世界月球探测的发展回顾与展望
2019-02-19卢波
卢 波
月球是地球的天然卫星,也是距离地球最近的天体,是人类开展深空探测的首选目标。从世界航天技术发展进程看,人类正是通过对月球的各种探测活动开辟了航天活动的新疆域,掌握了地外天体的环绕、着陆及巡视、采样返回等太阳系天体探测技术,进而为迈向月球以远其他天体奠定坚实的技术基础。
1 引言
月球探测是人类进行太阳系探索的开端,大大提升了人类对月球、地月空间和太阳系的认识;推动了航天技术的进步,带动了一系列基础科学的创新,促进了众多应用科学的新发展;建立和完善了航天工程技术体系,带动和促进了一系列基础工业技术的快速发展;提升了公众对太空探索和空间科学的认知,产生了显著的技术、经济和社会效益。
截至2018年底,全世界共实施了116次无人月球探测任务,实现了月球飞越、环绕、着陆、巡视和采样返回探测。第一次探月高潮始于1958年,止于1976年,以美、苏两国空间竞赛为标志,重在展示国家实力,开启了人类深空探索的序幕,实现了月球飞越、撞击、环绕、软着陆、表面巡视、无人采样返回和载人登月,其中俄罗斯完成了3次无人月球采样返回,美国实现6次载人登月,获取了前所未有的科学探测成果,促进了大量新兴学科的诞生,一大批科学技术成果广泛应用于经济建设。
月球探测的再度兴起是在20世纪90年代以后,主要航天国家纷纷启动并实施了月球探测活动,截至2018年12月共进行了16次发射(美国6次,中国6次,日本2次,欧洲1次,印度1次)。新一轮月球探测更注重科学驱动和新技术的应用,旨在获得新的科学成果,探测器技术更先进、功能更全、寿命更长。90年代以来的月球探测活动呈现出科学目标明确、参与国家众多、规划长远、成功率高的特征。

全球无人月球探测任务分类统计
2 世界月球探测发展回顾
月球探测几乎和人造地球卫星的发展同时起步。第一代月球探测器的目的很简单:获得足够高的速度、足够的定向精度,使航天器尽可能地靠近月球,甚至降落在月球表面,以便探测月球及其邻近区域,拍摄月球表面图像,并把探测数据和图像发回地球。第二代月球探测器以苏联的月球-10(Luna-10)轨道器、美国的“月球轨道器”、苏联的月球-9着陆器、美国的“勘测者”(Surveyor)着陆器为代表,这些探测器进入月球环绕轨道探测月球、在月球表面软着陆并勘测月球表面地质地貌。第三代月球探测器为月球采样返回任务,目前只有苏联的月球-16、20和24成功实现了无人月球采样返回,共带回月壤样品330g。
月球探测的基本条件是大推力的运载工具、精密的制导导航与控制和远距离通信技术,这些正是航天技术长远发展需要解决的问题,月球探测成为试验这些技术的最好手段和机会,而当时正是美苏“空间竞赛”的初期,美国和苏联都对月球探测表现出了极大的热情。苏联和美国早期发展的月球环绕和着陆探测,主要目的是获取月球地质地貌数据,试验软着陆技术,考察月表的硬度、温度、地形地貌等环境条件,探测月表的元素成分含量及其分布,为载人登月选定着陆位置,并做好技术准备。
20世纪50年代末到70年代中期是月球探测的第一个高潮期,这期间的月球探测以苏联与美国在太空领域的“空间竞赛”为标志,为赢得竞争,这个时期美国和苏联均制定了载人登月计划。苏联在1959-1976年期间共发射了64个月球探测器,取得月球探测的多项第一,主要型号为“月球”(Luna)系列及“探测器”(Zond)系列。苏联的“月球”系列项目取得了巨大的成功,它实现了人类月球探测历史上的多个“第一”:第一个月球探测器(月球-1,1959年1月);第一次月球硬着陆(月球-2,1959年9月);拍摄第一张月球背面图片(月球-3,1959年10月);第一次月球软着陆(月球-9,1966年2月);第一个月球轨道器(月球-10,1966年4月);第一次实现无人月球采样返回(月球-16,1970年9月);第一次月球车巡视勘察(月球-17,1970年11月)。
美国在1958-1973年期间共发射了36个月球探测器,主要型号为“先驱者”(Pioneer)、“徘徊者”(Ranger)、“勘测者”(Surveyor)和“月球轨道器”(Lunar Orbiter),目的是为阿波罗载人登月做前期探索和技术准备。这期间,美国投入大量的人力物力实施了“阿波罗”(Apollo)载人登月计划,于1961年5月-1972年12月向月球发射了7艘“阿波罗”登月飞船,除了阿波罗-13因故障中途返回,其余6艘登月成功,成功将12名航天员送上月球,带回月岩样品380kg,创造了人类航天史的辉煌一页。
20世纪70年代中期到80年代末期,美国和俄罗斯航天战略重点转为发展近地轨道载人航天和空间站,月球探测进入低潮沉寂期,全球约有14年的时间未发射月球探测器。特别是随着苏联的解体,俄罗斯经济发展疲弱,其月球探测活动也进入低潮,从1977年至今有40多年的时间,苏联/俄罗斯再未实施月球探测活动。
1989年7月20日,为纪念“阿波罗”飞船登月20周年,美国前总统乔治·布什提出了重返月球、在月球驻留并以此为基础完成载人火星探测的构想。在此期间,美国、欧洲、日本纷纷组织力量开展研究,并相继提出月球探测计划。其中,日本于1990年成功发射其首个月球探测器“飞天”(HITEN)。随后,美国分别于1994年1月和1998年1月发射了“克莱门汀”(Clementine)和“月球勘探者”(Lunar Prospector)探测器,进而发现月球上有水冰存在的迹象,极大地激发了世界各国开展月球探测的热情,标志着新一轮月球探测活动的兴起。从1994年至今,美国已实施了6次无人月球探测任务,获得了多个重要科学成果,其2009年发射的“月球坑观测与环境感知卫星”(LCROSS)通过撞击月面南极凯布斯坑确认了月球极区水冰的存在,2011年发射的“圣杯”(GRAIL)通过双星编队绘制了迄今最精确的月球引力场图,2013年发射的“月球大气与尘埃环境探测器”(LADEE)验证了地月激光高速传输技术。
进入21世纪,欧洲、日本、中国和印度也相继开展了月球探测。欧洲航天局(ESA)于2003年发射其首个月球探测器智慧-1(Smart-1),首次将电推进技术应用到月球探测任务中,成功验证了电推进技术可用于小型探测任务。日本于2007年发射其第二个月球探测器“月女神”(SENELE),获得了全月球地形图,并通过中继子卫星和重力场子卫星的配合实现了月球背面引力场的测绘。从2007-2018年的十年间,中国成功实施了6次月球任务,其中包括2018年5月和12月分别发射的“鹊桥”通信中继星和嫦娥四号着陆器,实现了月球环绕、月球软着陆、月面巡视、月球飞掠返回再入、地月拉格朗日L2点环绕等多项技术突破。印度于2008年发射其首个月球探测器月船-1(Chandrayaan-1),实现了月球环绕和自旋撞击器对月面的撞击探测。
月球是人类探测次数最多、探测成果最为丰富的地外天体,将成为开展月球以远空间探索的重要前哨。目前,包括新兴航天国家在内的多个航天国家纷纷提出和制定了新的月球探测计划。
3 月球探测的未来展望
月球探测总体发展趋势
2018年2月,国际空间探索协调小组(ISECG)发布了第三版《全球探索路线图》,该路线图反映了人类对空间探索的兴趣与日俱增,未来将通过多次往返地月空间、登陆月球、驻留月球及后续的其他探索任务,为将来的火星探索奠定技术基础和做好准备。未来数十年,月球科学研究、资源勘探及开发利用将是世界主要航天国家的重点发展目标。
(1)无人月球探测与未来载人探索紧密结合,实现月球持续探索和利用
美国和俄罗斯等国均瞄准实现载人月球探测,未来将开展一系列无人月球探测任务,利用月球探测和环境开展核心技术验证,为实现载人登陆火星的长远目标奠定技术基础。
2018年8月,美国国家航空航天局(NASA)公布了未来十年太空探索的新目标计划。根据该计划,NASA新研的“空间发射系统”(SLS)将在2019年底或2020年初执行首次不载人的探索任务-1(EM-1),进行26天的绕月和返回地球,而在2023年的探索任务-2中将发射载4人的“猎户座”(Orion)飞船和太阳能电推进服务舱进入月球轨道,开始“深空门户”(DSG)的建造;在后续的探索任务-3和4任务中,分别把深空居住舱和后勤货舱送到月球轨道。NASA计划于2026年完成“深空门户”第一阶段的建造,可支持航天员30天的在轨驻留和工作,并能支持在月面开展的机器人活动。
2018年9月,NASA发布了《国家太空探索活动报告》,规划了从近地轨道到月球再到火星的载人探索路线图。该报告提出了美国未来太空探索的5个战略目标:①将“以政府投资为主导的近地轨道载人航天活动”转向“以私营为主的商业载人航天活动”;②领导并开展月球表面活动,提升执行地月空间以远任务的能力;③通过一系列机器人任务促进对月球资源的科学勘察和利用;④实现美国航天员重返月球,并进行持续探索和利用活动;⑤在月球上验证载人火星和其他目的地任务所需的能力。
(2)月球资源勘探和开发利用是未来发展的热点,从科学探索向勘探应用发展
20世纪90年代以来,主要航天国家在推进月球探测活动的同时,还开展了月球原位资源利用(ISRU)技术的研究。利用月球固有的矿产资源,满足月球基地建设对基础性原材料的需求,成为未来月球开发与利用的重要内容之一。月球探测的下一步仍是利用先进机器人技术、先进钻岩技术、先进测量分析技术等对月球资源及其蕴藏量进行全面深入的勘察,为载人登月和建立月球基地获取重要的数据资料。
目前,美国、欧洲、俄罗斯、印度、日本等均制定了月球着陆探测计划,2019-2025年将实施多个月球着陆任务。预计未来数十年,各航天大国将在月球资源的勘探、开发利用和科学探索方面展开激烈竞争。
(3)未来无人月球探测任务重点聚焦月球背面、极地以及水资源和矿藏
月球探测将以月球资源、能源和特殊环境利用以及通过月球走向更远深空为目标,并且利用月球特殊的环境条件开展天文观测、空间科学研究和技术试验验证等。

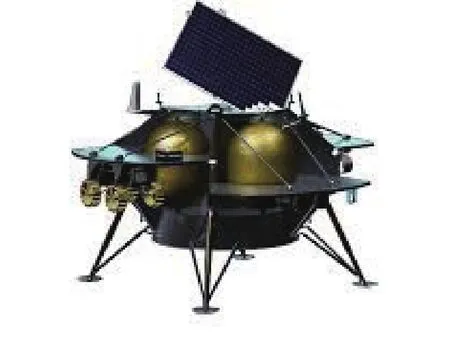
月球-27着陆器和巡视器
从发展趋势看,未来数年月球探测活动将主要针对以前探测较少的月球背面和月球极区展开深入的探测和研究。目前,只有美国、俄罗斯和中国实施了月球软着陆任务。在NASA的未来空间探索规划中已将“月球南极艾特肯盆地采样返回”列为“新疆域”计划的第4项任务的备选项目。俄罗斯提出的新探月计划中,将探测重点瞄向月球南极,计划向月球南极发射着陆器,以及实施月球采样返回任务。欧洲积极发展月球极区着陆技术,计划与俄罗斯合作实施月球-27极区着陆/巡视任务,勘探月球极区资源。日本正着力发展月球精确着陆技术和月球机器人技术,旨在开展月球资源环境勘察和利用。
(4)商业化月球探测活动将迅速成长
美国新任总统特朗普2017年12月签发的1号航天政策令中,要求NASA“引入商业航天,开展国际合作,继续引领创新和持续的太空探索计划”。实际上, NASA早在2014年1月就发布了“月球货物运输与软着陆”(CATALYST)倡议,向私营航天机构征求实施建议方案,目的是推进美国商业化探月能力建设,实现月球科学价值研究与潜在资源勘探,演示验证载人深空探索技术,为载人探测火星奠定技术基础。NASA在该倡议中指出,月球拥有巨大的科学研究价值与资源挖掘潜力,可用于支撑载人深空探索。
2014年5月,NASA宣布将通过与商业公司的合作实施月球着陆计划,并选择了3家美国公司进行月球着陆器的开发。这3家公司分别是美国月球快车公司(Moon Express)、宇宙机器人技术公司(Astrobotic Technology)和马斯腾空间系统公司(Masten Space System)。基于合作协议,NASA将用3年的时间向这3家公司提供专项技术、试验设施,以及出租测试设备和提供测试软件,以帮助这些公司尽快完成月球着陆器的开发。
2015年11月,时任美国总统奥巴马签署通过了《美国商业航天发射竞争法案》(CSLCA),允许美国企业拥有、运输、使用和出售从月球、小行星或其他宇宙天体获取的资源,并鼓励商业公司探索和利用星际资源。这无疑又为美国的商业公司开展月球等深空技术开发打了催化剂。2016年8月,美国月球快车公司获得了美国联邦航空管理局(FAA)颁发的向月球发射着陆器的许可证,这是美国政府首次批准私人公司向地球轨道以远发射航天器。
月球快车公司的月球着陆器是一个具有灵活性的、可扩展的探测平台,可支持进行月球勘探采矿、采样返回、月球科学研究和商业探测活动,其首个MX-1E月球着陆器计划在2019-2020年发射。美国宇宙机器人公司推出了“游隼”(Peregrine)月球着陆器,可向企业、政府、大学和科研机构等提供有效载荷空间进行月球探测和研究,计划2020年进行首次发射。美国马斯腾空间系统公司开发了XL-1月球着陆器,预计2021年发射。
“游隼”月球着陆器
美国NASA于2018年9月公布了“商业月球有效载荷服务”(CLPS)的最终招标文件,美国月球快车公司、宇宙机器人公司和马斯腾空间系统公司均提交了投标方案。2018年11月,NASA宣布有9家公司获得了CLPS竞标资格,除了包括上述3家公司外,另6家公司是深空系统公司(Deep Space System)、德雷珀公司(Draper)、超越轨道公司(Orbit Beyond)、直觉机器公司(Intuitive Machines)、萤火虫宇航公司(Firefly Aerospace)和洛马公司(LM)。NASA表示,首批CLPS月球任务预计将在2020年发射。可以预见,在未来空间探测活动中,商业民营公司、非政府机构的空间探测活动将呈现活跃和快速发展的态势。
主要航天国家未来月球任务规划
各主要航天国家对于月球探测的未来目标都基本明确,即全面考察月球的矿物分布,发掘、开发和利用月球资源,建立深空探测前哨基地,以及利用月球有利的自然条件开展空间科学研究、天文观测和技术验证试验。
(1)美国重启登月计划,为载人登陆火星和探测其他目标奠定基础
2017年,新一任美国总统特朗普再次重新调整了美国的载人探索战略,取消了奥巴马时期的载人登陆小行星项目,强调美国未来要致力于维持在全球太空领域的领导地位,并宣布美国将重启载人登月计划,在21世纪结束前实现太阳系载人探索目标。美国和俄罗斯在2017年9月签署了联合声明,将合作建造“深空门户”月球轨道空间站,将其作为国际合作探索月球表面和更远深空的门户和前哨站。
2018年2月NASA发布《2018年战略规划》,描述了NASA未来空间探索发展的整体战略。根据新版战略规划,NASA未来几年实施的相关计划包括“猎户座”飞船系统、空间发射系统、载人研究、“深空门户”月球轨道平台、先进的地-月空间和月球表面能力、先进探索系统、月球发现和探索任务计划、探索任务地面系统,等。按照新的战略规划,NASA未来将积极推进发展商业化的月球软着陆能力,并通过该项举措建立NASA与商业宇航工业界以及国际合作伙伴之间的桥梁。NASA表示,将从2019年开始采购商业月球有效载荷服务,实现月球表面端到端的有效载荷运送。
随着立方星技术在地球轨道的快速发展,美国、欧洲等国家和组织计划在月球轨道部署立方星式的月球探测器,旨在以低成本的方式开展月球背面、月球水冰、月球矿物等月球资源及月背环境勘察。美国NASA目前在研的“猎户座”飞船,其首次探索任务-1将搭载13个立方星,其中包括NASA进行月球环境和资源探测的立方星,分别是“月球氢测绘仪”(LunaH-Map)、“月球冰立方”(Lunar IceCube)、“月球闪光”(Lunar Flashlight)和“月球红外”(LunIR),它们将装备当今先进技术的科学载荷对月球资源的丰度、成分和位置分布开展探测。这些立方星将通过不同的方式测绘月球南极区域土壤的氢含量,探测月球水冰分布及寻找其他矿物资源,以支持未来的载人月球任务。

“月球氢测绘仪”

“月球冰立方”
“月球闪光”
(2)欧洲将与俄罗斯合作实施月球极区着陆,并提出建造月球基地构想
在月球探测领域,欧洲和俄罗斯都强调国际合作,都表示出建造月球基地的想法。国际合作仍然是欧洲开展空间探测活动的主要方式之一。欧洲2016年提出了“国际月球村”的构想,倡议多国航天机构合作,认为月球基地将引发新一轮技术创新,包括就地取材,利用3D打印技术建造月球基地等技术。此外,欧洲未来的月球探索策略还包括利用立方星技术开展可负担的月球资源及环境探测;发展商业化的月球探测支持能力(月球任务通信中继等);以及运用从近地轨道任务发展的载人设施(国际空间站和自动转移飞行器等)和技术能力参与NASA牵头的“深空门户”计划。2018年7月,ESA与NASA商讨了未来载人月球探索中的合作意向。
目前,欧洲正在开发“领航者”(Pilot)月球着陆系统,并与俄罗斯达成了协议,双方将在月球着陆项目上展开合作,将合作实施月球-27极区着陆/巡视任务,该任务将在月球南极艾特肯盆地着陆,欧洲将提供着陆系统以及一套样品钻取、采集、处理和分析的装置。在发展深空探索立方星方面,ESA在2017年发布公告向科研机构、大学和工业界征集“可实现的探索月球立方星任务”方案。2018年3月,ESA公布了最终获胜的两个方案,一个是“月球微流星撞击轨道器”(Lumio),将在月球背面上方绕行,探测月球夜间微流星撞击闪光,获取微流星撞击月面的图像数据;另一个是“月球挥发物和矿物学测绘轨道器”(VMMO),将观测月球南极附近永久阴影区的火山口,搜寻水冰物质和沉积物,测量月球辐射等。ESA表示,两个获胜团队的立方星月球任务未来有望搭载美国2019/2020年“猎户座”飞船的探索任务-1或商业公司的月球任务进行发射。
(3)俄罗斯未来10年空间探测以月球为重点,计划2050年前完成月球基地建造
俄罗斯于2016年正式出台了新的10年规划《2016-2025年联邦航天发展规划》,部署了未来10年俄罗斯航天活动的发展路径和策略,该规划明确了俄罗斯未来将重点开展机器人月球探测,并继续开展“火星生物学”(ExoMars)国际合作火星项目。俄罗斯还提出了建设月球基地的长远计划,2017年10月,俄罗斯能源火箭航天集团宣布,计划于2040-2050年建成月球基地。
俄罗斯在新10年规划中提出了将实施“绕、落、回”月球探测任务,并计划在2019-2025年期间发射4次月球任务,分别是2020/2021年的“月球-水珠”(Luna-Glob)着陆任务、2021/2022年的“月球-资源”(Luna-Resurs)环绕任务、2023年的“月球-资源”着陆任务、2024年后的“月球-土壤”(Luna-Grunt)采样返回任务。但就目前俄罗斯经济发展形势和国际大环境判断,规划的“月球”系列探测器任务实施时间仍难确定。
(4)日本着力发展月球精确着陆技术,计划参与国际月球任务
日本宇宙航空研究开发机构(JAXA)原计划2019年发射“小型月球探测着陆器”(SLIM),现推迟到2021年发射,目的是验证月面精确着陆技术。日本未来将着力发展月球精确着陆技术和机器人探测技术,实施月球着陆任务,开展月球环境探测和月球资源勘察;积极开展国际合作,日本和印度已达成合作意向,未来将在月球极区探测、月球表面巡视和采样返回任务方面展开合作;计划参与NASA牵头的“深空门户”项目和国际载人月球任务;发展月球机器人技术,提出将打造用于建造和服务月球基地的各类月球表面机器人,开展月球资源勘探和利用活动。
在NASA的“猎户座”飞船的探索任务-1中,日本也计划搭载一颗由JAXA和东京大学联合研制的立方星“小马座”(EQUULEUS),它采用离子推进技术,任务目的是验证采用纳卫星飞往地月拉格朗日L2点的轨道控制技术。
(5)印度、韩国、巴西等国家也积极谋划和推进月球探测活动
印度始终将深空探测作为国家科技发展和创新的重要途径,计划在2019年3月发射月船-2(Chandrayaan-2),这是印度的第二次月球探测,任务目标是实现月球环饶、着陆和巡视探测,其第二次探月任务将以本土化为主,印度未来还将根据技术进展情况实施月球采样返回探测。
韩国在2013年公布了“2040太空计划”,2018年2 月又通过了《第三次航天开发振兴基本计划》,将韩国探月活动由原“绕、落、回”三个阶段调整为“绕”和“落”两个阶段,时间上也大幅延后。目前,韩国已启动了月球探测工程的第一阶段“绕”的研制工作,计划在2020年采用美国SpaceX公司的运载火箭发射“韩国探路者月球轨道器”(KPLO),第二阶段的“落”是在2030年前利用独立研发的运载火箭发射月球着陆器。
巴西在2016年11月宣布,将于2020年12月向月球轨道发射纳卫星,该项目名为“探寻生命”(Garatea-L),任务目标是搜集有关月球表面的基本数据,并进行有关微生物、分子和细胞等科学实验。
在完成月球环绕、月面着陆/巡视和月背软着陆等探测任务之后,中国将在2020年前实施嫦娥工程“绕、落、回”第三阶段的月球采样返回任务。

SLIM月球着陆器
4 结束语
总之,开展月球探测可为探索和开发人类在地球以远的生存和驻留技术提供绝佳机会,实现月球科学价值研究与潜在资源勘探,演示验证载人深空探索技术;在月球建立研究站和试验基地,又可为探索火星和其他星球提供经验和技术。
