在前人的研究基础之上,本文分别采用基于三维势流理论[11]的水动力软件Sesam和基于有限体积法的Flow3D软件对平台和发电浮子进行水动力分析,然后应用Orcaflex软件,建立数值模型,在频域范围内,对平台及其系泊系统进行耦合动力响应研究,分别分析了平台在自存工况和作业工况下的运动响应。
本文所研究的平台与传统的海上作业平台最大的不同点在于:在设计时,利用了点吸收(振荡浮子)技术,安装了发电浮子,作为该平台的捕能系统,捕能系统依靠浮子在波浪中的上下运动,将波浪能转化为机械能进而转化为电能来进行发电。
1 平台结构参数
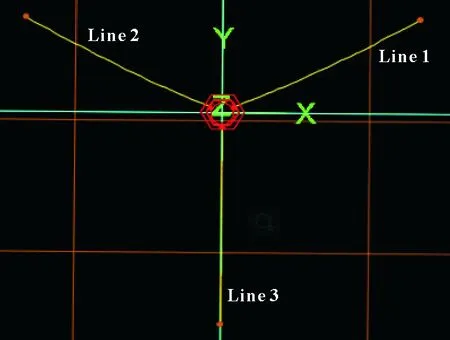
该平台由六角形甲板、立柱、浮筒、发电浮子、斜撑以及下层垂荡板构成(见图1),平台主尺度参数见表1。系泊系统采用半张紧式,选用3根系泊缆对称的布置形式,系泊系统具体布置情况如图2所示。选择R4 ABS-DNV 60规格的无档锚链,锚链长度为135 m,直径为0.06 m,破断强度为3 867 kN,湿重为72 kg/m。
2 水动力分析
2.1 平台势流基础下的水动力分析
本文根据计算平台的主尺度及结构参数,分别建立了波浪能发电平台和发电浮子在Sesam中的水动力

图1 平台结构模型
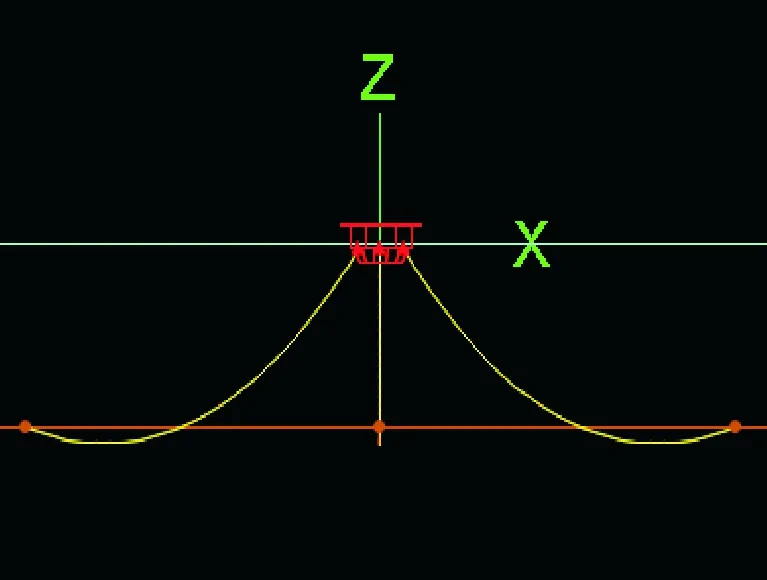
a 系泊系统侧视图
b系泊系统俯视图
项目①特征②尺度③/m 主甲板(六边形)④边长⑤9.00立柱⑥高度⑦直径⑧6.301.92长浮筒⑨长度⑩直径⑧14.001.92短浮筒长度⑩直径⑧9.001.92斜立柱直径⑧1.92垂荡板(十二边形)边长⑤3.81发电浮子底圆直径⑧3.6发电浮子高度⑦2.3垂荡板距浮筒中心线距离4.00
Note:①Project;②Feature;③Scale;④Main deck (hexagonal);⑤Side length;⑥Column;⑦Height;⑧Diameter;⑨Long float;⑩Length;Short float;Oblique column;Heave plate (twelve-sided);Bottom circle of power generation float;Power generation float;Distance between the heave plate and the centerline of the float;Distance
简化模型(见图3),发电浮子的水动力模型如图4所示。然后运行Sesam-HydroD模块分别对平台和发电浮子进行水动力分析。
本文计算选取的浪向角为0°~90°,间距15°,工作水深50 m,通过计算得到平台6个自由度的RAO响应如图5所示。
从图5中可以看出,平台的垂荡运动对波浪方向并不敏感,各方向下的运动响应趋势基本相同,在波浪周期为18 s左右时出现最大峰值,而一般情况下,常规的波浪周期为6~14 s,可见平台垂荡响应的固有周期在常规波浪周期范围之外,因此,平台具有良好的垂荡性能,能避免与波浪发生共振;纵荡和横荡、纵摇和横摇的运动响应趋势基本一致,这是由于平台的结构对称性决定的。在波浪顺浪(0°)入射时,平台的主要的运动模态为纵荡、纵摇以及垂荡;在90°横浪入射时,平台的主要的运动模态为横荡、横摇和垂荡;平台的横摇和纵摇运动都在波浪周期为5 s左右时,出现最大峰值,平台波频运动较大,实际设计中需要引起足够重视。
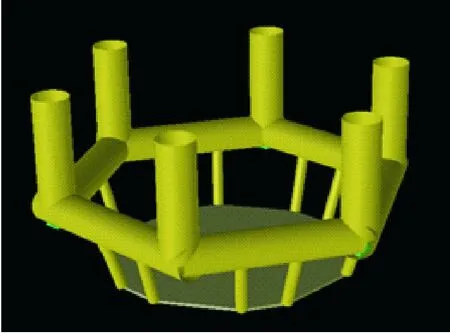
图3 平台水动力简化模型

图4 发电浮子水动力模型
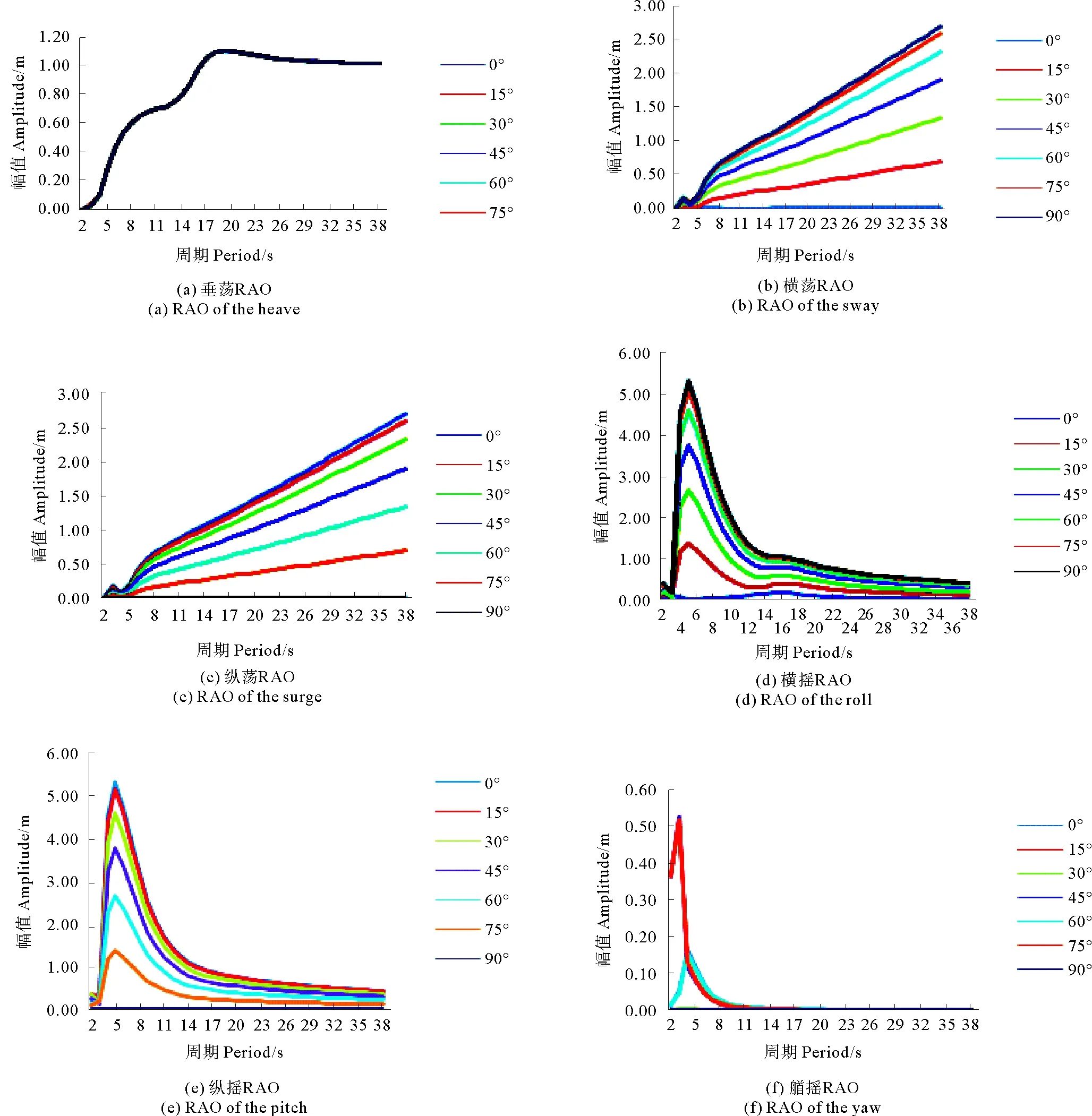
图5 平台6个自由度的RAO响应
由于本文所研究的平台主要依靠平台和发电浮子的相对运动进行发电,因此,在分析平台发电性能时,本文将主要分析平台和发电浮子的垂荡运动响应,分别提取平台和发电浮子的垂荡运动响应数据,得到平台和发电浮子垂荡运动响应曲线(见图6)。从图6中可以看出,发电浮子垂荡运动的固有周期在4 s左右,平台垂荡运动固有周期在18 s左右,而一般的常规波浪周期在6~14 s左右,可见,正常海况下,平台与发电浮子垂荡运动相对幅值满足捕能系统的发电需求。
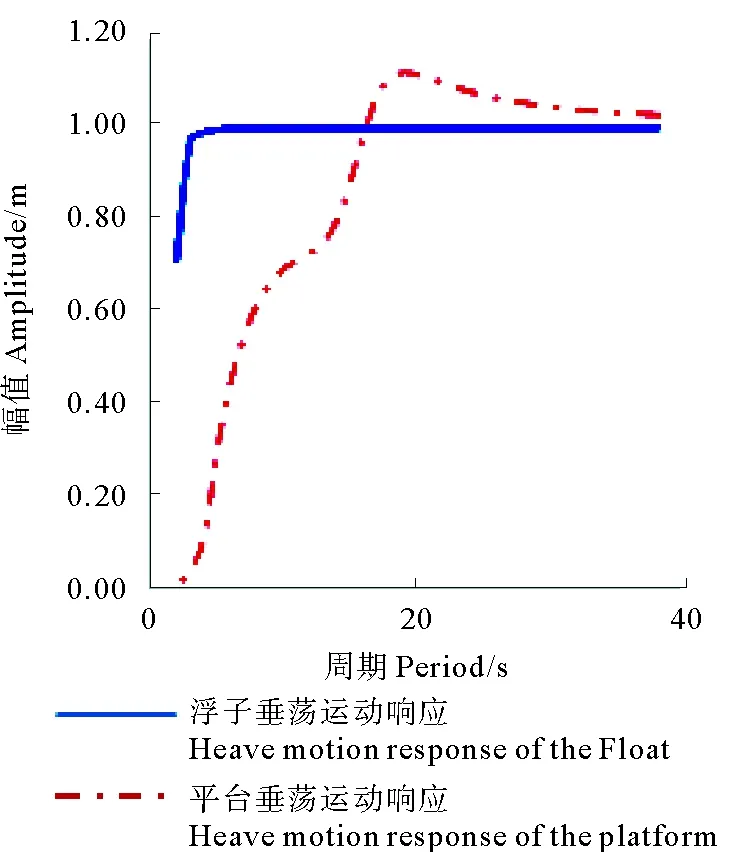
图6 平台和发电浮子垂荡运动响应结果
2.2 平台有限体积法的水动力分析
根据计算平台的主尺度及结构参数,建立了波浪能发电平台与发电浮子在Flow3D中的水动力模型。然后利用有限体积法对其进行水动力分析,平台数值水槽及装置模型如图7所示。数值计算中流体类型假设为黏性不可压缩流体,控制方程采用连续性方程及雷诺平均NS方程,为了精确模拟装置与波浪间的湍流作用,仿真选用了RNGk-ε模型。
数值水槽的左侧选取了Flow3D自带造波边界、右侧和底侧采用了无剪力墙边界,两侧选取对称边界,顶部采用压力边界,其数值设置为一个标准大气压。水槽右侧黄色区域为阻力消波区。水槽水深设置为20 m,入射波采用规则波,周期6 s,波幅0.65 m。将计算得到的浮子的垂向位移和平台垂向位移相减,得到了浮子与平台的相对运动时程图(见图8),从图8中可以发现,平台和浮子运动平稳后,浮子与平台相对运动振幅在0.3~0.4 m间,满足发电需求。

图7 平台数值水槽及装置模型图

图8 平台与浮子相对运动时程图
3 时域耦合分析
根据黄海冷水团工程示范海域资源调查工作所得资料,自存工况环境荷载采用10年一遇有效波高6.1 m,详细数据如表2所示。作业工况选用黄海海域年平均有效波高1.3 m,详细数据如表3所示。本文假定风浪流作用在同一方向上,分别以与坐标成0°、30°、60°和90°四个方向进行计算。分别分析了平台及其系泊系统在自存工况和作业工况2种工况下的耦合运动。
3.1自存工况时域耦合分析
根据API RP 2SK[12]设计规范,采用动力分析计算时,对于完好的系泊系统,系泊缆最大张力的安全系数取1.67,其中系泊缆最大张力安全系数指系泊缆破断强度与所受最大张力的比值。对1中初步设计的系泊系统以自存工况进行4个方向的时域耦合分析,模拟计算时间为3 h,下面仅选取平台纵荡、横摇、垂荡最大值时的时历响应结果以及系泊缆最大张力的时历响应结果(见图9),平台自存工况下的运动响应结果(见表4),系泊缆张力响应结果见表5。

表2 平台自存工况环境条件
Note:①Water depth;②Wave spectrum;③Effective wave height;④Peak period;⑤Wind spectrum;⑥Average wind speed;⑦Surface flow rate

表3 平台作业工况环境条件
Note:①Water depth;②Wave spectrum;③Effective wave height;④Peak period;⑤Wind spectrum;⑥Average wind speed;⑦Surface flow rate
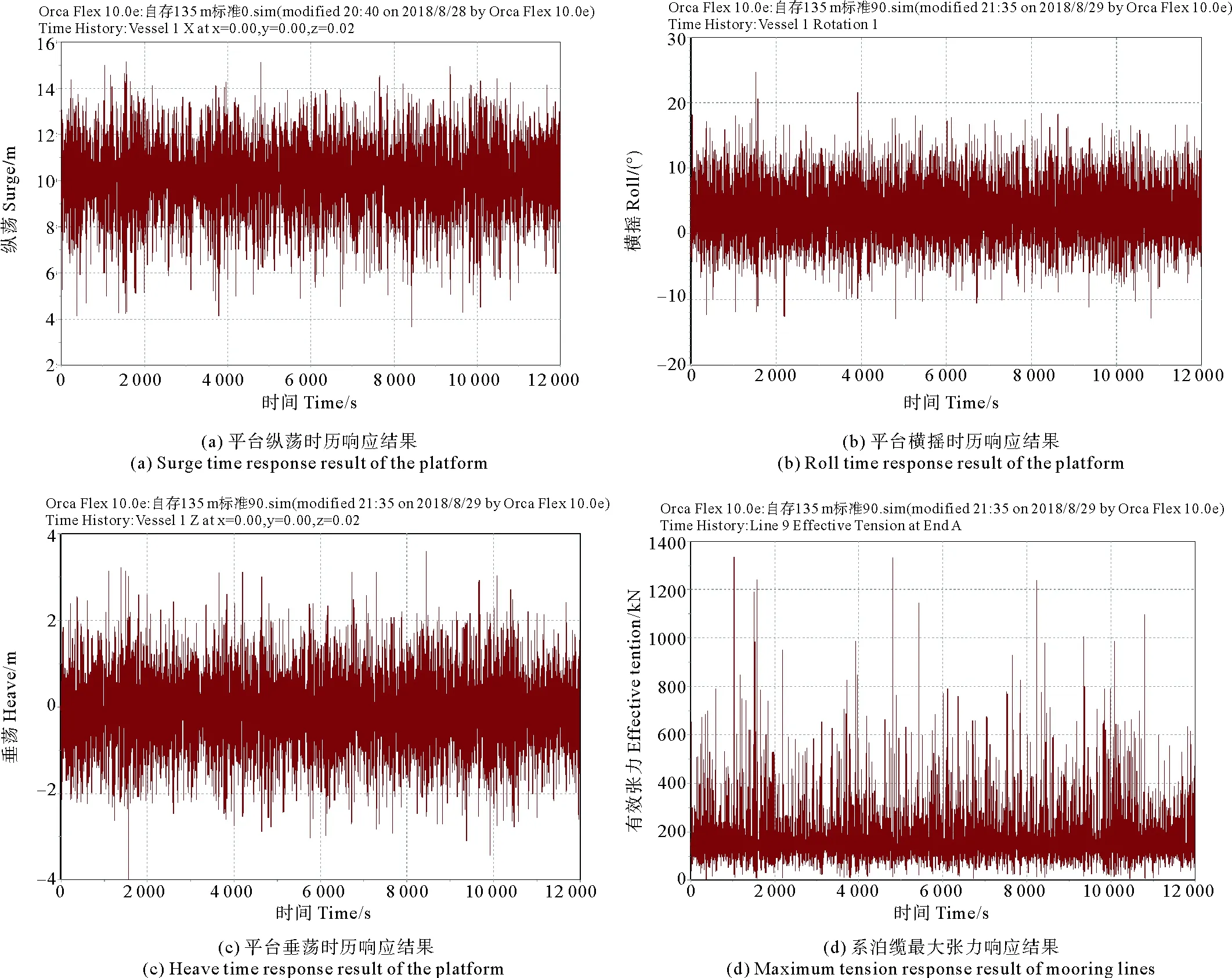
图9 自存工况下平台耦合运动时历响应结果

环境力方向①/(°)纵荡②/m横荡③/m垂荡④/m横摇⑤/(°)纵摇⑥/(°)艏摇⑦/(°)015.177.773.9510.4226.793.953014.469.873.9517.2921.229.986011.4610.913.9322.0616.049.18904.1311.483.9824.6711.692.79
Note:①Direction of environmental force;②Surge;③Sway;④Heave;⑤Roll;⑥Pitch;⑦Yaw

表5 自存工况下平台系泊缆张力响应结果
Note:①Direction of environmental force;②The most stressed mooring;③Maximum value;④Average value;⑤Safety factor
从表4中可以看出,垂荡运动响应变化并不明显,对波浪方向不敏感;平台纵荡和纵摇运动响应具有相似的变化趋势,都在0°浪向时,运动响应值最大;横荡和横摇运动响应变化趋势与纵荡和纵摇运动响应变化趋势正好相反,在90°浪向时,运动响应值最大;艏摇运动在30°浪向时,运动响应达到最大值,运动响应变化趋势没有规律性。由于本文所研究的平台与传统的半潜式平台在功能和作业海况方面存在很大差异,极端海况时,平台处于张紧式,依靠系泊缆自身的弹性将平台控制在一定范围内,工作海域10年一遇海况下的最大水平位移会受到自身系泊缆的长度的影响。因此,自存工况下,本文只考虑锚泊线的安全系数是否符合规范要求。从表5可以看出,锚泊线的安全系数均大于API RP 2SK规范规定的1.67,平台最大锚链张力出现在Line3,安全系数为2.89,满足API规范的要求。因此,平台具有良好的安全性能,能够适应恶劣的海洋环境。
3.2 作业工况时域耦合分析
作业工况下,主要依靠平台和发电浮子的相对运动将波浪能转化为机械能进而转化为电能进行发电。本节计算的重点是平台在不同浪向作用下的运动响应。主要从以下两个方面对新型波浪能发电平台的运动响应进行分析:(1)不同浪向下,新型波浪能发电平台的运动响应特点;(2)不同浪向对新型波浪能发电平台的发电性能的影响。将设计好的系泊系统以作业工况进行4个方向的时域耦合分析,模拟计算时间为3 h,下面仅选取平台纵荡、横摇、垂荡最大值时的时历响应结果以及系泊缆最大张力的时历响应结果(见图10),平台作业工况下的运动响应结果(见表6)。
从表6中可以看出,平台6个自由度的运动响应趋势变化与自存工况所对应的自由度的运动响应趋势变化类似;平台垂荡运动响应对波浪方向变化并不敏感,说明,在作业工况下,平台的捕能系统不受波浪方向变化的影响,捕能系统能够满足发电需求。作业工况时,平台系泊系统处于悬链线式,由于通常情况下,平台的纵荡和横荡的运动幅值小于水深的6%,所以,本文计算的新型波浪能发电平台的运动幅值是满足要求的。

表6 作业工况下平台运动响应结果
Note:①Direction of environmental force;②Surge;③Sway;④Heave;⑤Roll;⑥Pitch;⑦Yaw

图10 作业工况下平台耦合运动时历响应结果
4 结论
本文通过对一新型波浪能发电平台及其系泊系统进行耦合动力响应及水动力分析。其中利用了SESAM软件及Flow3D软件从不同角度对平台进行了水动力分析,并应用Orcaflex软件对平台及其系泊系统进行耦合动力分析。由于该平台与传统半潜式平台在工作水深、尺寸、重量以及功能方面存在很大不同。因此,在对平台进行水动力分析和系泊系统耦合动力分析时,分析的角度不同,分析时依据的标准不同。最终,本文得到以下结论:
(1) 该平台6个自由度的水动力响应曲线的变化规律与实际情况吻合。90°浪向下,主要的运动模态为横荡和横摇;0°浪向下,主要的运动模态为纵荡和纵摇;平台垂荡运动的RAO响应对波浪方向并不敏感。
(2) 在正常海况下,平台与发电浮子垂荡运动相对幅值满足捕能系统的发电需求。
(3) 自存工况下,平台锚泊线的安全系数符合规范要求。说明平台具有良好的安全性能,能够适应恶劣的海洋环境。
(4) 作业工况下,平台垂荡运动响应良好,捕能系统不受波浪方向变化的影响,能够满足发电需求。