车载激光点云中道路路灯提取方法
2019-02-20,,,,,,
,,,, ,,
(1.齐鲁交通发展集团有限公司,山东 济南 250101; 2.齐鲁交通发展集团青临分公司,山东 潍坊 262500;3.济南北方交通工程咨询监理有限公司,山东 济南 250023; 4.山东交通学院 交通与物流工程学院,山东 济南 250023;5.山东科技大学 测绘科学与工程学院,山东 青岛 266590)
路灯是道路环境中的重要组成部分,道路两侧路灯信息对于智慧城市建设、交通运维和市政管理等具有重要意义[1]。利用传统测绘技术进行路灯信息采集需要耗费大量人力、物力和财力,且效率低下,更新周期长。车载移动测量系统高度集成了激光扫描仪、全球卫星导航系统(global navigation satellite system,GNSS)接收机、惯性测量单元和全景相机等传感器,可以快速获取道路及两侧地物高精度、高密度的三维激光点云数据,为路灯信息的快速采集提供了新途径[2]。
目前对于车载激光点云的研究多集中在道路边界、路面和建筑物[3-5]的提取,而路灯的提取常归类为杆状地物提取[6-8],关于其精细分类研究较少。针对路灯的精细提取,国内外学者也做了一些研究,主要可分为3类:①基于散乱点云聚类的方法[9-12],该方法首先通过地面滤波去除地面点的干扰,然后对点云进行聚类得到单体化地物点云,根据地物的几何特征及图像分割思想实现路灯的准确提取;这种处理方法虽然可以直接对散乱点进行处理提取出路灯,但数据处理效率难以保障,且提取出路灯单体后并未进行具体类型识别的研究。②基于三维格网进行处理的方法[13-14],该方法首先对点云数据建立三维格网,然后根据地物的特性分别计算格网内与邻域格网点云的高度、法向量和强度等特征信息,利用空间上下文语义信息提取出路灯等特征地物;以三维格网的形式管理激光点云,提高了数据搜索和处理效率,且对于数据完整性要求不高,但并未对路灯做具体分类。③基于模板匹配的方法[15-16],该方法根据路灯外形尺寸及骨架线建立先验样本,然后将样本与候选路灯进行匹配实现路灯的提取与分类;这类方法虽然可以实现不同类型路灯的分类,获取路灯的位置和尺寸等参数,但对于候选路灯的提取方法研究不足,只在路灯竖直程度较为理想的情况下试验效果较好,实际上候选路灯的提取是实现路灯精确分类的重要前提。
散乱点云法和三维格网法目前应用较多,但这两种方法对路灯的分类效果不甚理想;基于模板匹配的方法可达到较好的分类效果,但分类前对路灯的提取只在噪声地物较少、路灯较为竖直的情况下效果较好。在实际点云数据中,噪声地物干扰严重,路灯存在歪斜情况,上述三类方法在提取时未充分挖掘路灯点云在二维平面及三维空间中呈现的几何形态,只针对路灯自身参数进行研究,未分析同一场景中各路灯之间存在的统计规律,路灯提取准确率总体有待提高。针对上述问题,本研究提出一种车载激光点云中路灯提取方法,充分挖掘路灯自身二三维几何形态信息及各路灯特征的统计规律,实现路灯准确提取与灯头类型识别。
1 路灯提取方法
如图1(a)所示,路灯、行道树和交通信号灯等被统称为杆状地物。根据道路照明要求规范,灯头长度不大于路灯整体高度的1/4,路灯安装的整体高度要高于分布在同侧的行道树和交通信号灯等,同时灯头长度小于交通信号灯横杆长度[17]。在实际点云数据中,图1(a)中虚线框中的树干、灯杆和交通信号灯支撑柱等,具有如图1(b)或图1(d)所示的空间柱状形态;将柱状部分点云投影到xoy平面后, 可根据点云平面坐标拟合得到符合情况较好的圆(图1(c))或外接圆(图1(e))。本研究将利用灯杆的二三维形态提取杆目标,并进一步依据路灯灯头与行道树树冠的形态差异进行候选路灯的提取,去除树木;最后根据路灯灯头形态模板匹配精确提取路灯。主要技术路线如图2所示。
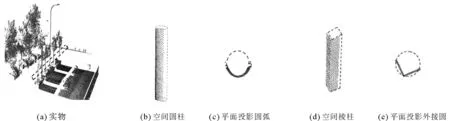
图1 圆柱形灯杆二三维形态分析

图2 路灯提取技术路线
1.1 路灯粗提取
实际道路环境中,道路两侧路灯与行道树、交通信号杆等交错分布,算法需要从原始点云中提取候选路灯(即人造杆目标),去除行道树目标干扰,主要包括3步:地面滤波、杆目标提取和行道树去除。
1.1.1 地面滤波
原始点云中含有大量的地面点,为了减小数据量,提高数据处理效率,同时削弱地面点对候选路灯提取的影响,首先要对原始点云进行地面滤波,得到非地面点。结合本研究的数据索引方法,采用文献[18]的算法进行地面滤波。
1.1.2 杆目标提取
杆状地物区别于其他地物的重要几何特性是杆的柱状形态,深入分析其三维空间分布形态与平面投影近似圆弧形态,提出依据三维空间参数统计规律进行杆目标提取的方法。
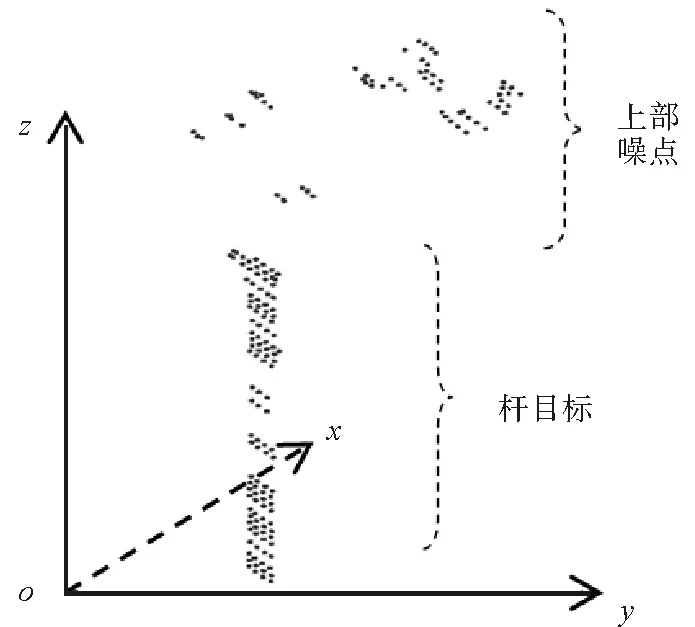
图3 RANSAC提取的杆目标及上部噪点
首先建立三维格网索引,任意一层格网内的杆点云在xoy平面的投影形态,如图1(c)和图1(e)所示,呈近似圆弧状(以下简称圆弧点集);每层圆弧点集形态近似,即圆弧半径近似相等。
然后采用随机抽样一致(random sample consensus,RANSAC)算法[19]进行圆拟合,逐层搜索三维格网中的圆弧状点集。为了提高圆弧状点集搜索的准确性和效率,设置最优圆弧模型的半径小于阈值Rabnormal(根据高杆照明设施技术要求,确定Rabnormal为40 cm[20])。其中,杆目标上部的树冠、交通信号灯横杆和交通标志牌面等噪声点中也有少量圆弧状点集被提取。
最后,通过统计分析进行去噪。如图3所示,杆目标的圆弧呈竖直或近似竖直排列,上部噪点圆弧与杆目标的圆弧差异大。将圆弧按高程升序排列后,获取相邻圆弧间的平面距离Darc、圆弧点集的弦长S、圆弧点集的拱高d。图4为上述3个空间参数的统计直方图,图中3个红色虚线框内均包含的是杆目标部分的圆弧,其对应的3个参数一致性较高,据此准确提取杆目标:

(1)
2) 获取图4(b)中两虚线框内均包含的圆弧点集,作为杆目标点云,以各圆弧圆心的外包圆圆心O(xp,yp)作为杆目标平面位置。
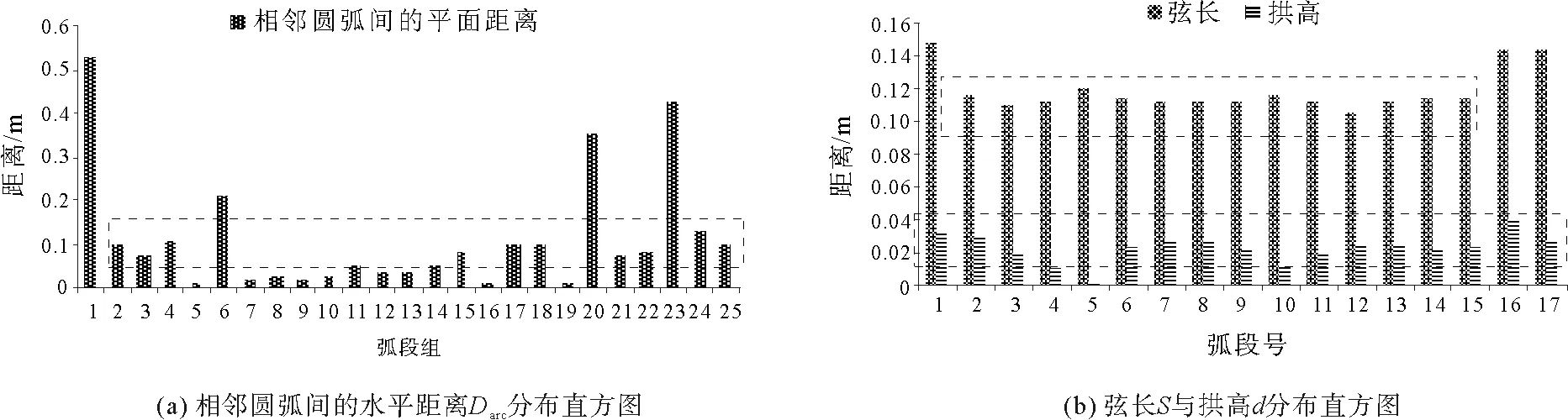
图4 圆弧点集参数统计
1.1.3 行道树去除
提取的杆目标中含有大量树干噪点,行道树与路灯的位置关系存在相离、相邻、灯杆与树冠相交和灯头与树冠相交4种情况,如图5所示。根据树冠和灯头的形态差异,设计了一种多层环形邻域方位覆盖度判别法去除树木,提取候选路灯。
首先进行杆目标上部点云聚类,继续从杆目标点云上端向上聚类生长,提取上部点云目标,包括树冠和路灯灯头;然后将上部点云目标投影到xoy平面,建立二维格网,如图6所示,以杆目标所在的格网为中心,搜索其多层环形邻域中存在点云的格网。统计不同环形邻域上8个方位覆盖度(azimuth coverage,AC),若某个方位上有点云,则该方位的方位覆盖度为1,否则为0。对于图5(a)~(c)所示的情况,树冠和路灯灯头相离,树冠点云至少有4个方位存在点云;路灯灯头只在单一方位上有分布(双向路灯在呈180°的两个方位上有分布)。据此可设置ACn=4,代入公式计算nmax层环形邻域方位覆盖度判断阈值WACT,若WAC
(2)
其中:nmax为环形邻域最大层数,dmin当前杆目标到最近的杆目标距离,dstep为格网尺度,ACn为第n层环形邻域的方位覆盖度。

图5 路灯与树木位置关系

图6 环形邻域方位覆盖度示意图
1.2 路灯精确提取
去除行道树后,候选路灯中还包含少量交通信号灯和交通标志牌等伪路灯。根据实际路灯灯头点云剖面投影形态建立模板库,然后通过模板匹配,实现路灯精确提取与类型识别。
1.2.1 模板库建立
路灯灯头根据其数量和延展方向一般可分为单向路灯和双向路灯。如图7所示,从实际点云数据中提取若干路灯样本,建立模板库。如图8(a)所示,对于每一类路灯,提取其模板参数包括:灯头高度Hh,灯头长度Lh,灯头延伸方向S。然后将灯头点云投影到S和Z轴所在立面,建立二维格网。如图8(b)所示,若格网中有点将格网值设为1,否则格网值为0,据此得到路灯模板立面二值格网。

图7 路灯模板库点云(部分)

图8 路灯模板
1.2.2 模板匹配分类

求得灯头点云x坐标的最大值xmax、最小值xmin,y坐标的最大值ymax、最小值ymin,则灯头延伸方向S=(xmax-xmin,ymax-ymin)。将灯头点云投影到S和Z轴所在立面,建立二值格网。以灯杆与灯头结合点所在格网作为基准,将候选路灯灯头二值格网与模板MB的二值格网叠加,若重叠度(格网值相同的格网数量与格网总数的比值)大于90%,则认为候选路灯与模板类别相同,否则作为伪路灯去除。
2 实验分析
采用Vsurs-Q型移动测量系统采集青岛市黄岛区渭河路、元宝山路、灵山路和滨海大道的实验数据。如图9所示,实验路段1总长度约3.6 km,包含单向和双向2类典型路灯。元宝山路中间为绿化带,双向路灯分布在绿化带中;渭河路和灵山路上的单向路灯亦分布在道路两侧的绿化带中。实验路段1(图9)两侧分布有大量行道树。实验路段2如图10所示,总长度约2 km,包含双向和高杆灯2类路灯,道路中间有护栏,两侧分布有大量行道树、交通信号灯和交通标志牌,路面车辆和行人多。移动测量系统沿双向车道行驶采集数据。
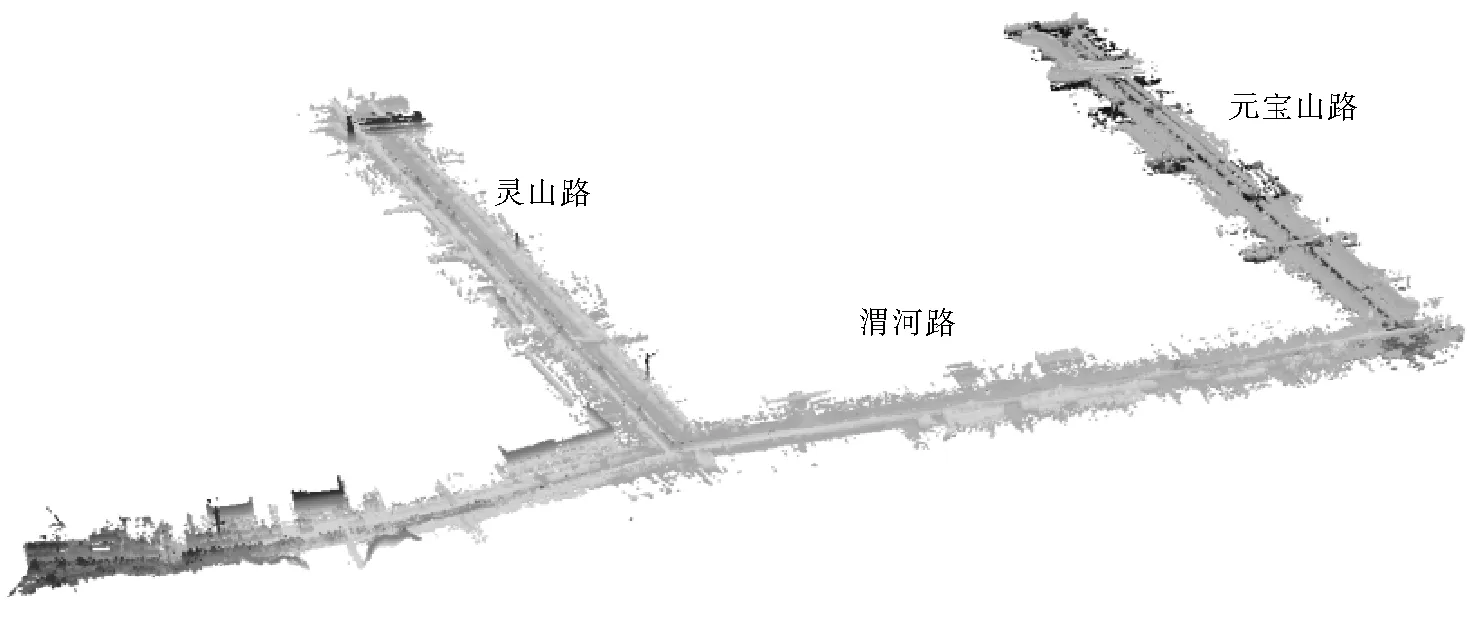
图9 实验路段1车载激光点云数据

图10 实验路段2车载激光点云数据
路段1中路灯提取结果如图11所示。因为本研究采用自下而上的处理方法,先进行地面滤波再利用RANSAC算法提取杆目标,所以由A、B区域的局部放大图可以看出,提取得到的2类路灯形态完好,未受下部绿化带的影响。路段2中路灯提取结果如图12所示。由A、B和C区域的局部放大图可以看出,高杆灯和双向路灯均能被完好地提取出来。图12中A区域和C区域内的双向路灯灯杆中部安装有广告牌,采用RANSAC算法提取广告牌上方与下方的灯杆,然后将灯头点云与模板精确匹配,保证路灯的提取与识别不受灯杆上附属物的影响。

图11 路段1路灯提取结果
由表1可以看出,路灯提取的召回率低于准确率,主要是因为路灯未被提取数量多于错误提取数量。灵山路西侧漏提7个路灯,由于该处行道树茂密,对路灯灯头遮挡严重,获取的路灯点云灯头存在严重缺失,在进行模板匹配时不满足要求,无法被提取;渭河路北侧漏提3个路灯,滨海大道漏提11个路灯,这些路灯距离路边较远,且中间有车辆遮挡,导致路灯点云稀疏且灯杆有小部分残缺,无法通过RANSAC和统计规律提取出灯杆,造成遗漏。由上可知,路灯点云的完整程度和点云数据的密度直接影响遗漏提取的数量,对召回率产生影响。在实验路段中,一些枯萎的树木及旗杆等外形类似于路灯,被错误提取,影响提取准确率。
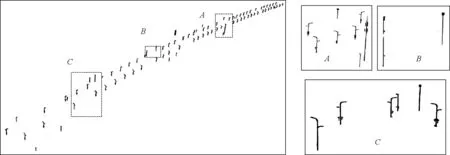
图12 路段2路灯提取结果
实际路段中3类路灯共228个,正确提取204个。由公式(3)计算准确率(Accuracy)和召回率(Recall)对提取结果进行定量评价(表1)。
(3)
其中:TP为正确提取的数量;FN未被提取的数量;FP为错误提取的数量。

表1 提取结果定量分析
从提取结果可以看出,本研究方法对单向路灯提取的准确率为93.94%、召回率为90.29%;双向路灯提取的准确率为95.28%、召回率为89.38%;对高杆灯提取的准确率和召回率均达到83.33%;对路灯的整体提取准确率为94.01%、召回率为89.47%。
为了验证方法的有效性,将本研究方法和同样采用模板匹配的文献[13]的方法进行了重点对比。通过VC++/Qt编程实现2种算法,运用普通台式机运行,电脑配置为:Intel Xeon E3-1230 8核处理器、4G独立显卡、64位操作系统、8G内存。对4条道路点云数据进行路灯提取,2种算法对路灯提取的准确率、召回率和耗时如表2所示。
结果表明,与文献[13]的方法相比,本方法对路灯提取在准确率和召回率方面的提高分别大于3%和8%。这主要是由于实际道路环境中,受自然及人为因素的影响,路灯并不完全竖直,文献[13]采用单列竖直格网粗定位路灯,容易造成歪斜路灯漏提,影响其召回率;由于原始数据中行道树高于路灯并遮挡路灯的情况较多,文献[13]直接提取距离疑似路灯一定范围内的点云数据作为疑似路灯整体点云,容易提取到临近树冠噪点,影响路灯类型判断,降低其准确率。而本方法利用不同层格网中灯杆圆弧形点云存在的统计规律将其提取出来,不受灯杆歪斜的影响;同时,设计了“行道树去除”算法,有效削弱了临近行道树对路灯提取的干扰。因此,相对于文献[13],本方法在路灯提取的准确率和召回率2个指标上均有提高。此外,将本方法与文献[9](散乱点云法)和文献[14](三维格网法)进行了实验对比,文献[9]方法对路灯提取的准确率为83.85%,召回率为87.50%,而本方法对路灯提取的准确率和召回率均优于文献[9];文献[14]对路灯提取的准确率为91.60%,召回率为92.30%,该方法虽遗漏路灯较少,但提取出了更多的噪声地物,所以本方法在准确率方面优于文献[14],召回率略低。
效率方面,本方法比文献[13]方法耗时减少了约36%。主要是由于文献[13]在路灯粗提取时运用了数学形态学闭运算,在匹配提取时进行了缓冲区分析,耗费了大量时间;而本方法仅需利用格网邻域关系进行区域生长粗提取路灯,且在匹配时生成二值图加快了处理速度,总体耗时较少。

表2 本文方法与文献[13]方法对比
3 结束语
针对车载激光点云中路灯的提取,充分挖掘了灯杆的三维柱状特性和二维投影圆弧特性,采用渐进提取分类的策略,首先提取特征较为明显的杆目标,然后利用上部点云形态去除树木干扰,最后根据路灯灯头局部特征进行模板匹配,精确提取路灯。通过实验分析,在目标扫描较为完整前提下,本算法对实际道路环境中常见的单、双向及高杆路灯均具有较好的提取效果,整体提取准确率、召回率分别达94.01%和89.47%,优于其他路灯提取方法。算法直接以散乱点云为处理对象,不需要其他辅助数据,适用性较强。同时,利用格网区域生长和图像匹配的方法进行路灯的粗提取和精确匹配,使本算法较同类算法在路灯提取效率方面有大幅提高。在后续研究中,可通过缩短路灯的扫描距离,保证路灯点云的完整度与密度,以减少遗漏提取的数量;通过引入反射强度等参数进一步区别路灯与其他杆状地物,以减少错误提取数量。
