基于多级体素的支柱及支持装置点云自动提取方法
2019-02-18程智博
程智博
(中国铁道科学研究院集团有限公司 电子计算技术研究所,北京 100081)
接触网的支柱及支持装置担负着支撑接触网和保证接触线正常供电的重要任务,由于其露天架设且存在复杂的力学关系,容易受到自身使用寿命和环境因素的影响,导致故障率一直较高,严重影响高速铁路的运营安全[1],需进行高效、准确、实时地监控和检测。传统的人工检测和接触式自动检测效率较低,干扰正常行车秩序,无法适应铁路的快速发展。非接触式自动检测能够减少检测设备、降低投资成本,但目前非接触式自动检测较多集中在基于图像的受电弓、绝缘子、鸟巢及接触网几何参数[2]等的检测。
三维激光扫描技术作为近年来快速发展的一项技术,可以快速获取高精度的数据信息,在城市、交通、电力、水利等领域得到广泛应用,其获取的三维点云数据包含地表及其上方各种目标的方位及形态信息,但含有无关数据,需在进一步的数据处理过程中得到有效的点云信息。近年来学者们研究了铁路场景中三维点云的识别和提取,文献[3—5]利用车载激光扫描点云识别轨道中心线,得到较高的精度;文献[6]基于区域生长方法提取铁路电力线;此外,点云识别在道岔[7]、隧道[8]、罐车容积[9]等检测方面也得到应用。
本文在分析支柱及支持装置的空间和几何特征的基础上,为实现更高精度的目标地物提取,提出一种适用于支柱及支持装置的区域生长方法,该方法能够根据多级体素自动选取种子,利用支柱及支持装置的形态特征与地面点和接触网分开,从而加快搜索目标速度,提高提取精度,有效实现了支柱及支持装置点云的自动提取。
1 点云自动提取方法
为了提高三维激光点云数据中支柱及支持装置的提取精度,首先对点云数据进行剔除异常点、插补数据及去除噪声等预处理,确定提取目标地物即支柱及支持装置的空间范围,同时利用八叉树方法构建多级体素;其次利用支柱及支持装置的空间几何特征,快速生成种子体素;然后基于区域生长方法,制定生长规则,分割出支柱及支持装置点云,直至所有种子体素均搜索结束,每个种子体素对应的生长区域都包含着候选的单个支柱及支持装置点云数据;最后结合多级体素,利用目标地物的局部几何参数特征不断细化提取结果,再次剔除掉非目标地物点云,提高单个支柱及支持装置的提取准确度与精度。
支柱及支持装置点云自动提取方法的流程如图1所示。
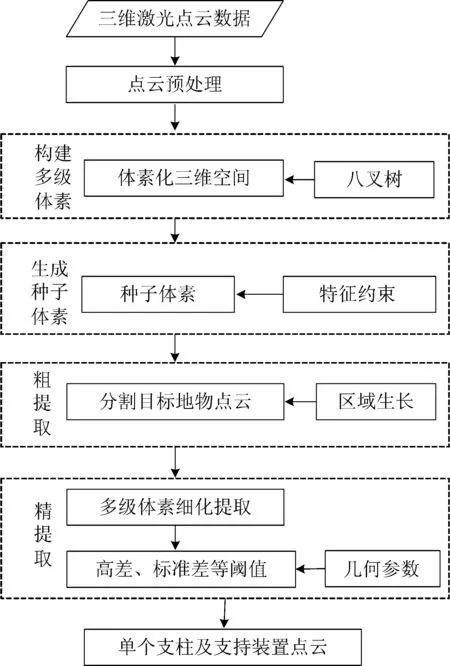
图1 支柱及支持装置点云自动提取流程
1.1 构建多级体素
由于点云数据数量较大且分布散乱,逐点计算效率低且难以判断单个点属于哪一类地物,因此需要将点云按照一定的结构进行组织,根据相应结构进行计算和判断。点云常用的组织结构有不规则三角网、网格结构等,但这些结构均适用于小范围数据,对数量极大的数据表现能力极度下降。体素是三维空间中具有特定的长、宽、高的立方体,是最小的特征提取和识别单元。众多研究表明,体素在组织点云数据时具有较好的效果[10-11]。将点云空间划分为有序的体素网格,这个过程称为体素化,该过程使得杂乱无章的点云规则化,将整体点云数据划分到体素中,利用体素内点集的属性或特征作为体素的属性或特征,达到快速提取目标地物的目的。
当提取场景具有复杂性且目标地物具有多样性时,单一级别的体素无法准确反映目标地物的局部几何特征;边长较大的体素有利于较粗或较大目标地物的特征识别,加快提取效率,但不利于其细部特征的识别[12];边长较小的体素能够反映细部特征,有利于优化目标地物提取精度,但大大降低较粗或较大目标地物的识别和提取效率。
因此,基于八叉树划分的原理构建多级体素,将点云划分到相应级别的体素中,同时构建八叉树空间索引,保留点云间的空间关系,进一步提高搜索效率。八叉树构建多级体素[13]如图2所示。

图2 八叉树构建多级体素示意图
在利用八叉树构建多级体素的过程中,将点云P(P={P1,P2,…,Pn})所占的空间以递归的方法不断细化为8个子区域,直至区域边长与设定体素边长相等为止。为了提高处理效率,同时避免某些点数过于稀少的无意义区域,该过程只对有效区域进行操作。有效区域Flag(Flag=1)的判定规则为
(1)
式中:Gnum为区域内点云数目。

(2)

根据试验,使用3级体素提取支柱及支持装置点云,能够减少区域生长的工作量、提高生长速度,也能够有效地保证提取精度,即利用第1级体素进行区域生长算法对支柱及支持装置粗提取,再利用第2和第3级体素进行进一步的精提取。
1.2 生成种子体素
为了生成种子体素,需要分析支柱及支持装置的空间及几何特征。支柱及支持装置高于周围地物(铁轨、路基等),且沿铁路线路以不同的间隔线性分布,单个地物具有分布的连续性,可将其分成2个部分:一是直立的杆状支柱;二是由水平方向和倾斜方向的杆状物体组成的支持装置。如图3所示。
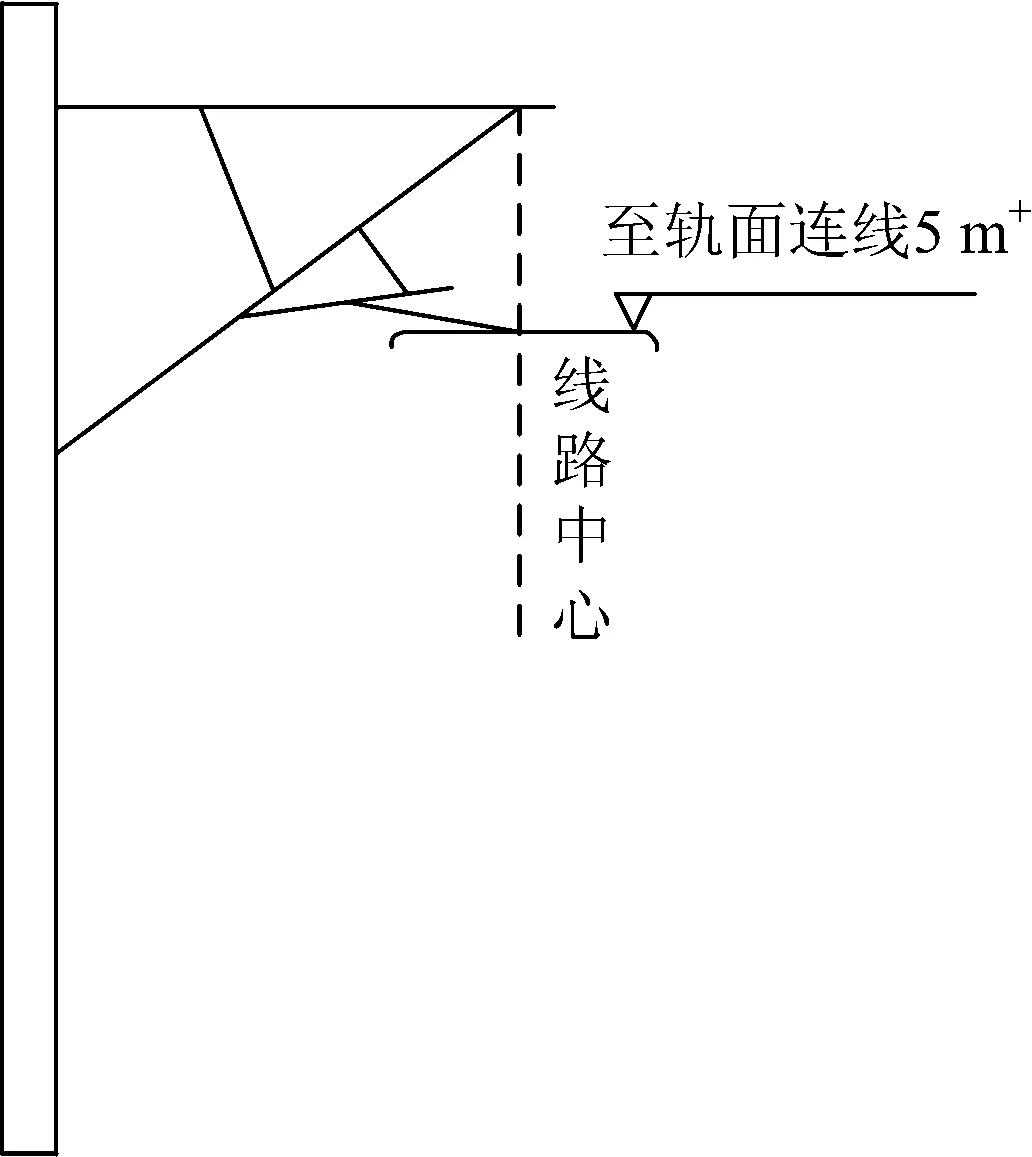
图3 支柱及支持装置示意图
通过分析发现,属于同一杆状地物上的扫描点在空间上相邻且具有相同或相近的法向量,而颜色差异、反射强度等特征差异较小,因此选用法向量作为选取区域生长种子体素的显著特征。
法向量的计算方法众多,但基于局部平面拟合算法[14]的计算结果在质量和速度上较好,通过点云中每一个点的领域点近似在某个局部平面中,并将该平面的法向量作为该点的法向量。
支柱是垂直于地面的物体,沿垂直方向进行延伸,其底部与地面相连,上部与支持装置相连,而支持装置又与接触导线和承力索相连。因此,先找到位于支柱上的种子体素,再由种子体素分别向上和向下生长,向上生长时区分接触导线和承力索,向下生长时区分地面,则可获取支柱和支持装置。对于支柱可以概括为以下3个特征:①支柱垂直于地面,即位于支柱的体素法向量平行于地面;②支柱具有垂向延伸性,且高度一般大于5 m;③支柱邻域地物具有唯一性,即在一定领域范围内有且只有1个支持装置与其相邻。
利用支柱的3个特征对某一体素Voxel-q(xq,yq,zq)进行判断,若其符合以下3个条件,则认为该体素是位于支柱上的种子体素,具体判断步骤如下。

步骤3:判断与体素Voxel-q垂直方向相邻的5个体素是否为空体素,即满足Voxel-q(xq,yq,zq+i)≠∅,i∈{1,2,3,4},满足则转入步骤4,否则舍弃。
步骤4:判断体素Voxel-q的在垂直方向即z方向上的值zq是否为与其所有连通体素中的最小值,且该体素在所有连通体素中点云数量最多,即在满足zq→min的前提下,选取Gnum(Voxel-q)→max的体素,则将该体素进行标记,并存入备选种子体素的容器中。
步骤5:循环判断下1个体素,直到所有体素判断完毕。
步骤4中的连通体素是指与当前体素相邻的有效体素,包括点、线、面3种连通情况,如图4所示。
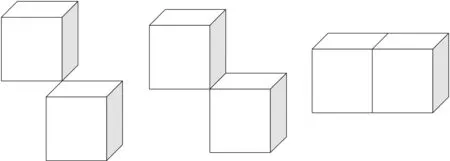
图4 连通体素示意图
1.3 支柱及支持装置粗提取
目前点云提取单个杆状地物的算法大致分为3类:一是基于聚类特征的方法,该方法直接对散乱的点进行分割和目标提取,不需要查找点或区域,但计算量较大,容易导致目标提取错误;二是基于模型拟合的方法,该方法不受异常数据的干扰,但在复杂的场景下或对几何关系复杂的地物进行提取较为困难;三是基于区域增长的方法,该方法提取地物的精度较高,但容易产生混合体素,且提取地物的精度取决于种子的选取以及规则的制定。支柱及支撑装置为杆状地物,利用区域生长方法的向上、向下生长算法能够较好提取该目标地物,因此选取该方法作为提取基础算法。
对生成的种子体素进行区域生长,向上生长主要为了区分与支持装置相连的接触导线和承力索的点云,其中接触导线和承力索几乎平行于地面,利用该部分点云数据高程变化较小的特征作为生长规则;向下生长主要是为了区分与支柱相连的地面点云,杆状地物支柱是沿垂直方向进行延伸且在水平面变化不大,同时地面相对较为平坦,垂直方向的数值变化也相对较小,利用这些特征制定生长规则。生长步骤具体如下。

其中,第l级体素的超高阈值hl为
(3)
式中:m和n为参数。
其中,第l级体素的标准差阈值σl为
(4)
式中:β为参数。
步骤4:循环上述步骤,直到所有种子体素遍历完毕。
1.4 支柱及支持装置精提取
为了避免单一级别的体素生长导致的支柱及支持装置无法精确提取,采用多级别体素细化支柱及支持装置点云,同时加快提取速度,其示意图如图5所示。

图5 多级体素精提取示意图
支柱及支持装置精提取具体步骤如下。
以上步骤中,步骤1和步骤2组成了向上生长规则,步骤3和步骤4组成了向下生长规则。
2 试验及分析
为了验证本文提出方法的有效性和适用性,采用2016年9月在郑州铁路局某车站试验区段采集的点云数据进行试验。该区段铁路线长约300 m,地面有一定的起伏,试验数据共有1 241 654个点,数据覆盖范围约为300 mm×20 m,点云数据最大高程为17.6 m,最小高程为0.26 m。点云数据中包含多种铁路基础设施,主要有4条铁轨、轨道板、复杂交错的接触网、12个接触网支柱等。点云数据如图6所示。

图6 试验区域点云数据
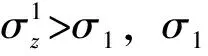
利用本文方法对该试验区段内的支柱及支持装置自动提取,提取结果及序号如图7所示。
由图7可以看出:采用本文方法共提取出12个支柱及支持装置,与试验区域实际情况相符,表明该自动提取方法较好,没有掺杂地面或接触导线等地物点云,12个支柱及支持装置全部完整、正确地提取出来。计算结果表明,单个支柱及支持装置点云数目自动提取的完整度和正确率分别为94.08%和94.48%。
为了比较自动和手工提取单个目标地物的精度,采用平均绝对误差(Mean Absolute Error, MAE)和平均绝对百分比误差(Mean Absolute Percentage Error, MAPE)进行衡量。自动和手工提取单个目标地物完整度、正确率、高度和宽度的MAE和MAPE对比结果如图8所示。
计算结果表明,采用本文方法自动提取的单个目标地物点云完整度和正确率的MAPE分别为3.43%和2.49%,高度和宽度的MAPE仅为0.709%和0.67%,MAPE越低说明提取精度越高、算法效果越好。因此,可以反映出本文提取的支柱和支持装置点云精度较高,且各部分提取都较为完整和准确。
由图9可以看出:从单级体素、2级体素到3级体素,完整度、高度及宽度3项的MAPE均呈下降趋势,说明3级体素的提取精度最高;从单级体素到2级体素,单个目标地物的高度和完整度的精度提升较小,而宽度的精度提升幅度较大;从2级体素到3级体素,完整度、高度及宽度3者的提取精度均明显提高,说明采用3级体素提取效果最优。
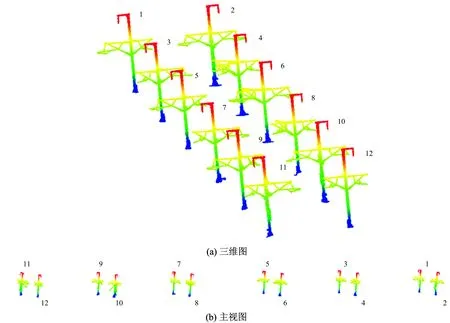
图7 提取结果
图8 单个目标地物的相关精度

图9 不同级别体素提取精度对比
进一步对提取出的单个支柱及支持装置进行分析,其自动提取的点云与手动提取的点云吻合度较高,各形态参数偏差也较小。以序号为3号和7号支柱及支持装置为例,采用本文方法能够将地面、接触导线、回流线、承力索等非目标地物全部剔除,且目标地物没有被错误剔除,比较精确地提取出了目标地物的完整点云,尤其是7号支柱具有3套支持装置,其点云也能够完整、无误地被提取,具体如图10所示。

图10 3号及7号目标地物提取结果
但是本文方法仍然存在一些问题,主要集中于支柱及支持装置的补偿装置提取,利用体素内点云的高差和标准差的生长规则只能对补偿装置进行粗提取,不能精确提取,且包括一些误提取,如补偿绳提取时。然而,对地面及接触线等能够较好地区分并删除,表明整体支柱及支持装置提取的参数仍然较为正确,并不影响后续的数据获取或检测等应用分析。复杂情况下目标地物的提取结果如图11所示。
3 结 语
以三维激光扫描测量系统采集的点云数据为研究对象,根据接触网支柱及支持装置的空间和几何特征,提出基于多级体素的点云自动提取方法,利用目标地物的几何特性自动选取种子体素,通过制定生长规则实现粗提取,并采用一种渐进式的提取策略,提高目标地物的提取精度和生长速度,给出该方法具体实现过程;最后,选取某一实验段进行方法验证。通过对目标地物提取结果的完整度、正确率及精度方面进行分析,表明本文方法可实现目标地物的完整和精确提取,同时,单级体素和2级体素的对比结果也充分验证了多级体素提取的效果最优。下一步将继续研究对铁路各类基础设施的点云提取,包括铁轨、道床等。

图11 复杂情况目标地物提取结果