通用无人机仿整机自动测试系统设计与实现
2019-02-16王怡苹文天柱
王怡苹,文天柱,刘 勇
(海军航空大学,山东烟台264001)
随着航空技术、电子技术、计算机技术、网络技术等高新技术的迅猛发展,无人机技术也不断进步,其性能越来越好,实现的功能日益丰富。
无人机具有不惧伤亡,隐蔽性好,生命力强,滞空时间长等特点[1],不仅能在战场上与有人战斗机并肩作战,而且能在某些情况下替代有人机,遂行作战任务,毋庸置疑,在未来相当长的一段时间内,无人机将逐渐成为夺取制空权的主力军[2-4]。
与此同时,无人机系统各机载设备的安全性、可靠性日益引起人们的关注[5-7],如何高效而精确地检测、模拟无人机各种机载设备产生的信号,已越来越重要且急迫。
无人机是一个复杂的系统,除了机载计算机,还配备多种航电设备,如各类舵机、发动机以及各种传感器,要完成对无人机系统准确且可靠的测试,就要对整个无人机设备产生的模拟输入信号、模拟输出信号、数字I/O信号、大气信号及各类通信信号进行全面的模拟与测试[8]。
1 设计思想
目前,无人机的测试方法主要有无人机整机测试和分机测试2种。整机测试可完成一个完整无人机的测试,测试过程中可对各机载设备间的信号与信息交互实现检测。但其局限性在于,所需的测试场所空间要大,且对于无人机的可测试性设计要求较高。分机测试是每次只能对某一无人机机载设备的功能和性能进行检测。其局限性在于,该机载设备与机载计算机间的时序要求、反应时间等性能不能进行精确的检测,且被测机载设备与其他机载设备间的信号交联也无法完成。
机载计算机作为飞行控制系统的核心,对整个无人机系统起着至关重要的影响。本文提出一种将机载计算机作为自动测试系统组成部分的无人机仿整机测试系统的设计方法。机载计算机既作为被测对象,又是测试系统的组成部分。测试时,通过机载计算机控制其他机载设备工作,充分发挥机载计算机本身与其他机载设备的数据交联功能,实时采集、判断各机载设备的输出信号,复现无人机整机实装的BIT自检和正常工作过程。
测试过程中,若无人机的某个机载设备未接入测试系统中,则由测试系统中的测试资源模拟该机载设备的功能与输出信号,完成其与机载计算机的信号交联和通信,保证无人机的BIT 自检和正常工作过程的执行成功,完整检测被测无人机机载设备的性能与功能。即无人机自动测试系统既可完成无人机的测试,也可模拟多型无人机机载设备的功能[9-12]。
2 测试系统的构成
通用无人机仿整机自动测试系统,由测控计算机、测试资源集、阵列接口、机型测试适配器、测试电缆和无人机组件集组成。其中,测控计算机内置管理程序、测试程序、测试资源驱动程序和数据管理模块。管理程序是面向用户的顶层设计;测试程序根据具体型号的无人机测试需求完成;测试资源驱动程序是测试资源集的控制代码;数据管理模块负责实现测试结果的显示、保存与打印功能。
2.1 系统硬件组成
测试系统的硬件组成如图1所示。测控计算机是整个自动测试系统的控制与信息采集中心,可实现测试资源的控制、测试结果的显示、测试过程中与操作人员的交互等功能[13-15]。

图1 测试系统硬件组成Fig.1 Hardware structure of test system
测试资源集包括直流电源、函数发生器、数字示波器、数字多用表、微波信号源、串口通信模块、DA模块、大气参数测试仪、程控电阻模块和开关模块。阵列接口是测试资源的输入/输出信号的汇总端[16-17];机型测试适配器包括多型无人机的机型测试适配器,每个机型测试适配器面向某一型号的无人机,它是测试资源集输入/输出信号与测试电缆的转接装置,可完成测试系统与被测无人机机载设备间信号的转接;测试电缆包括多型无人机测试电缆,测试电缆用于无人机机载设备与机型测试适配器、被测无人机机载设备之间的连接;无人机组件集包括多型被测试无人机的机载计算机,机载计算机可完成与测试系统、被测机载设备的控制与数据交联。
各测试资源的功能分别为:
1)直流电源提供无人机机上电源所需的输入电压;
2)函数发生器输出一个正弦信号,通过变换该信号的频率,模拟发动机的不同转速信号;
3)数字示波器测量机载计算机和被测机载设备指定针脚的输出信号属性;
4)数字多用表完成各路电压的测试;
5)微波信号源模拟外部干扰信号,完成无人机的导引头测试;
6)串口通信模块模拟气压高度/空速传感器、任务设备、GPS、导引头、三轴磁力计与机载计算机机间的串口通信信号,实现测控计算机与机载计算机的通信;
7)DA 模块输出多路不同的电压,模拟发动机的温度和各路舵机信号(垂直陀螺、左右升降舵、前轮、左右方向舵、风门等);
8)大气参数测试仪模拟气压高度/空速传感器输出到机载计算机的信号;
9)程控电阻输出不同的电阻值,模拟发动机的缸温;
10)开关模块用于完成测试过程中的信号转接,并模拟机载计算机输出的对外部分机及部件的控制信号,如停车控制、开伞等。
2.2 系统软件设计
以LabWindows/CVI作为测试开发环境,LabWindows/CVI 是NI公司开发的基于C 语言的测试开发环境。其交互式编程方法和丰富的函数面板,使用测试开发人员能高效地编写测试程序[18]。使用LabWindows/CVI SQL ToolKit作为数据库开发工具。NI公司提供的SQL ToolKit 包含了一套简单易用的函数工具,使用户能快速连接本地或远程数据库,并且无需进行结构化查询语言(SQL)编程就可以执行诸多常用的数据库操作。可以方便地连接各种常用数据库。系统软件结构如图2所示。

图2 系统软件结构图Fig.2 Structure of system software
管理程序可完成以下功能:①实现对测试程序的管理,保证在同一时刻只有一个测试程序运行;②通过对机型测试适配器中识别电阻的测量,自动调用对应的无人机测试程序;③调用数据管理模块,实现测试结果数据文件的显示和打印等功能。
无人机测试程序可完成以下功能:①实现对测试资源的调用;②根据测试流程,完成各个测试项目;③对测试结果的正确与否进行判断,并完成测试结果的记录和保存。
在自动测试系统设计中,采用了仪器可互换技术,避免当一台/块测试资源发生故障时,由于没有同型号的测试资源代替,而导致整个测试系统无法工作或需修改测试程序才可以工作的情况。即测试程序调用仪器类驱动程序,由仪器可互换内核根据系统配置文件内容,调用具体型号的物理仪器驱动程序。以示波器为例,若测试系统中的示波器型号更换后,只需编写新型号的示波器物理仪器驱动程序,更新到系统软件中,并将配置文件中示波器的型号及驱动指向更新后型号和软件,无需更改测试程序,即可完成无人机的测试。
通用无人机仿整机自动测试系统的测试步骤如图3所示。

图3 无人机自动测试流程Fig.3 Test flow chart of UAV
步骤1:启动管理程序;
步骤2:通过对当前接入测试系统的机型测试适配器指定针脚连接的识别电阻进行测量,判断当前连接到测试系统的无人机的型号,并调用相应的测试程序;
步骤3:根据检测电缆内部的识别电阻,测试系统判断当前连接到系统的无人机机载设备的数量与类型;
步骤4:测试程序发送指令,机载计算机启动整机工作状态下的BIT 自检或某机载设备的功能检测,实现对所有实物状态和仿真状态机载设备的通信控制、信号交联和数据实时采集,对于未接入测试系统的无人机机载设备,由测试系统中的测试资源集模拟其功能;
步骤5:对测试结果进行处理、显示和保存。
3 测试示例
以垂直陀螺为例,无人机仿整机测试中有关垂直陀螺的测试内容如表1所示。
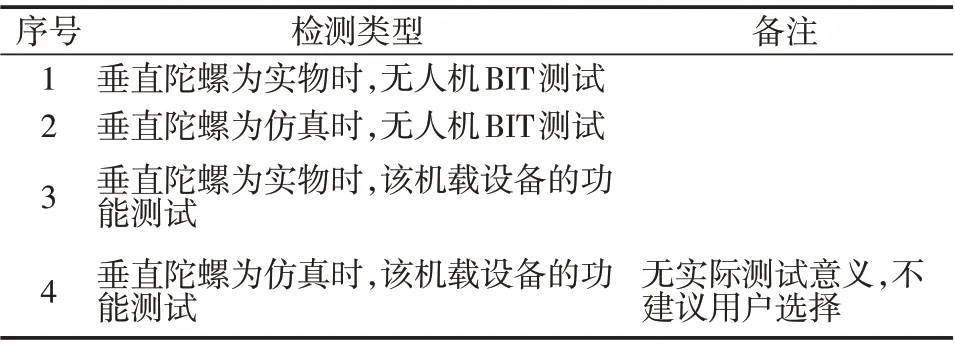
表1 与垂直陀螺相关的测试内容Tab.1 Test about vertical gyro
以表1中检测类型1和检测类型2为例,其测试流程分别如图4的左半部分、右半部分所示。
垂直陀螺为实物状态时,无人机BIT 测试过程中垂直陀螺被测步骤为:
1)垂直陀螺置于俯仰角0°,倾斜角0°的测试夹具上测试;
2)垂直陀螺置于俯仰角30°(抬头为正),倾斜角0°的测试夹具上测试;
3)垂直陀螺置于俯仰角0°,倾斜角30°(右倾为正)的测试夹具上测试;
4)垂直陀螺置于俯仰角15°(抬头为正),倾斜角-30°(右倾为正)的测试夹具上测试。
垂直陀螺为仿真状态时,无人机BIT测试过程中,分别由2 路DA 模拟通道输出不同的电压值,模拟垂直陀螺被测角度对应的输出电压值,各步骤对应的电压值分别为:①俯仰角0 V、倾斜角0 V;②俯仰角6.0 V、倾斜角0 V;③俯仰角0 V、倾斜角输出电压-6.0 V;④俯仰角3.0 V、倾斜角6.0 V。
在测试过程中,机载计算机不考虑当前接入测试系统的垂直陀螺是实物状态,还是仿真状态,只需测量垂直陀螺与其连接的针脚间的电压值,从而完成相应角度值的换算,由串口总线上报给测控计算机,进行测试结果的判断。即无论垂直陀螺的状态如何,在仿整机的通用无人机自动测试系统中,机载计算机都能完整执行其BIT或正常工作流程。
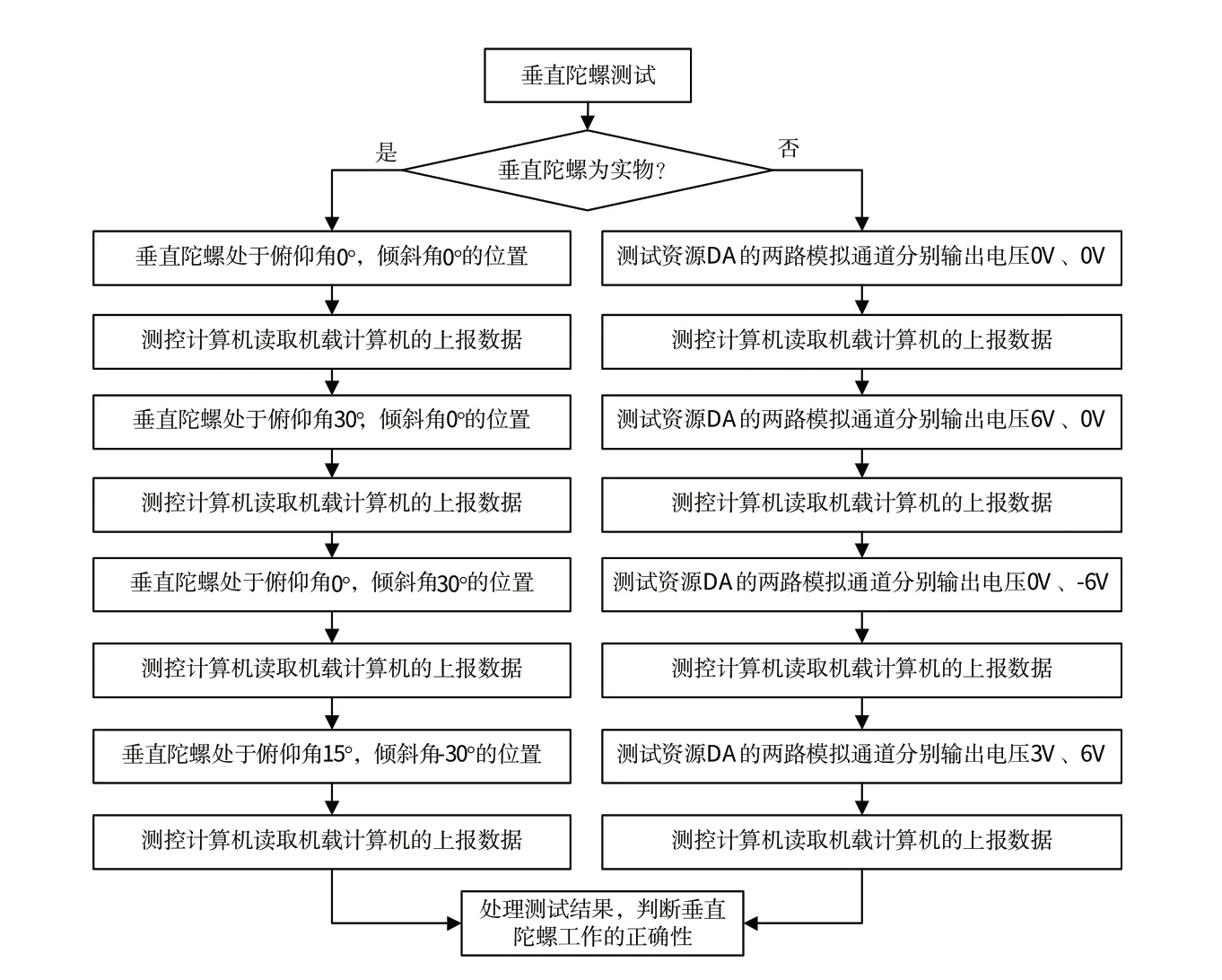
图4 垂直陀螺BIT测试流程Fig.4 BIT test flow of vertical gyro
4 结论
本文提出的通用无人机仿整机自动测试系统与其他无人机自动测试相比,具有以下3个显著优点:
1)无人机仿整机自动测试系统,对接入测试系统中被测无人机机载设备的数量要求更灵活。将无人机的机载计算机集成到检测系统中,并利用系统中的测试资源模拟未接入的无人机机载设备的功能,以保持检测设备与实际装备信号环境一致。
2)通用无人机仿整机自动测试系统充分发挥机载计算机本身与无人机其他机载设备的数据交联功能,复现无人机整机实装的BIT 自检和正常工作过程。使经过维修检测后的无人机机载设备,重新安装到无人机实装中“即插即用”,保证无人机的正常工作,有效提高了维修可靠性,提升了无人机的战斗力。
3)配备不同型号无人机的机型测试适配器、测试电缆、机载计算机,并编写相应的测试程序,可完成不同型号的无人机仿整机测试,测试系统具有较强的可扩展性。
基于本文设计思想研发的通用无人机仿整机自动测试系统已交付使用,在内场维修环境中完成三型无人机的整机和机载设备联调检测,有效提高了检测设备的通用性和利用率,提升了无人机维修可靠性。
