假数据注入攻击下信息物理融合系统的稳定性研究
2019-02-15彭大天董建敏蔡忠闽张长青彭勤科
彭大天 董建敏 蔡忠闽 张长青 彭勤科
信息物理融合系统(Cyber-physical systems,CPS)是物理动态过程(Physical dynamics)在网络空间(Cyber)中高度集成的新型化网络控制系统[1],利用计算、通信和控制等先进技术分析信息,并通过反馈机制实现对物理过程的实时控制,是实现工业4.0和中国制造2025的最关键技术[2].典型的CPS有智能能源系统[3]、智联网[4]、无人系统[5]、智能核电工业系统[6]等.CPS基本架构由物理层(传感器、执行器和物理对象),有线和无线通信传输设备组成的网络层和监控层(控制器、估计器和检测器)组成.信息传输网络是CPS最基本的网络单元,实现信息互联互通.然而在CPS安全领域,信息传输网络的引入可能增加了物理层动态过程的安全风险[7],充斥于网络空间的各类网络攻击易引发控制性能的下降,进而可能造成巨大经济损失,甚至危及人员生命安全.
2015年IEEE专题[8]研究表明Cyber networks和Physical dynamics高度融合是CPS智能化关键之所在,同时强调人因(运营人员或攻击者)决策是CPS安全风险主要问题源之一.例如,常见的分布式拒绝服务(Distributed denial of service,DDoS)攻击[9]大致分为两个阶段:1)在不同时刻和网络拓扑节点上试图控制多个终端机;2)协同地发送大量数据包形成洪流至多个目标IP服务器,使其频繁响应该访问请求,用以过度消耗大量的带宽,路由及计算资源甚至造成超负荷瘫痪,从而使合法用户无法请求访问,影响正常的网络服务.为了检测和防御这类攻击[10],综合性策略应该从以下几个方面考虑:1)更新增强型防火墙、安全补丁和反病毒软件;2)提升身份验证密码保护机制和入侵检测系统的性能;3)开发有效的系统访问请求响应(DNS)协议用以识别恶意非法用户;4)提出新型的路由资源调度,将访问请求分流管理,降低恶意攻击的风险;5)构建安全可靠的网络架构用以故障恢复和数据备份.在工业网络攻击中存在一类数据完整性攻击:重放攻击(Replay attacks),攻击者通过网络非法接入,侦听到系统处于稳定运行阶段的传感测量数据,然后重复发送该数据包形成虚拟的测量输出至控制中心,致使检测系统误认为该测量输出是合理满意的,同时攻击者可以任意注入恶意控制命令去影响受控对象的控制性能.为了检测该类攻击,利用Neyman Pearson检测器和半正定规划设计了一种物理水印检测数据的完整性[11].从攻防博弈的角度,试图找到控制性能和检测能力的纳什平衡,在可接受的控制性能前提下,尽可能缓解重放攻击对系统的不利影响[12].2017年5月爆发了一种席卷全球的新型勒索病毒[13]:WannaCry,它利用针对Windows操作系统的网络层协议的漏洞或垃圾邮件、恶意广告链接等方式感染主机,并自动执行RSA-2048加密程序迅速锁定存储器上的文件系统,这类加密机制一般用户无法(暴力)破解,必须付费才能获取解密口令.随后Microsoft发布了Critical补丁用以修补易为该病毒所利用的漏洞.更新杀毒软件、备份数据、关闭闲置的网络端口和删除垃圾邮件等常用措施能有效预防此类病毒[14].
近年来,欺骗攻击由于隐蔽性和极具破坏性特点成为网络攻击研究中的热点.例如著名网络战标志性事件StuxNet[15],攻击者利用监督控制和数据采集系统(Supervisory control and data acquisition,SCADA)的网络漏洞注入蠕虫病毒,目的是感染核浓缩工作的离心机控制系统,使得监测结果显示离心机正常工作,而实际已严重失控.作为欺骗攻击的典型代表,假数据注入(False data injection,FDI)攻击利用信息传输网络漏洞,在传感器或执行器上注入攻击者精心设计的假数据,改变传感器测量值或控制器控制指令,确保绕过检测器的坏值检测同时影响物理动态过程的控制性能.因此,FDI攻击对CPS的安全威胁几乎难以避免[16-17].其最早由Liu等学者提出[18],在电力系统中通过篡改传感数据改变状态估计,同时能避免被基于最小二乘的坏值检测器发现,文献[18]给出FDI攻击的定义并阐述了隐蔽性和难以检测性等特点.然而该工作仅考虑了传感器端的测量数据篡改,并未考虑在执行器端注入控制假数据.本文给出的攻击模型同时考虑了执行器端和传感器端的假数据注入.
在此基础上,人们开始研究FDI攻击在网络控制系统的应用.Kwon等基于线性时不变(Linear time invariant,LTI)系统提出Deception attack model[19]并制定了三类混合攻击策略研究对系统状态估计值和测量残差的影响.Covert misappropriation attacks[20]主要构建基于反馈控制的Covert agent,与原系统控制器对抗,实现对控制系统影响并保持FDI攻击的隐蔽性.Stealthy integrity attacks[21]利用最大扰动状态可达集来衡量对控制系统的影响程度.基于输出跟踪网络控制系统,Pang等[22]提出了Two-channel FDI attacks影响系统输出跟踪误差.Coding scheme[23]用于检测FDI攻击,使用状态估计误差和残差两个指标来量化FDI攻击对系统性能的影响.这类研究给出了基于控制系统的FDI攻击研究框架,但是往往假设受控对象为不稳定系统(即系统矩阵至少存在一个不稳定特征值),攻击者利用执行器端注入的控制假数据抵消掉原系统控制器的稳定调节功能,相当于受控对象实际上没有收到任何有效的控制指令,致使系统失稳,同时在传感器端对测量值进行篡改达到攻击隐蔽性的目的.当受控对象为稳定系统时,这类攻击策略将失去效力.本文将主要针对稳定的受控对象设计FDI攻击协同策略.文献[22]尽管考虑了受控对象的稳定性,但研究的输出跟踪闭环控制不具有一般性.本文以最基本控制单元为研究对象,所提出的FDI攻击协同策略能够拓展到其他控制系统.
最优攻击策略也是许多学者专注研究的热点问题.例如Stealthy control signal attacks[24]提出了两目标优化模型:降低FDI攻击可检测性和增大控制代价.FDI攻击通过篡改电表数据,触发安全约束经济性调度子系统的负载再分布机制,从而引起发电功率再分配[25],使攻击者获取非法经济利益[26].在此基础上,我们已有的工作研究了FDI攻击能够操纵区域边际价格以帮助电力生产方利益联盟实现非法收入[27].这类研究往往利用FDI攻击协同性特点增大系统控制成本或获取经济利益,并未考虑FDI攻击协同策略如何影响系统的稳定性.本文将研究FDI攻击操纵系统稳定性的协同攻击条件.
FDI攻击的实现往往假设攻击者完全掌握控制系统模型参数、网络拓扑结构(及Jacobian矩阵)、最优控制器和检测器检测方法等信息.这类假设看似勉强,但是在网络攻击领域具有一定的合理性,因为攻击者可以利用网络漏洞侦听足够的系统运行数据,进行信息综合,从而获取与系统模型相关的先验知识.Liang等回顾了FDI攻击面向电力系统的研究现状[28],并以2015年乌克兰停电事件[29]为例揭示了FDI攻击假设条件的合理性和攻击协同性特点.
本文着眼于最基本控制单元并给出最具一般性的FDI攻击模型,直观地揭示FDI攻击如何影响系统内部状态和外部测量.提出的FDI攻击协同策略进一步拓展了已有工作的研究内容,适用于所有稳定和不稳定的受控对象,能够有效分析其对CPS稳定性影响.本文主要贡献包括:
1)从攻击者角度,构建FDI攻击效力模型来量化FDI攻击对CPS性能的影响程度,并提出一个攻击向量协同策略,理论上分析了控制假数据和测量假数据对系统状态估计误差偏差量和残差偏差量的影响.
2)基于给定的攻击向量协同策略,理论上分析控制假数据和测量假数据对系统测量输出和实际输出的影响,并给出操纵CPS稳定性的攻击条件.
3)通过对稳定和不稳定LTI系统的数值仿真,验证FDI攻击效力模型和协同策略的有效性.
本文组织架构如下:第1节介绍正常(无攻击)情况下,CPS控制系统的基本组成单元;第2节介绍FDI攻击效力模型;第3节提出FDI攻击协同策略并分析了对CPS稳定性的影响;第4节进行数值仿真及结果分析;第5节给出本文工作的结论.
1 CPS控制系统
CPS控制系统最基本的控制单元包括受控对象、状态估计器、坏值检测器和控制器.考虑受控对象为随机离散LTI系统,其动力学模型如下:
其中,xk∈Rn,uk∈Rp和yk∈Rq分别是系统状态变量、控制输入和测量输出;A,B和C是系统矩阵、输入矩阵和输出矩阵;ωk和ξk分别表示过程噪声和测量噪声.通常假设系统噪声是相互独立且均值为零的高斯白噪声,即ωk~N(0,Ω)和ξk~N(0,Ξ),Ω和Ξ分别是其协方差矩阵.(A,B)能控和(A,C)能观.假设系统初始状态x0=0.
卡尔曼滤波常用作CPS状态估计器和坏值检测器,其基本方程如下:

其中,第k时刻表示状态估计,Pk|k是估计误差协方差矩阵,Kk是卡尔曼增益矩阵,zk是测量残差.
当卡尔曼滤波达到稳态时,P=limk→∞Pk|k和K=limk→∞Kk.zk服从高斯分布,其均值为0,协方差矩阵V=CPCT+Ξ,即zk~N(0,V).
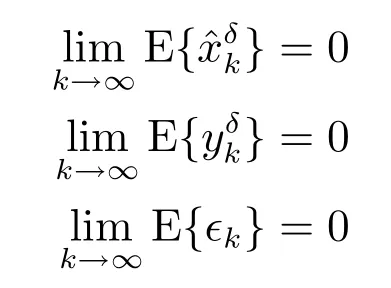
正常情况下(无恶意攻击),E{ωk}=0和E{ξk}=0,且卡尔曼滤波最优增益K保证矩阵(AKCA)是稳定矩阵.当系统处于稳态时,状态估计误差的期望值趋于0,即limk→∞E{ek}=0,同时,zk均能通过坏值检测器的检测.
基于卡尔曼滤波的最优状态估计,线性二次型调节器(Linear-quadratic regulator,LQR)常作为CPS的最优状态反馈控制器.在无限时域内最小化性能指标,其中Q和R是正定加权矩阵,最优控制序列如下:

其中,常数rc代表参考输入,L表示控制增益.L=(R+BTSB)-1BTSA,S是离散代数Riccati方程:S=ATSA-ATSB(R+BTSB)-1BTSA+Q的唯一正定解.
综上,在卡尔曼滤波和LQR共同作用下,无论CPS控制对象是否稳定(矩阵A的所有特征值都处于单位圆内,则认为控制对象稳定,否则,认为不稳定),其闭环控制系统总能达到稳定,即矩阵(AKCA)和(A-BL)都是稳定矩阵.
2 FDI攻击效力模型
假定CPS信息传输网络存在安全漏洞,允许攻击者侦听和篡改系统运行数据并掌握CPS的网络拓扑和模型参数.例如系统内部人员在闭环系统的前向和反馈通道恶意注入特定的假数据到执行器和传感器.基于模型(1),FDI攻击模型有如下形式:


为了有效量化FDI攻击对CPS影响,常用系统状态估计误差偏差量和残差偏差量来表示.因此,给定式(3)和式(7),得到如下动力学模型:
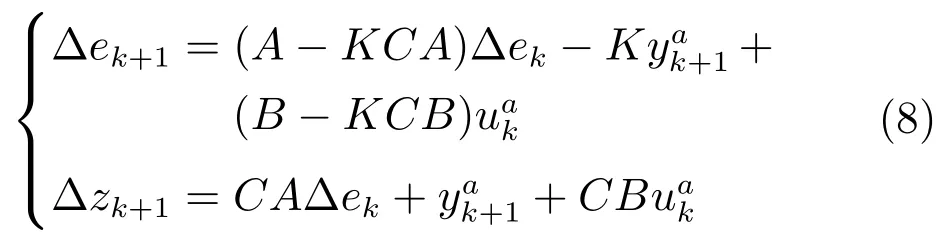
本文称该动力学模型为FDI攻击效力模型.显然,Δek和Δzk是关于攻击向量的函数,. 通过设计不同攻击向量,可以得到多种协同策略,对系统造成不同程度的破坏.
3 FDI攻击协同策略
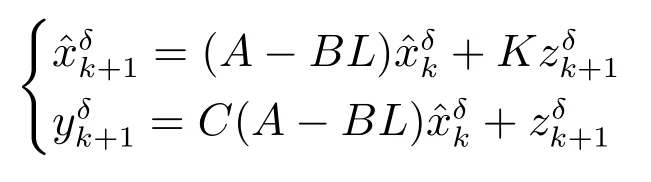
考虑CPS的执行器和传感器网络拓扑结构,攻击者能够协同设计控制假数据和测量假数据,注入到CPS引发系统内部状态偏离原工作点,甚至可能驱使稳定的闭环系统失稳,同时利用假数据的欺骗性和隐蔽性,避免触发坏值检测器报警.具体地,对于FDI攻击效力模型(8)来说,一旦FDI攻击协同策略成功实现,随着时间k递增,Δek将达到攻击者期望的任一工作点甚至无界而Δzk有界.前者考虑了FDI攻击对系统状态的稳定性影响,后者确保注入的假数据能够通过坏值检测器的检测.
引理1.给定FDI攻击模型(5),若攻击向量的协同策略满足
其中,ka表示处于上界或下界的时刻值,向量中任意元素都是正实数,矩阵H∈Rp×p是不稳定矩阵,即至少存在一个特征值处在单位圆之外.对于FDI攻击效力模型(8),可得
证明.将式(10)代入式(8)中的Δzk+1,可知Δzk+1=zk.已知zk~N(0,V),则

易知式(12)成立.
将式(10)代入式(8)中的Δek+1,可得

联立式(9),(13)和(14),写出如下增广系统:
由于矩阵H是不稳定的,则系统矩阵Λ至少存在一个特征值处在单位圆之外,该增广系统的内部状态和外部输出都会随时间k递增而发散,趋于不稳定状态;直到将收敛于其边界值.这时,随时间k递增,当原受控对象(1)的系统矩阵A是稳定矩阵时,将趋于稳定,分别收敛于是正实数);当A不稳定时,将继续发散,趋于无穷大.加之,(A,B)能控和(A,C)能观,易知式(11)成立.□
注1.上述引理,除得到式(11)和式(12)外,还可得到

注2.对于式(13),由于初始条件Δe0=0,可进一步得到的形式如下:

注3.对于增广系统(15),有如下讨论:
1)系统矩阵A直接反映了原受控对象(1)的稳定特性.当A不稳定时,随着时间k递增,只要有界,FDI攻击效力模型总能得到Δek无界且Δzk有界.攻击者利用原受控对象不稳定特性达到FDI攻击的目的,从一定程度上,此类攻击策略相对容易实现.许多工作[19,21-23]已涉及类似结论.本文给出的引理不仅归纳了已有工作的特定情形(即矩阵A不稳定),还主分析了矩阵A稳定的情形下,攻击者如何设计协同攻击策略以影响CPS的稳定性.
引理1给出的攻击向量协同策略实际上分析了FDI攻击对CPS内部状态和用于坏值检测的残差的影响.下面进一步分析由于FDI攻击引起的系统内部状态变量的变化对CPS稳定性的影响.
定理1.给定FDI攻击模型(5),若攻击向量的协同策略满足式(9)和式(10),则系统的测量输出和实际输出形式分别为
其中,M1表示正实数.
证明.根据式(6),可得
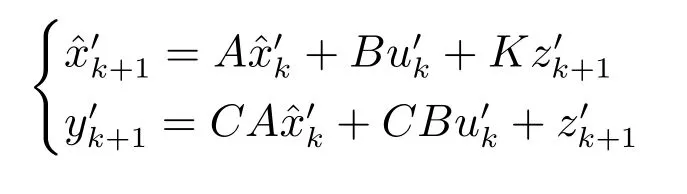
定义δ表示增量计算符号,如,.上式可写成
由于zk~N(0,V),且 limk→∞‖Δzk‖2=0,易知.对于上面的增量模型,相当于系统噪声.它的期望形式可写成


联立式(20)和式(21)得到一个新的增广系统.由于矩阵A-BL是稳定矩阵,该增广系统是稳定系统,随着时间递增,最终必然能达到新的平衡态.因此,可得
注4.FDI攻击的隐蔽性体现在:随着时间k递增,测量输出可达渐近稳定,以欺骗坏值检测器,而系统实际输出是否收敛依赖于原受控对象的系统矩阵A的稳定性.当A不稳定时,将无法收敛[22];当A稳定时,,k∈[0,ka]呈发散状态,直到收敛于攻击者期望的任一工作点.FDI攻击协同策略对CPS攻击效力的结果是影响系统实际输出的收敛性而不改变系统测量输出的稳定性.
注5.FDI攻击的协同性表现在:从执行器端注入的控制假数据用来扰动系统状态,进而影响受控对象实际输出的收敛性,而从传感器端注入的测量假数据用来消除系统状态改变所引发的不利影响,避免被坏值检测器发现.这大致分为三个步骤,如图1所示.
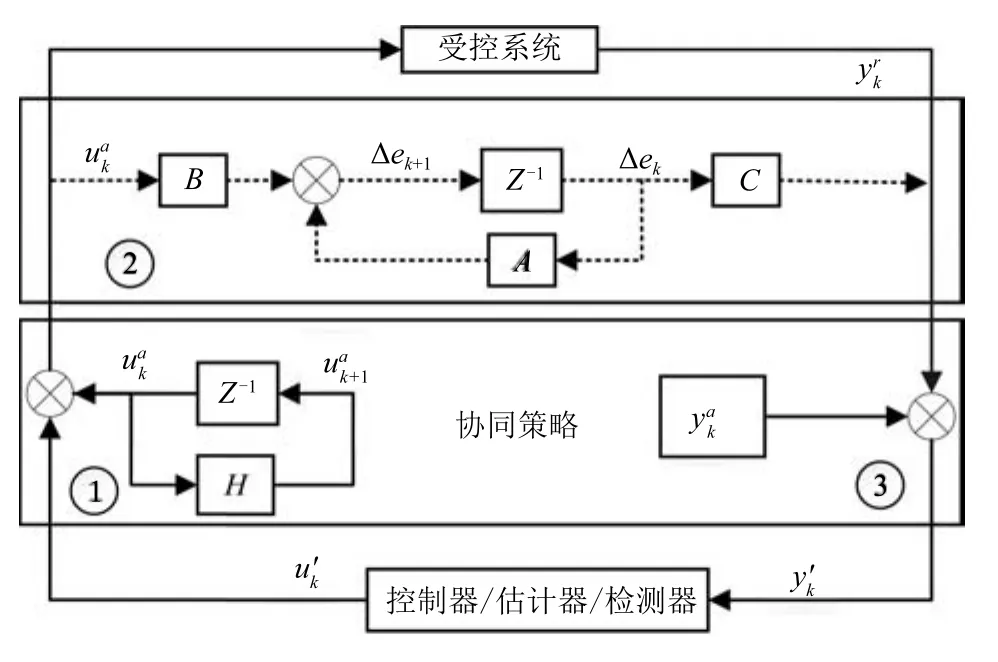
图1 FDI攻击协同策略架构Fig.1 Framework of coordination strategy under FDI attacks
步骤1.设计.根据式(9),攻击者主要设计攻击矩阵H和时间参数ka.其中,H的维度由执行器网络拓扑结构决定,H和ka的数值应依据攻击者的攻击意图而定.特别地,初始值.
步骤2.评估攻击效力.根据FDI攻击效力模型(8),量化系统状态估计误差偏差量和残差偏差量,使之满足式(11)和式(12).
步骤3.设计器网络拓扑结构决定,其数值满足式(17).这体现.根据式(10),其维度由传感了攻击者具有对防御者(坏值检测器)的欺骗能力和隐藏特性,是FDI攻击成功与否关键所在.
4 数值仿真及结果分析
本节通过数值仿真验证本文提出的FDI攻击协同策略的有效性.考虑两输入两输出的随机离散LTI系统作为CPS控制系统的受控对象.
4.1 稳定矩阵 A
给定稳定矩阵A1,参考输入和其他系统参数B,C,Ω,Ξ
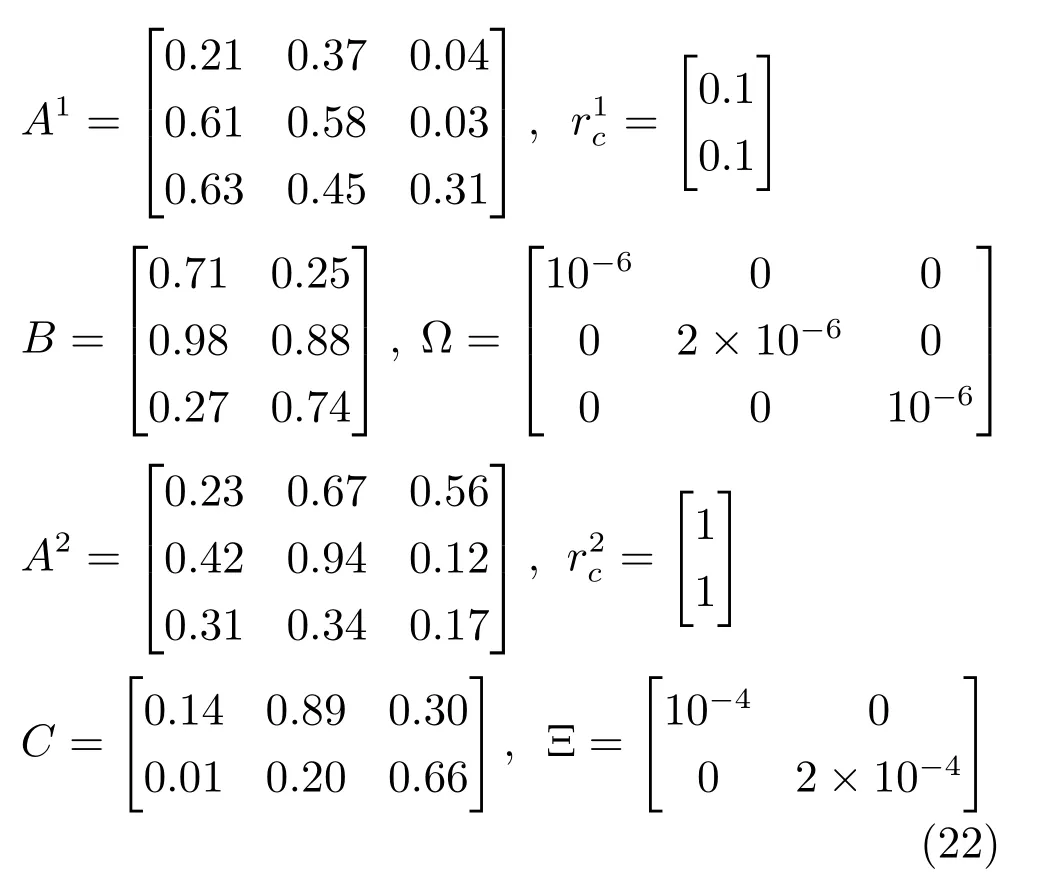
计算出系统信噪比约为[0.69,0.28]T,同时得到卡尔曼增益K和控制增益L

在k=0,1,···,19时,闭环LTI系统在卡尔曼滤波和LQR共同作用下处于稳定运行状态;在k=20时,攻击者开始发动FDI攻击.此时,根据协同攻击策略(9),设计控制假数据的初始值、攻击矩阵和时间参数如下:

图2是FDI攻击对稳定LTI系统的协同策略的控制假数据和测量假数据的变化情况.由于k=0,1,···,19时刻没有发动任何攻击,其值均为0.随着时间k≥20递增,不断增加直至ka=40时,可确定的上界,收敛于.同时,不断减小直至收敛于,结果符合式(16),其中下标1和下标2分别表示系统的两路输入或输出.从能量平衡角度,在执行器端注入的控制假数使系统能量增加,在传感器端注入的测量假数据抵消注入的能量,当收敛于收敛于,最终使系统总能量保持一定平衡,体现了FDI攻击的隐蔽性.

图2 FDI攻击对稳定LTI系统的协同策略Fig.2 Coordination strategy under FDI attacks against stable LTI system
图3是FDI攻击协同策略对稳定LTI系统的攻击效力评估结果.由于k=0,1,···,19时刻没有发动任何攻击,分别得到原闭环LTI系统的状态估计误差值的Euclid范数‖ek‖2和残差值的Euclid范数‖zk‖2.随着时间k≥20递增,不断增加,最终收敛于,同时,仍然保持原系统残差值的幅值波动水平,低于检测阈值0.08.可见,FDI攻击的真实意图体现在系统内部状态收敛性完全依赖于的收敛性,而FDI攻击隐蔽性体现在外部测量残差保持着与攻击前相同的收敛性,这与式(11)和式(12)的结论一致,验证了FDI攻击效力模型(8)的有效性.
图4是FDI攻击对稳定LTI系统测量输出和实际输出的影响.由于k=0,1,···,19时刻没有发动任何攻击,分别得到原闭环LTI系统输出yk,由于存在过程噪声和测量噪声,测量输出值存在一定波动.随着时间k≥20递增,FDI攻击真实意图体现在系统实际输出不断增加直至达到上界,收敛于,而FDI攻击隐蔽性体现在系统测量输出保持攻击前系统输出yk几乎相同波动水平,收敛于[0.24,0.17]T,这与命题的结果式(18)和式(19)一致.这也揭示了FDI攻击能够操纵系统实际输出的稳定性,而保持稳定的测量输出能欺骗CPS运营中心的坏值检测器.

图3 FDI攻击对稳定LTI系统的攻击效力Fig.3 FDI attack effectiveness on stable LTI system
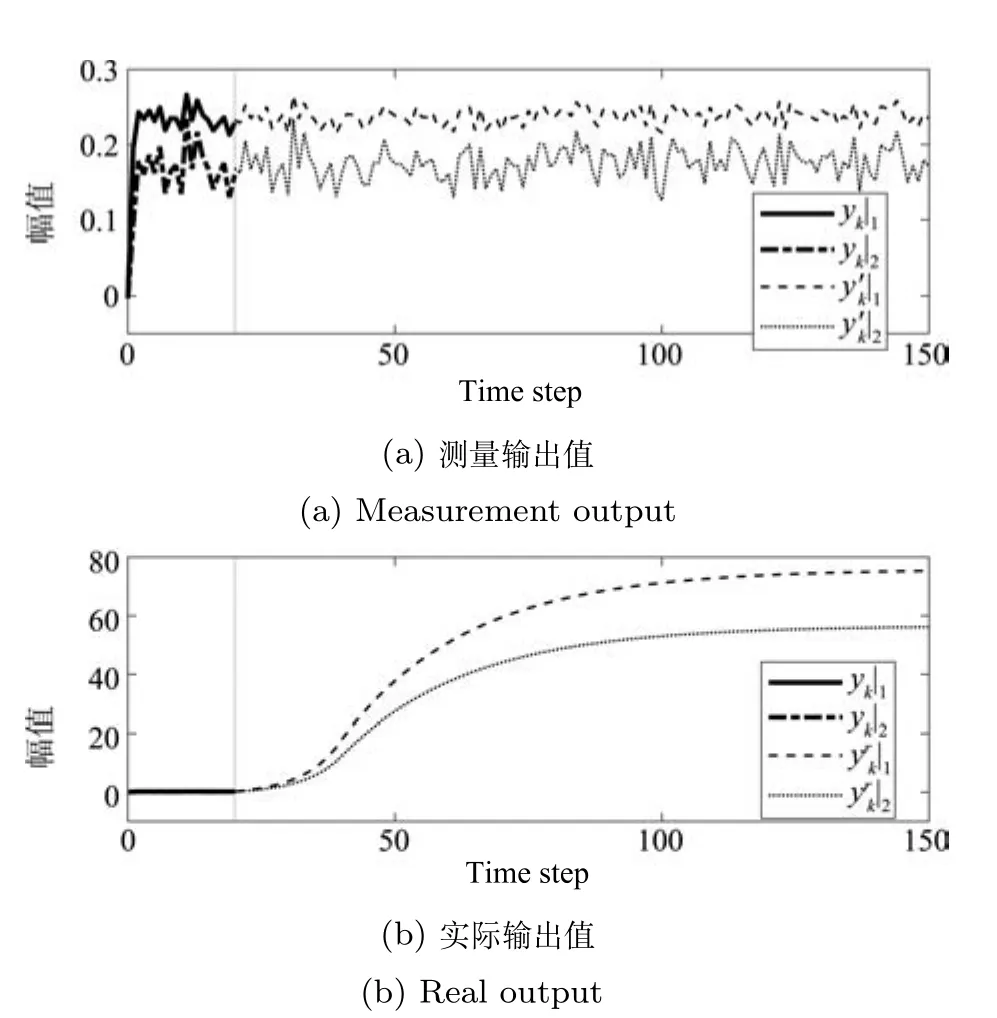
图4 FDI攻击下稳定LTI系统输出Fig.4 Outputs of stable LTI system under FDI attacks
4.2 不稳定矩阵 A
给定不稳定矩阵A2,参考输入和其他系统参数不变,如式(22)所示,计算出系统信噪比约为[6.92,2.75]T.针对不稳定的LTI系统在卡尔曼滤波和LQR共同作用下处于稳定运行状态,其卡尔曼增益K(同式(23)中K)和控制增益L为

该案例中,攻击者发动FDI攻击时间和协同策略与第4.1节的案例相同.图5是FDI攻击对不稳定LTI系统的协同策略控制假数据和测量假数据的变化情况.与图2比较,随着时间k≥20递增,即使控制假数据收敛于,测量假数据也无法收敛,这与注1和注2结论一致,原因在于不稳定矩阵A影响着式(17)的计算结果.这里取对数值表示趋于无穷的.

图5 FDI攻击对不稳定LTI系统的协同策略Fig.5 Coordination strategy under FDI attacks against unstable LTI system
图6是FDI攻击对不稳定LTI系统的攻击效力评估结果.与图3比较,随着时间k≥20递增,即使控制假数据收敛于,FDI攻击真实意图体现在状态估计误差偏差量的Euclid范数不断增加,也无法收敛,而FDI攻击的隐蔽性体现在残差偏差量的Euclid范数仍然保持攻击前残差值的幅值波动水平,低于检测阈值0.05.这与注3结论一致.这里取对数值表示趋于无穷的.
图7是FDI攻击对不稳定LTI系统测量输出和实际输出的影响.与图4比较,随着时间k≥20递增,即使控制假数据收敛于,FDI攻击真实意图体现在系统实际输出不断增加,也无法收敛,而FDI攻击隐藏性体现在系统测量输出保持攻击前系统输出yk几乎相同波动水平,收敛于[2.73,1.23]T,这符合式(18)和式(19)以及注4的结论.这里取对数值方便表示趋于无穷的.

图6 FDI攻击对不稳定LTI系统的攻击效力Fig.6 FDI attack effectiveness on unstable LTI system
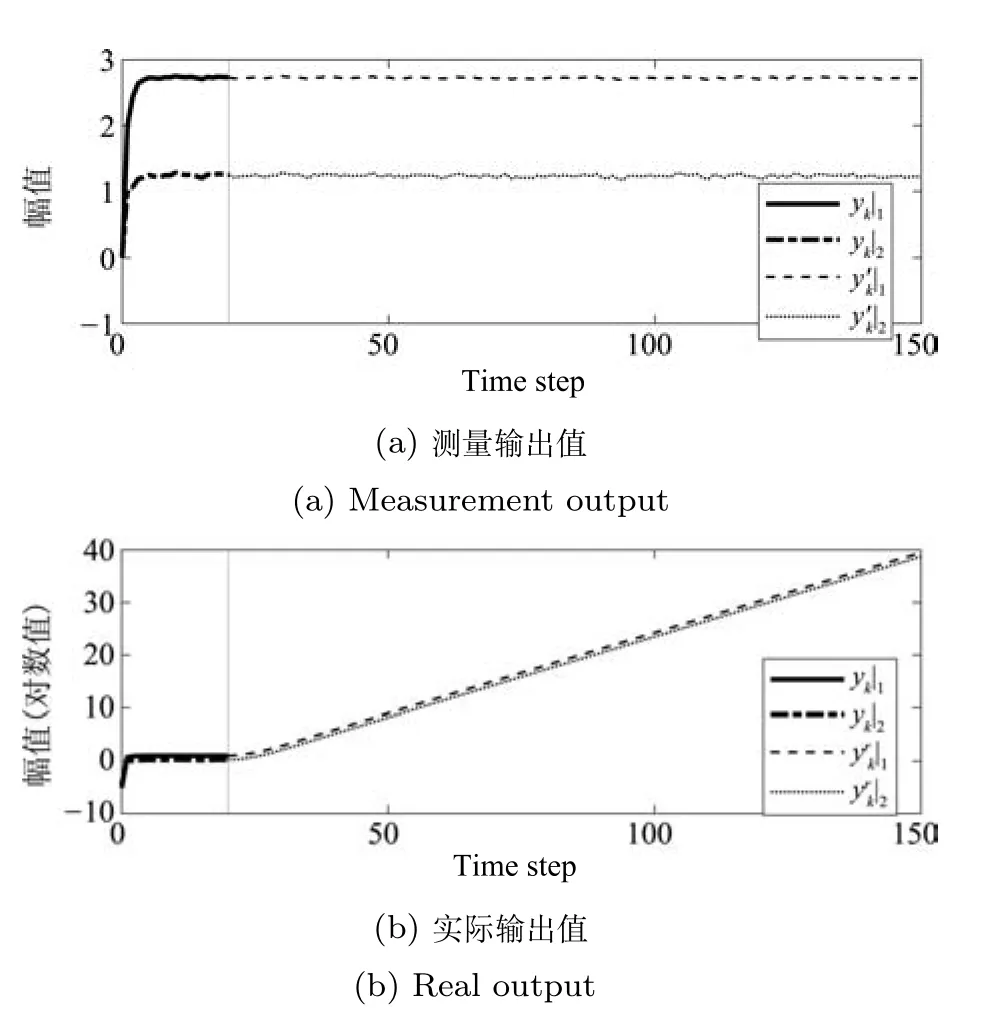
图7 FDI攻击下不稳定LTI系统输出Fig.7 Outputs of unstable LTI system under FDI attacks
考虑不同的信噪比和稳定性的受控对象LTI系统,两个仿真案例的数值结果表明文中所提出的FDI攻击协同策略能够操纵CPS稳定性,关键在于设计的攻击矩阵H和系统矩阵A的稳定性和时间参数ka的选取时机.
5 结论
本文从攻击者的角度阐述了FDI攻击对CPS稳定性的影响.基于CPS的基本控制单元,给出了具有一般性FDI攻击模型,允许攻击者同时从传感器和执行器网络注入假数据.从系统状态估计误差和残差的角度提出了FDI攻击效力模型,用来量化对CPS控制性能的影响,进而设计了FDI攻击向量的协同策略.从理论上分析了系统状态估计误差偏差量和残差偏差量变化情况,证明了FDI攻击能影响系统实际输出的收敛性而不改变系统测量输出的稳定性.数值仿真结果表明了FDI攻击可任意操纵CPS的稳定性,同时能有效躲避坏值检测器.
本文揭示了FDI攻击协同性特点,能够在网络拓扑的不同注入点(执行器终端和传感器终端)实现欺骗攻击.总的来说,与其他网络攻击的不同之处在于FDI攻击不是从物理意义上摧毁坏值检测器,而是着眼于网络信息层,误导坏值检测器做出错误检测结果而不自知;同时面向不同模型参数的控制系统,FDI攻击通过调控攻击矩阵H和时间参数ka,灵活设计假数据注入值,进而操纵该控制系统收敛于攻击者期望的任一工作点.本文也揭示了CPS系统存在严重的网络安全漏洞,威胁着各类控制管理调度系统的正常运行.未来工作,我们将提出攻击检测方案和防御策略,保障CPS安全可靠运行.
