基于长基线和超短基线联合的拖曳目标定位技术
2019-02-13吴静波程淑萍赵鹏铎
吴静波,程淑萍,赵鹏铎
1海军研究院,北京100161
2中国科学院声学研究所东海研究站,上海201815
0 引 言
水下运动拖曳目标或设备平台是海洋科学研究、勘探开发、海上试验等活动的重要工具和载体。在实际应用中,需要实时精确测量拖曳目标的水下位置。近年来,海洋测绘、海洋勘探、海上试验、舰船抗冲击试验[1]等对水下拖曳目标定位精度的要求越来越高。水声定位技术[2]是确定水下拖曳目标位置的有效手段。长基线和超短基线水声定位是2种常见的定位方法。长基线水声定位系统具有作用距离远、定位精度高等优点,并得到了广泛应用[3],但需测量船围绕目标多次运动,不便于实际应用。超短基线定位系统使用布放方便,但定位精度稍差。
为此,本文拟提出一种基于长基线和超短基线联合的拖曳目标定位技术,将甲板单元换能器和超短基线定位基阵作为长基线定位的阵元,结合超短基线定位的先验数据,获取更高精度的水下拖曳目标位置。
1 系统组成
设计了一套基于长基线和超短基线联合的定位系统,以完成水面目标与拖曳目标应答器的高精度定位测量及二者的相对态势测量,为特定需求的海上试验或作业提供技术支撑。
系统包括主测量船系统、分测量船系统和水面目标船系统(图1)[4]。主测量船系统由超短基线定位基阵、主处理单元、高精度罗经(惯导)、应答器、主控处理分机、数传电台、差分GPS组成;分测量船系统由甲板单元及甲板单元换能器、数传电台、差分GPS组成;水面目标船系统由水面目标船测量分机、显示器、差分GPS和数传电台组成。

图1 系统组成示意图Fig.1 Schematic diagram of system configuration
2 系统技术原理
2.1 整体技术原理
系统工作的最终目的是实现对水面目标船和拖曳目标的实时位置定位,其基本工作原理为:
1)通过差分GPS确定超短基线定位基阵的绝对大地GPS坐标;
2)将应答器安装于拖曳目标上,通过长基线和超短基线联合定位,确定应答器与超短基线定位基阵的相对位置,通过换算得到应答器的绝对大地GPS坐标,即为拖曳目标的绝对大地GPS坐标;
3)通过差分GPS得到水面目标船的绝对大地GPS坐标;
4)通过实时解算拖曳目标(应答器)和水面目标船两者的绝对大地GPS坐标,获取水面目标船和拖曳目标(应答器)的实时位置态势。
系统海上实施配置示意图如图2所示。

图2 系统海上实施配置示意图Fig.2 Schematic diagram of system offshore implementation configuration
2.2 分系统工作原理
利用主测量船、分测量船和水面目标船上安装的数传电台实现各系统的实时数据交换。
在主测量船上,超短基线定位基阵固定在布放回收装置下端,使用时放入水中,差分GPS的天线和高精度罗经均安装在回收装置顶部并与其刚性连接。其中,差分GPS实现超短基线定位基阵的绝对大地GPS坐标测量,并将数据传送至主控处理分机;高精度罗经完成主测量船的横摇及纵摇测量,为水声定位提供姿态数据。拖曳目标上安装应答器,超短基线定位基阵发送声学询问信号,应答器收到询问信号后发射应答信号,并由超短基线定位基阵接收,利用超短基线定位原理对应答器位置进行初步解算,信息进入主控处理分机,后与分测量船甲板单元的测距信息融合,进行长基线定位解算,得到高精度的拖曳目标(应答器)相对位置。最终由主控处理分机联合解算超短基线定位基阵绝对大地GPS坐标和拖曳目标(应答器)与超短基线定位基阵相对位置,得到拖曳目标(应答器)的绝对大地GPS坐标。
在分测量船上安装甲板单元及甲板单元换能器,采用甲板单元换能器发送询问信号并接收应答信号,利用甲板单元进行时延解算和测距解算,通过无线数传电台将解算结果发送至主测量船。
水面目标船的实时绝对大地GPS坐标由差分GPS及水面目标船测量分机进行测量,通过无线数传电台将结果发送至主测量船。
基于上述分系统获取的信息,主控处理分机可实时测量水下拖曳目标(应答器)、水面目标船、主测量船、分测量船的位置以及相对态势,相关信息可根据需要在主测量船、分测量船和水面目标船的任意一艘或几艘船上进行实时显示,为试验提供各目标的实时定位信息。
2.3 超短基线定位原理
超短基线定位根据应答器发射信号到达各接收基阵阵元的时延差来计算应答器到接收基阵的斜距,进而进行目标定位解算[5-6]。
设定位基阵的4个阵元构成的左手直角坐标系为基阵坐标系,其中1号和3号阵元在x轴上,2号和4号阵元在y轴上,基阵的中心为坐标原点,阵元间距为D(指1,3阵元间距和2,4阵元间距)。设目标位于S点,其在基阵坐标系下的坐标为(x,y,z)(图3)。

图3 超短基线定位原理示意图Fig.3 Schematic diagram of positioning principle for ultra short baseline

式中:α为目标径矢与x轴的夹角;β为目标径矢与y轴的夹角;R为目标斜距。
超短基线定位基阵尺寸相对于目标斜距很小,入射波可近似为平面波,则有

式中:c为水中声速;τx为x轴1,3阵元接收信号的时延差;τy为y轴2,4阵元接收信号时延差。
综合式(1)和式(2)可得

式(3)为超短基线定位解算的基本公式。其中,接收信号的时延采用相位修正法估计。R通过4个阵元接收信号的时延平均值计算,因此时延是主要测量值。
采用这种测量方式可得到在基阵坐标系下的声源位置。在载体质心地理坐标已知的条件下,再通过坐标变换,将基阵坐标系下的目标坐标转换为大地坐标系下的坐标。
2.4 长基线定位原理
长基线定位系统的定位原理如图4所示。设长基线各阵元的坐标为(xi,yi,zi),目标的坐标为(x,y,z),各阵元到目标的传播时延为ti,长基线水声定位原理的定位模型描述为[7]


图4 长基线定位原理示意图Fig.4 Schematic diagram of positioning principle for long baseline
水下目标的深度(应答器深度)通过应答器自带的压力传感器测量得到。若目标深度z已知,3个球面交汇,即可确定空间未知量(x,y)。若减少1个阵元,则出现双解现象,需根据先验知识,剔除其中1个不合理的位置解。若有冗余阵元,利用冗余阵元的信息可进一步提高定位精度。
还可采用Matlab中的fsolve()函数求解非线性方程组的方法解算目标位置。Matlab中fsolve()函数的调用格式为

式中:X为返回的数值解;'fun'为用于定义需求解的非线性方程组的函数文件名;X0为求根过程的初值;'option'为最优化工具箱的选项设定。最优化工具箱提供20多个选项,用户可以使用'optimset'命令将它们显示出来。如果想改变其中某个选项,则通过调用optimse(t)函数来完成。
解算目标位置时,Matlab中fsolve()函数的调用方法为

其中,迭代逼近的条件为

式中,(x0,y0,z0)为目标位置迭代的初始值。初始值越接近真值,迭代结果越准确。
2.5 长基线和超短基线联合定位技术
与超短基线和短基线相比,长基线的定位精度更高。但是由于基线长度较长,一般在几百米到几千米量级,定位基阵布放回收的工作量较大,不便于布放实施。而超短基线定位基阵的尺寸只有十几厘米,布放实施简便,但是定位精度相对较低。因此,在定位精度要求不高时,可以仅采用超短基线进行目标定位。在定位精度要求较高时,采用超短基线作为长基线定位的其中一个阵元,以减小长基线布放实施的难度;将甲板单元换能器作为长基线的另一个阵元。将超短基线的定位结果作为长基线的先验数据,即作为长基线迭代逼近的初始值,然后采用长基线定位进一步提高目标定位精度。采用两种方式联合定位可以提高系统使用的简便性和灵活性。
系统工作参数设置如下:超短基线定位基阵的基线长度为0.12 m,接收信号的信噪比为20 dB,航向角测量误差为0.5°,纵摇角和横摇角测量误差为0.3°,安装角度偏差为0.3°,基线长度误差为0.002 m,声速相对误差为2‰,GPS定位误差为1.5 m,目标方位约为45°。在不考虑基线正交角度偏差时,定位误差随目标斜距的变化关系如图5所示。由图可见,当斜距小于300 m时,水平定位误差<4 m;当斜距大于300 m时,仅采用超短基线定位系统的水平定位误差≥4 m。
采用长基线和超短基线联合定位时,将超短基线的定位结果(xs,ys)作为长基线迭代定位的初始值X0,即

然后利用式(9)进行长基线定位:

图5 超短基线水平定位误差随目标斜距的变化关系Fig.5 Variation of horizontal positioning error of ultra short baseline with target slant distance

式中,(xc,yc)为联合定位的目标位置,采用Matlab中的fsovle()函数进行解算。
对长基线和超短基线联合定位方法进行仿真。设定甲板单元时延测量精度为0.15 ms。在进行长基线定位时,分别将超短基线定位基阵和甲板单元换能器当作长基线定位的阵元,因此超短基线定位基阵和甲板单元换能器之间的间距即为2个阵元长基线阵的基线长度。设基线长度为500 m,设定长基线定位基阵2个阵元的坐标分别为(0,0)和(500,0),定位区域为500 m×500 m。将超短基线和甲板单元换能器阵元上方的阵内区域分割成20 m×20 m的网格,统计网格所有节点的水平定位均方根误差,定位误差大小以颜色来标记。图6为长基线和超短基线联合定位精度的仿真结果,其中2个黑色的圆圈表示阵元的坐标位置。
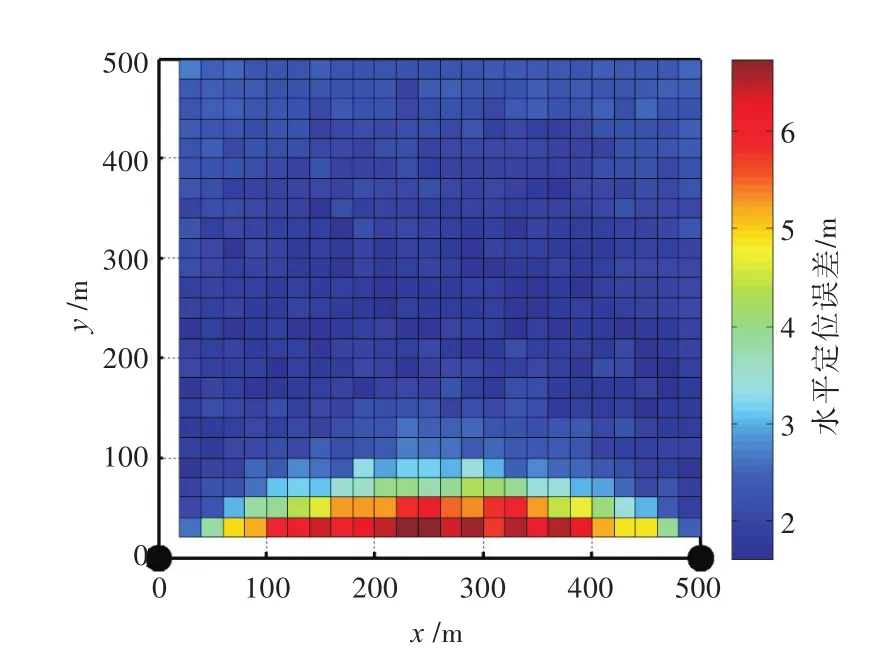
图6 长基线和超短基线联合定位精度的仿真结果Fig.6 The simulation result of joint positioning accuracy of long baseline and ultra short baseline
由图6所示的仿真结果可见,在基线长度为500 m时,当目标坐标y<100 m时,采用长基线定位的水平定位误差>4 m,这时斜距<300 m以内的区域内可以采用超短基线定位系统进行水下目标定位,即可达到水平定位误差<4 m;当目标坐标y≥100 m时,采用超短基线和长基线联合定位,即可达到水平定位误差≤4 m的要求。
3 试验分析
3.1 千岛湖试验
采用长基线和超短基线联合定位系统在千岛湖进行了定位精度验证试验。湖上试验时,在主测量船上安装了超短基线定位系统,将其布放于水下5 m左右,定位基阵的正上方安装GPS天线。在分测量船上安装甲板单元及甲板单元换能器。甲板单元换能器布放于水下5 m左右。甲板单元换能器的正上方安装GPS天线。在主测量船和分测量船的桅杆顶部架设数传电台天线,用于定位系统间的无线数据传输。
在运动过程中,难以确定水下拖曳目标真值。因此,在考核拖曳目标的水平定位精度时,采用定点目标定位考核机制(原理相同,不影响试验验证)。即在应答器上悬挂铅块,通过钢丝绳软吊在水面目标船的舷侧水下15~40 m,应答器正上方安装GPS天线,记录应答器的水平位置。试验时,水面目标船和分测量船的位置保持不变,而主测量船相对应答器由近及远运动。首先启动超短基线进行定位,然后启动超短基线和长基线的联合定位,并对比定位结果(图7)。


图7 主测量船轨迹和应答器的定位轨迹Fig.7 Main measurement ship trajectory and transponder positioning trajectory
统计如图7所示的应答器的定位偏差,可得采用超短基线时的定位偏差均方根值为6.8 m;采用长基线和超短基线联合定位时的偏差均方根值为2.5 m,定位精度得到大幅提升。
3.2 海上试验
在某海上试验中,采用长基线和超短基线联合定位系统对水下拖曳目标进行实时定位。拖曳目标位于目标船右舷。试验开始后,水面目标船、主测量船、分测量船以指定航向和规定的相对距离航行。对布放与拖曳目标上的应答器进行实时定位以获取拖曳目标的实时位置。试验结果表明,水平定位偏差为1.05 m,纵向定位偏差为1.565 m,满足系统的定位精度≤4 m的要求。
4 结 语
本文提出了一种基于长基线和超短基线联合的定位技术,并将该方法应用于湖上和海上拖曳目标定位精度测试试验。湖上拖曳目标定位试验结果表明,该技术能够较好地提高水下拖曳目标的定位精度。海上拖曳目标定位试验表明,该技术一方面可以利用超短基线定位易于布放实施的优点,便于海上试验和作业,另一方面又可以实现长基线定位精度较高的优势,综合了2种定位方式的优点。同时,在对精度要求不高的情况下,还可以仅通过超短基线技术进行目标定位,增加了使用的灵活性。结合差分GPS定位技术,可实时显示水下拖曳目标、水面目标船、主测量船、分测量船的位置以及相对态势,为特定需求的海上试验或作业提供技术支撑。
