一种基于双向匹配融合的合成孔径雷达景象匹配算法
2019-02-15伍薇苏娟
伍薇, 苏娟
(火箭军工程大学, 陕西 西安 710025)
0 引言
合成孔径雷达(SAR)成像是全天时、全天候成像的遥感方式,可弥补红外成像和可见光成像的不足,因而在精确制导武器的景象匹配导航中得到了重要应用[1]。但是,SAR景象匹配所处理的参考图和实时图可能来自不同传感器、不同微波波段、不同的成像环境,导致参考图和实时图存在较大的差异,给景象匹配带来较大的困难[2]。
景象匹配算法通常分为特征匹配和模板匹配两类算法。特征匹配算法所采用的特征主要包括点特征、轮廓边缘和区域特征等,通过建立待匹配图像中特征的对应关系确定变换参数[3]。以尺度不变特征变换(SIFT)为代表的特征点匹配方法在图像匹配方面得到了广泛应用,但SAR图像的斑点噪声使得SIFT类算法性能受到了影响。文献[4]针对SAR图像提出SAR-SIFT算法,对SIFT算法进行了改进,以改善斑点噪声对匹配的影响。文献[5]融合边缘特征和SIFT特征进行SAR图像的匹配。文献[6-7]在封闭均匀区域提取的基础上,提出了区域轮廓特征匹配方法,但要求待匹配图像中存在封闭均匀区域。特征匹配算法可克服图像旋转以及尺度变换的影响,但对共性特征提取的要求较高,且算法比较复杂,对异源SAR图像匹配的适应性和实用性有待提高。
模板匹配算法以归一化互相关(NCC)、绝对误差和(SAD)、绝对方差和(SSD)、色调映射(MTM)[8]、最佳伙伴相似度量(BBS)[9]算法为代表,该类算法通过定义图像区域相似度,通过模板窗口在参考图上滑动遍历,找到模板在参考图中的最佳匹配位置。模板匹配算法是比较成熟和常用的算法,但当待匹配图像为异源图像时,图像间的差异易使真实匹配点并不位于相似度最高的位置处,导致匹配性能下降。文献[10-11]融合相位一致性区域特征和点特征,使用NCC算法进行SAR图像与可见光图像的子块匹配;文献[12]融合特征匹配和互信息相似度测量进行图像匹配;文献[13]基于局部自相似性进行相似度测量以进行匹配和目标检测;文献[14]针对RGB图像提出变形差异相似性测度(DDIS)算法,联合图像像素的色彩信息和位置信息,对存在形变的图像、背景杂波明显和物体遮挡情况下的图像进行模板匹配。其中,NCC、SAD和SSD算法都是基于灰度的,只考虑到平移情况,MTM算法则是在此基础上综合考虑色调映射的算法,BBS算法以对图像几何形变和背景变化有较强的鲁棒性,优于以上算法,而DDIS算法以更好的鲁棒性和运行速度优于BBS算法。
SAR景象匹配中待匹配的参考图和实时图之间可能存在较大的差异,不同波段SAR图像的灰度差异、SAR图像固有的斑点噪声可能使得以灰度特征测度为主的匹配算法难以取得理想的匹配效果。同时现有的景象匹配算法均是以实时图为模板,进行从实时图向参考图的正向模板匹配,当实时图质量不好时,匹配效果易受到影响。
为削弱斑点噪声和图像差异对匹配的影响,充分利用参考图和实时图有用信息,本文提出了基于双向模板匹配的策略,既考虑从实时图到参考图的正向匹配,也考虑从参考图到实时图的反向匹配。为充分挖掘参考图中易于匹配的特征信息,在反向匹配阶段,首先基于图像局部自相似性在参考图上选取出特征丰富、易于匹配的子区,对选取的子区进行基于相位一致特征相关匹配。在正向匹配阶段,通过对DDIS算法进行改造,融入能充分表征地物性质的边缘、结构和灰度特征,避免了参考图和实时图之间的灰度差异对模板匹配的影响。
1 双向匹配融合算法
本文提出双向SAR景象匹配算法,其中正向是指从实时图到参考图的匹配,反向是指从参考图到实时图的配准,主要包括3个步骤:基于相位一致特征互相关的反向子区匹配、基于DDIS算法的正向模板匹配、双向匹配结果融合。具体算法框图如图1所示。
1.1 基于DDIS算法的正向匹配
DDIS算法为联合图像像素的色彩信息和位置信息的一种相似性测度,算法通过模板与图像窗口之间最近邻点对的个数和位置差,赋予二者不同权重计算图像之间的相似度[14]。DDIS算法是针对彩色图像提出的,为将其更好地应用于SAR图像匹配,将原始DDIS算法使用的RGB 3个通道分别用鲁棒性较好的指数加权均值比(ROEWA)边缘、结构张量以及图像灰度进行替换。具体步骤如下:
1)基于ROEWA算子计算图像的边缘强度特征。
2)计算图像的结构张量特征[15]。
3)因边缘特征、结构张量特征和灰度在数量级上有差别,对三者进行线性变换归一化至[0, 255]范围内后,将它们重构为图像的3个通道值。
4)根据(1)式、(2)式计算参考图滑动窗口与实时图的DDIS相关强度值:
κ(pi)=|{q∈Q:NNa(qk,P)=pi}|,
(1)
(2)
根据(1)式和(2)式,将实时图作为模板图像,在参考图上滑动窗口,计算其与对应窗口的DDIS值,生成相关强度图。
5)将相关强度图峰值点对应的位置作为正向匹配的结果。图2为一个基于DDIS算法的正向匹配实例。图2(a)和图2(b)分别为实时图和参考图,图2(c)~图2(f)分别为实时图、参考图的边缘强度图和结构张量图,图2(g)和图2(h)为实时图与参考图的特征重构图,图2(i)为DDIS匹配相似度图,峰值点的位置为(345,249),如图2(i)中“*”号所示,图2(j)为正向匹配结果,匹配位置的左上角坐标为(220,54),如图2(j)中“*”号所示坐标点。
1.2 基于相位一致特征互相关的反向子区匹配
1.2.1 基于局部自相似的参考图多子区选取
SAR图像中存在的重复模式和斑点噪声易导致匹配错误,为提高匹配正确率,本文拟选取图像中特征明显、信息冗余少的部分子区,代替整幅图像进行匹配。
本文采用基于图像局部自相似的准则,选取出图像中与邻域差异性较大的区域作为待匹配子区。如图3所示,将图像划分为相同大小的图像子区,将子区与邻近区域灰度相关系数的均值作为邻域相似度,即
(3)
式中:CorrC为最终赋给子区C的值;Mk表示第k个子区图像;MC表示中心子区C的图像;w、h分别为子区的长宽;(i,j)为子区位置坐标,其取值区域为子区内。
图4给出了一个子区选取实例。图4(a)中各小方框的数值为图像各子区计算得到的邻域相似度,子区大小为70×70;图4(b)为子区数为10时的子区选取情况。由图4可以看出,该方法可选取出特征明显、信息量丰富、易于匹配的图像子区。
1.2.2 相位一致性特征匹配
图像的结构信息较为稳定,在异源SAR图像之间可以得到很好的保持。图像的结构信息大部分来源于相位信息,因此,本文基于相位一致性特征互相关进行从参考图多子区到实时图的反向匹配。
相位一致性[16]是一种基于频域的特征检测方法,其依据是:在图像的Fourier谐波分量叠合最大相位处有图像的角点、边缘等特征出现。相位一致性为局部能量函数和Fourier谐波分量幅度的比值,是一个与信号特征幅值大小无相关性的相对量,因此,其对图像的光照和对比度有较好的不变性。为更好地将这一特征应用于图像,Kovesi[17]使用Log Gabor小波改进了其计算模型,并将其使用范围从一维扩展至二维。计算公式为

(4)
式中:PC(x,y)为相位一致性特征值;(x,y)表示图像中某点的坐标;Wo(x,y)为方向为o时频率扩展的权重;Ano(x,y)为图像中点(x,y)在log Gabor滤波器尺度为n、方向为o时的振幅;⎣·」为向上取整;T为噪声阈值;ε为保证分母不出现0的常数;Δφno(x,y)为一种更精确的相位偏差表示方式,通过log Gabor小波的偶对称滤波器响应值eno(x,y)和奇对称滤波器响应值ono(x,y)计算定义,即

(5)
相位一致性特征匹配算法步骤如下:
1)对参考图与实时图进行相位一致性特征计算,计算公式见(4)式和(5)式。
2)对每个子区对应的相位一致性特征值图像与实时图相位一致性特征值图像进行互相关计算,计算公式见(6)式,选取相关系数最大处对应的位置作为当前子区对应的匹配位置。
(6)

3)由各子区反向匹配位置和子区的位置关系推导得到对应的实时图在参考图中的匹配位置。
图5给出了一个基于相位一致性特征互相关的反向子区匹配实例。图5(a)为参考图,图5(b)为实时图,图5(c)为在参考图的相位一致性图像上标示的子区选取结果,图5(d)中各方框为图5(c)中各子区在实时图中的匹配位置,图5(e)中各方框为反推得到的实时图在参考图中的可能位置,表1为由各子区推导得到的实时图在参考图中的坐标位置(左上角坐标点)和对应的相关系数值。

表1 各子区匹配结果
1.3 双向匹配结果融合

层次聚类过程如下:
1) 集合M每一个元素为初始聚类中心,计算两两之间的街区距离;
2) 将两两之间距离小于阈值的聚为一类;
3) 计算聚类之后各类之间的街区距离,重复步骤2、步骤3,直至各类之间的距离均大于阈值,达到终止条件,聚类终止。
图5(e)聚类图例如图7所示,子区1、6、8对应的结果聚为一类后,聚类终止。
如图8(a)所示,矩形内部的小方框为由子区匹配后匹配坐标还原实时图在参考图中的位置示意图,如果匹配正确,则匹配位置将分布在真实匹配点的邻域内,错误匹配位置之间一般随机分布,无相关性。基于以上原理,用聚类的方法选取出坐标位置比较接近的子区匹配结果,若它们与正向匹配结果位于一小邻域内,则将二者均值作为最终融合结果。若二者位置相差远,则将正向匹配结果作为最终匹配位置。因此,本例中图8(b)匹配位置确定为融合图2(j)和图5(e)的双向匹配结果,左上角坐标位置为(191,42)。
2 实验分析
2.1 与其他同类算法的比较
为检验算法的有效性与准确性,使用本文算法对多组数据进行实验。现选取两组有代表性的数据,将本文算法与NCC、BBS[9]、SIFT、SAR-SIFT[4]算法进行对比实验。图像数据如表2所示;实验运行环境为数学仿真软件MATLAB,程序语言为C++.
数据集1中,实时图比参考图的斑点噪声严重,并且存在时相间的场景差异。数据集2中,除了斑点噪声以外,参考图与实时图存在较大的旋转差异和灰度差异。图9和图10为对比实验结果,图11给出了两组数据集上各算法的匹配误差对比。匹配误差采用以下方法计算:手动在参考图与实时图上选取20对控制点对,利用仿射变换模型计算变换矩阵并将实时图中心点进行变换,以此变换位置作为理想匹配位置,将其他算法得到的位置与理想匹配位置之差的绝对值作为匹配误差。由此可见,本文算法可克服图像小视角差异、灰度差异和斑点噪声对匹配的影响,在匹配精度上优于其他同类算法。
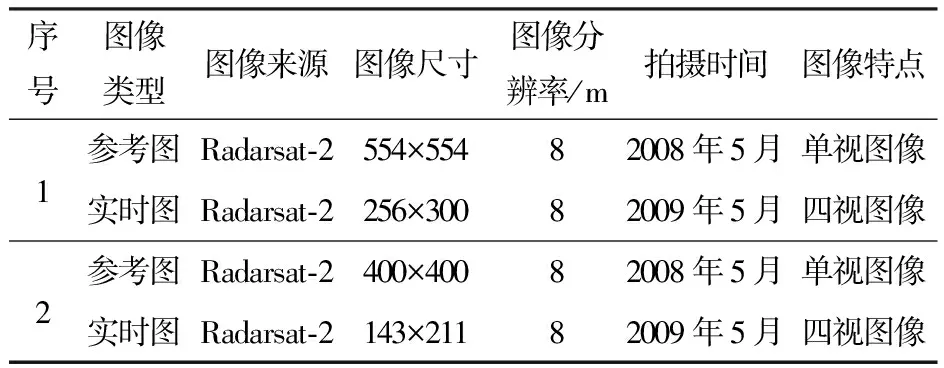
表2 数据描述
图12给出了两组数据集上各算法的运行时间对比。由图12可以看出,本文算法的计算复杂度稍大于NCC算法,匹配时间明显低于BBS、SIFT和SAR-SIFT算法。本文算法运行时间与待匹配图像尺寸有关,图12中所表示运行时间结果为正向匹配时间与反向匹配时间串行运行所得,若将算法并行运行,则算法的运行效率可得到有效提高。
2.2 图像变化对匹配性能的影响
为了对本文算法性能进行比较评价,现就斑点噪声、灰度差异、旋转差异、尺度差异和几何畸变对算法的影响进行对比实验。
本实验的实时图和参考图采用图2(a)和图2(b)所示机载高分辨率SAR图像,波段不同、时相不同,图像间存在比较明显的灰度差异和几何畸变,尺寸为512×1 102和251×391.
2.2.1 噪声差异
在实时图上添加斑点噪声,噪声方差依次为0.1~0.4,生成一系列实时图,分别与参考图进行匹配,计算匹配误差。实验结果如图13所示,横坐标表示噪声方差的数值,其中噪声方差与图像对应的信噪比如表3所示。由图13可知:随着噪声方差增大,匹配误差略有增大,但本文算法整体优于BBS和NCC算法;同时,匹配误差随噪声方差增大,曲线变化较平稳,表明本文算法对斑点噪声的适应性较好。

表3 噪声方差与信噪比
2.2.2 灰度差异


表4 图像灰度分布情况
2.2.3 旋转差异
以原实时图为准,分别逆时针旋转2°、4°、6°、8°和10°,生成相应实时图,依次与参考图进行匹配实验,并计算得匹配误差。实验对比结果见图15,横坐标表示实时图旋转的角度。由图15可知:旋转角度在10°以内时,本文算法的匹配误差基本保持在一定范围内;同时旋转角度增大时,误差有所增大,但增大的速率较缓慢。由此可知算法对图像小幅度旋转有一定的适应性,同时图像之间的旋转差异对匹配的影响较小。
2.2.4 尺度差异
以原实时图为准,分别将图像缩放0.9~1.1倍尺寸,生成相应实时图,依次与参考图进行匹配实验,计算对应的匹配误差。实验对比结果如图16所示,横坐标表示图像与原图的缩放尺度。图像的缩放尺度变化幅度相对较小时,本文算法有一定的鲁棒性,整体匹配误差均小于NCC和BBS算法。
2.2.5 几何畸变
由参考图和实时图可知,原图像对之间存在几何畸变。为量化几何畸变对匹配的影响,设定3组对比实验。第1组为原实时图;第2组为手动配准计算得到相应的仿射变换矩阵[1.001 5,0.026 5,168.436 9;-0.418 8,1.130 5,71.409 8;0,0,1],此变换矩阵可用来描述原图像对之间存在的几何畸变,以此对实时图进行变换,得到无畸变的实时图;第3组为模拟产生具有较大几何畸变的实时图,变换矩阵为[1.1,0.1,0;-0.2,0.95,0;0,0,1]。实验结果如图17所示。由图17可知,几何畸变减小,匹配误差有明显的降低。当几何畸变明显增大时,本文算法的匹配误差略有增大,表明本文算法对小幅度几何畸变的鲁棒性较好。
2.3 与单向配准算法比较
为比较图像单向匹配与双向匹配的差异,现将正向匹配结果、反向匹配结果与双向匹配结果进行比较。实验结果如图18所示。
参考图与实时图来源于不同的SAR传感器,在不同时间获取,实时图的斑点噪声严重,且二者存在较大区域内的灰度差异。图18(c)、图18(d)、图18(e)分别给出了正向、反向和双向的匹配结果。本例中正向匹配误差为4.2,反向匹配误差为2.5,双向匹配误差为1.3,由此可见双向匹配结果可有效降低匹配误差。
3 结论
本文针对SAR景象匹配中因图像差异和斑点噪声造成误匹配的问题,提出一种双向模板匹配算法。首先进行基于DDIS算法的正向匹配,其次进行相位一致性特征强度互相关的反向匹配,最后通过双向融合独立的正向和反向匹配得到最终结果。实验结果表明:
1)正向匹配在算法的鲁棒性和运行速度有优势,反向匹配优点在于匹配的精确度,二者的融合可提高匹配的准确性、鲁棒性和运行速度。
2)双向匹配充分利用了图像中地物的边缘、结构、灰度和相位等多种鲁棒的特征信息,使参考图和实时图的有用信息得到充分的利用。
3)由与经典模板匹配算法的在多种图像差异下的对比实验可知,本文算法可减弱图像自身斑点噪声和其他差异对图像匹配带来的不利影响,算法对于噪声、灰度和旋转等差异的适应性强,具有较好的鲁棒性。
