仿真智能吸痰机器人运动单元的研制
2019-02-13谭文君申存毅朱皓阳董鼎辉史爱华吴荣谦吕毅
【作 者】谭文君 ,申存毅,罗 禹 ,朱皓阳 ,马 涛 ,董鼎辉 ,史爱华 ,薛 召 , 吴荣谦 ,吕毅
1 西安交通大学第一附属医院肝胆外科,西安市,710061
2 西安交通大学先进外科技术与工程研究所,西安市,710061
3 精准外科与再生医学国家地方联合工程研究中心,西安市,710061
4 陕西省再生医学与外科工程研究中心,西安市,710061
0 引言
在临床工作中,发现人工气道内吸痰操作对于挽救危重患者生命有着重要的意义。人工气道是指将导管经过鼻腔、口腔插入到鼻咽、口咽及气道内,或插入至气管切开所建立的气道通道内。常用于有气道梗阻,呼吸困难,低氧血症,需要保证通气,或呼吸道内分泌物过多且难以自主清除分泌物等情况的患者。人工气道为生理气道和空气或其他气源之间建立了有效连接,从而有效改善患者通气功能,纠正缺氧状况,是挽救危重患者的重要手段之一[1]。但在人工气道建立的同时,一定程度上破坏了机体正常的解剖结构与呼吸道自身非特异性防御屏障功能。使得上呼吸道失去了对吸入空气加湿加热,以及对灰尘和微生物过滤功能。从而导致气道内分泌物粘稠,呼吸道纤毛运动能力下降,分泌物排出减慢等情况,易导致细菌繁殖引起的肺部感染及痰液形成增多[2]。
气道净化技术及人工气道内吸引是对因人工气道影响及咳嗽能力降低而不能有效排出气道内痰液、血液、误吸的胃内容物及其他异物进行清除与净化的手段[3-4]。气道分泌与吸引操作是挽救危重患者性命的重要手段,也是医护工作者必须掌握的常规基础操作之一。但对于分泌物多的患者,护理人员的吸痰操作频繁,占用了大量工作时间,因此国内外研究团队也曾研发过吸痰装置,2013年日本ULVAC机工株式会社研制了一种由吸痰管路及吸痰机构成的人工呼吸吸痰系统,其吸痰方式与机械辅助的吸气/呼气机类似,但操作过程较为繁杂[5]。国内山东大学齐鲁医院在2013年申请了一份名为自动吸痰型人工气道及其构成的吸痰系统(CN103330981A)专利,其设计方案中吸痰管路设置于人工气道下部,固定开口于人工气道前段位置,仅能吸引人工气道开口处的痰液,仅有痰液聚集至人工气道前段的时候才有一定的吸痰效果,无法实现吸痰操作的完整替代[6]。
面对现今医疗机器人研发的趋势,以及临床日常工作中实际面临的问题,本课题组十余年持续关注并研究医疗临床问题,采用医科与工科学科交叉共同研发医疗机器人解决临床问题,具有一定的研发基础。且吸痰操作动作相对简单便于机械模仿,前端有人工气道的保护,采用机器人实施吸痰操作,使得吸痰管的送入及吸引动作相对简单。作为医疗类机器人整体研究方向的一部分,本研究主要针对现有护理机器人研发的较少以及当前护理机器人研究中缺乏医学支持的现状,完成吸痰机器人运动单元的设计及实施,其临床应用将提高当前的医疗护理水平,造福广大医生和患者。
1 设计思路
吸痰机器人的设计理念来源于临床需求,产品研发也终将回归临床需求。本课题首先通过获取实际操作环境下的相关必要参数,从结构以及功能方面,将运用场景中的运动机理特点提取出来;将吸痰动作分析、提取、归纳为送管阶段、回退保护阶段和退管吸痰阶段。在此基础上,对吸痰机器人的运动单元进行初步设计及实施,在机械结构设计方面,吸痰机器人运动单元需要能仿真模拟人类手臂中拇指与食指的指间关节与掌指关节、腕关节及肘关节的活动。吸痰机器人的程序编写能够操作吸痰机器人运动单元按顺序完成吸痰管的夹取、推送、回退保护及旋转退管动作。将人类手臂关节、骨骼结构抽象为机械结构原件,以达到仿真模拟人工吸痰操作的目的。并通过高级吸痰练习模型所搭建的仿真模拟试验台,对吸痰机器人运动单元机械臂方案实施可行性验证。
2 基本结构
根据设计要求,采取仿真模拟的思路,对人类手臂关节结构及运动进行简化,包括:①机械手与加持器的机械结构(图1),用于模仿掌指关节实现吸痰管的夹持动作。②机械臂(图2),用于模拟人类手臂动作实现吸痰管的推送动作。由此,采用机械臂的方式展开机器人完成吸痰动作的实物设计。

图1 机械手方案设计图Fig.1 Design drawings for manipulator

图2 吸痰机器人运动单元机械臂方案设计图Fig.2 Design of robotic arm for suction robot locomotion unit
2.1 吸痰机器人运动单元机械结构
采取如图2中所示的6自由度机械臂的设计方案,机械手臂在外形上类似人类手臂,采用舵机、舵盘与支架来模拟关节活动。机械手夹持器及控制机械手的6号舵机,简化了手部结构,模拟掌指关节及大拇指与食指来实现吸痰管的夹取动作。机械手尾部的5号舵机可360°旋转实现腕关节的外旋动作模拟吸痰管的旋转动作。1号舵机控制云台及整个机械手的转动,实现肘部内旋与外旋动作。其余舵机及支架可模拟手臂的内收与外展。6自由度的机械臂,活动范围广,控制简单、活动灵活,适用于对于吸痰动作的尝试。在机械臂类型的设计和选择上,采用现有开源机械臂结构,方便易得无需耗费更多精力在创新设计新型机械臂的工作上。
2.2 吸痰机器人运动单元样机结构
完成品如图3所示,机械手夹持器及控制机械手的舵机,模拟掌指关节及大拇指与食指来实现吸痰管的夹取动作。机械手尾部的舵机可360°旋转实现腕关节的外旋动作模拟吸痰管的旋转动作。1号舵机控制云台及整个机械手的转动,实现肘部内旋与外旋动作。其余舵机及支架可模拟手臂的内收与外展。6自由度机械臂可实现吸痰所需所有动作的预期目的。

图3 吸痰机器人运动单元样机Fig.3 Motion unit prototype of sputum suction robot
根据吸痰操作力度需求选择了金属齿轮舵机TR213,其转动角度为180°,可满足吸痰机器人需要转动最大角度180°的需求。转动速度可达0.12 s/60°,推力达到5 N,满足吸痰操作5 cm/s的速度及1 N以上的力量需求。且其实现0.5°角度控制,步进角度小,控制精准。吸痰机器人的程序编写应当能够操作吸痰机器人运动单元按顺序完成吸痰管的夹取、推送、回退保护及旋转退管动作。
3 仿真模拟人实验
运用图4所示的高级吸痰练习模型模拟人来搭建吸痰机器人模拟实验平台,采用舵机控制板所控制的6自由度机械手臂遥控机器人来搭建吸痰机器人机械手方案样机,进行吸痰模拟,明确后续改进方向。吸痰机器人运动单元机械手方案可以完成吸痰动作的送入,但因吸痰管及人工气道的位置及相对位置并不固定,需要不断调节机械手位置;机械手难以找寻到下一次的夹取位置,导致吸痰管送管效果不佳。针对该问题,课题组改进设计了两个高度相同,位置平行的两个支架,用于固定气管插管及人工气道,来保障人工气道及吸痰管的相对位置固定(图5)。确保在完成推送吸痰管、松开吸痰管的一个循环后,回退到上一次夹取吸痰管的位置,再次夹取吸痰管时能够成功夹中吸痰管。从而在固定和人工气道与吸痰管的相对位置后,减少了吸痰动作的变化性,统一简化吸痰动作的方向角度,可有效完成吸痰动作。在固定吸痰动作运动的空间绝对位置后,除去用于模仿掌指关节、腕关节及肘关节的三个舵机之外,其余舵机不再需要用于调节机械臂高度及相对位置,可以从机械结构上予以简化。
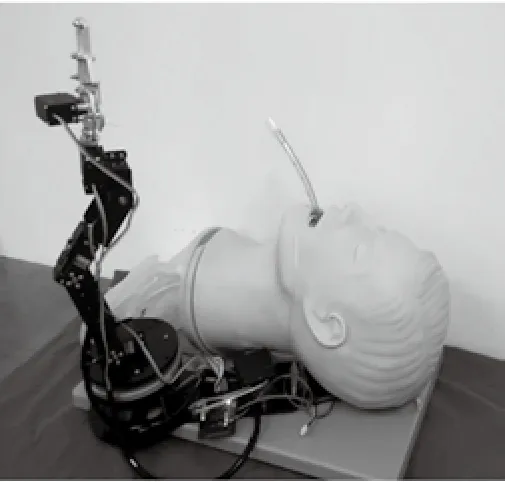
图4 吸痰机器人机械手方案模拟实验Fig.4 Simulation experiment of the suction robot manipulator

图5 吸痰机器人运动单元机械臂支架改进Fig.5 Improvement of the bracket of the robotic arm of the suction robot

图6 吸痰机器人机械手吸痰有效性验证实验Fig.6 The verification experiment of effectiveness for sucking robot manipulator
4 吸痰效果评价
为了确定吸痰的有效性,应用改进的吸痰机器人机械手进行吸痰模拟实验如上图6所示,以鸡蛋清模拟痰液,为了便于观察,在鸡蛋清中加入红色墨水。用15 mL注射器每次抽取10 mL的鸡蛋清,注射入仿真模拟人的气道中,将吸痰管与固定于吸痰机器人机械手上的负压吸引器的吸引管连接进行吸痰。在20次模拟实验中,15次实验均可成功吸出模拟痰液约6~9mL,平均可抽出7.5 mL,仅5次未成功吸出痰液。分析原因,首先是由于模拟痰液容易风干致黏稠,附着于模拟人气道壁不易吸出,其次是机械臂运动导致进管失败,为机械手运动下一步改进提供思路。仿真模拟人实验结果表明吸痰机器人运动单元机械手可实现有效吸痰。
5 结语
在外科手术围手术期内,人工气道内的吸痰操作是维持危重症患者呼吸道通畅,减少呼吸道感染和挽救患者生命的重要手段。但吸痰操作频繁、工作量大,由护士人工完成难以保证质量,集合多方面高新技术的医疗服务机器人成为了新的研究热点,因此临床工作中急需针对吸痰操作的智能仿真模拟机器人。智能吸痰机器人设计能够代替专业护理人员对患者实施高质量、高精准度的吸痰操作,可使吸痰操作更加及时有效。同时吸痰机器人的设置减少了护士与护士之间在吸痰操作动作技术学习上的差异,机器人灵活的控制程序与具有压力反馈的机械臂可避免不当操作对患者的损伤,杜绝操作伴随的潜在感染等。本研究通过临床实际运用环境调查得出需要模仿的吸痰动作及相应关节运动、吸痰实施动作的速度及力学参数、吸痰操作流程。采用仿生设计的方式完成了吸痰机器人的运动单元的设计与实施。课题组将在后续实验中对仿真模拟机器人的吸痰操作进行改进及完善,对于驱动机构以及活动度进行简化,使其未来更好地运用于临床工作中,借助吸痰机器人的操作,可减少患者痛苦,同时减轻临床护士的日常工作负担,使护士有更多时间为患者提供其它服务。
