基于Lyapunov稳定性的船舶航向保持控制器非线性反馈改进
2019-02-13马超张显库杨光平
马超,张显库,杨光平
大连海事大学航海动态仿真与控制实验室,辽宁大连116026
0 引 言
在海上航行的船舶为尽快到达目的港,降低航行途中的燃料消耗,最为理想的航行方式就是沿着计划航线航行。但因风、浪、流等的影响,一般船舶很难沿计划好的航线航行。因此,设计具有强鲁棒性的控制器以克服外部扰动,对于保证船舶沿设定的航线航行十分必要。
针对这一问题,众多学者提出了很多先进的控制算法。其中,反步递推算法是解决非线性控制问题的一种典型方法,也是近几年船舶运动非线性控制领域的研究热点[1],在该研究中,出现了许多采用混合方法增加其适应性或鲁棒性的研究成果。例如,张显库等[2]将反步递推算法与鲁棒控制算法相结合,使得算法的鲁棒性得以提高,在将上述算法应用到船舶航向保持控制中后,取得了较好的仿真结果。在使用反步递推算法设计非线性控制器时,一般分为两步或是多步。如果被控对象复杂,最后的非线性控制器未定参数多,则设计过程复杂,用常规的反步递推方法设计出的非线性控制率一般都对消了系统的非线性项[3-4]。董文瀚等[5]提出了一种直接模型,其通过参考反步递推自适应控制系统结构,克服了传统自适应律引入规范化信号后使系统过渡过程品质下降的缺点[6]。张显库[7]在使用反步递推方法设计船舶航向保持控制器的问题上做出了贡献。随后,张显库[8]通过构造简单的Lyapunov函数,将非线性控制器的设计过程由两步简化为了一步,并且设计出的非线性控制律保留了系统的非线性项,但其仿真实验仅用简单的白噪声模拟了风浪的影响。本文运用文献[8]设计的控制器在复杂风浪模型下进行仿真实验,发现其控制效果不是特别理想。为了改进控制效果,减少系统能耗,本文拟在文献[8]所设计控制器的基础上,引入非线性反馈,即使用指数函数处理后的航向误差代替航向误差本身,设计基于Lyapunov稳定性原理的具有非线性反馈的控制器,并将所设计的控制器用于“育鹏”轮船舶模型,实施航向保持控制。
1 船舶模型的建立与验证
以大连海事大学的校船“育鹏”轮为例,参考文献[1,9],建立“育鹏”轮Nomoto船舶运动响应模型,如图1所示。图中:δ为舵角;δr为舵角输入;δe为舵角误差;为转舵速率;为最大转舵速率;δD为干扰;ψ为航向;为转向速率;s为拉普拉斯算子;k为旋回性指数;T为追随性指数。
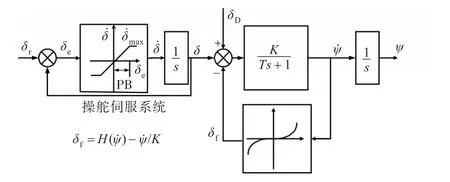
图1“育鹏”轮非线性船舶模型Fig.1 The nonlinear model of ship Yu Peng
其非线性二阶Nomoto船舶运动响应模型如式(1)所示。

采用表1所示“育鹏”轮的船舶压载状态数据,利用Matlab软件的Simulink工具箱,对建立的“育鹏”轮非线性Nomoto船舶运动响应模型进行压载右旋回仿真实验,并与实船压载右旋回测试进行对比,结果如图2所示。
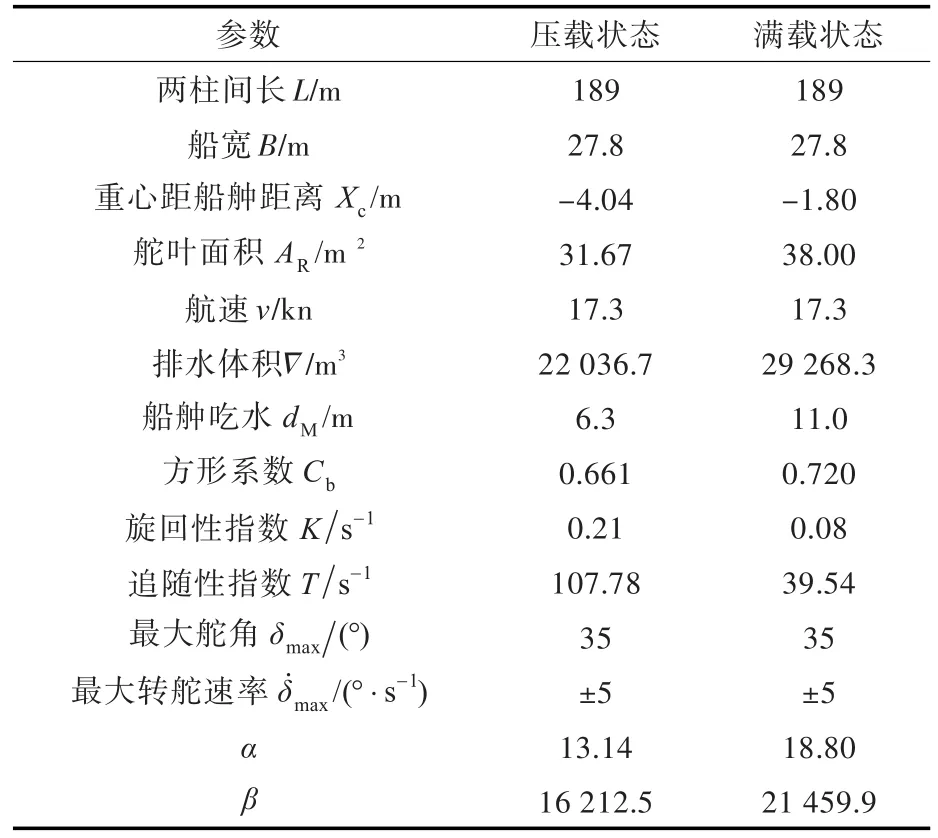
表1“育鹏”轮船舶参数Table 1 Parameters of ship Yu Peng

图2 船舶右旋回仿真实验与实船测试对比Fig.2 The comparison of simulation and real ship test for ship Yu Peng
仿真得到的横向战术直径为3.10L,实船测试所得横向战术直径为3.34L;二者所得的纵向战术直径基本相等。经对比可得,仿真结果的横向符合度为92.8%,整体符合度为96.0%,实验结果验证了模型的有效性[10]。
2 控制器的设计
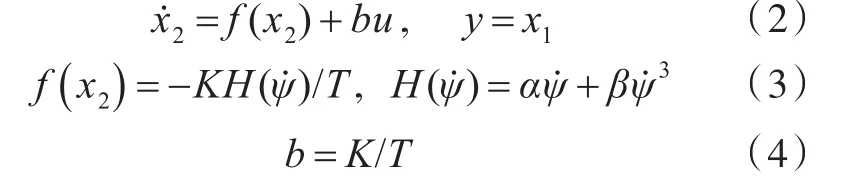
式中:y∈R,为系统输出;u为要设计的控制律,u=δ。
令

若最后的控制器镇定状态变量为z1和z2,则原系统在平衡点x1=ψR,x2=r=0处达到一致、渐近稳定。
构造一个Lyapunov函数:

设计船舶非线性控制律,使实际船艏方向ψ跟随期望航向ψR。令x1=ψ,
由于z1和z2之间存在微分关系,若z2被镇定到平衡点0处,则z1同时也被镇定[8]。这是因为若z2被镇定到平衡点0处,即,则x1为定值,同时ψR也为定值,由此可知z1同时被镇定。
z1和z2之间的这种微分关系在实际系统中有一定的普遍性。为简化设计过程,构造V1时没有包含z1的信息,但要保证适当选择控制律,使中含有z1。最后,同时镇定z1和z2。


式中,k1>0,ω>1,两者均为控制器设计参数。

将式(11)代入式(10),由式(2)~式(9),可得

根据Young式不等式[12],下列不等式成立:

将式(13)代入式(12),有
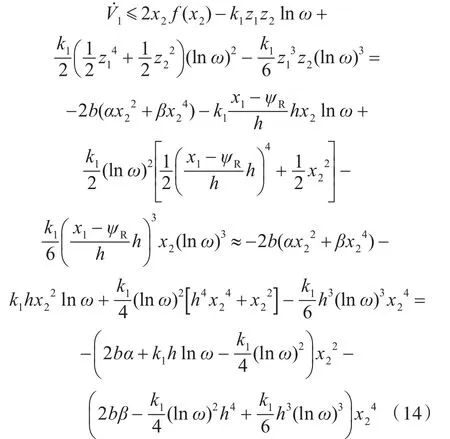
式中,h为系统采样周期。式(14)中,用x2来近似并非严格遵循数学上导数的定义,但其在控制工程中是可以接受的。
因为b,α,β均大于0,所以只要下列不等式成立,

通过求解不等式(15)~式(16),有
仿真实验的采样周期一般满足h≤1 s,本文选取的采样时间h=0.2 s,满足要求。此时,系统设计参数ω在区间(1.35,2.23)内必能保证恒成立。
由Lyapunov稳定性定理可知,本文所设计的控制律(式10)能够使整个系统被镇定,从而系统在平衡点x1=ψR,x2=0处达到一致渐近稳定。式(10)的非线性控制律求解过程只构造了一个Lyapunov函数,且控制律中只有2个待定参数k1,ω,控制器设计过程和参数选定均较简单。
3 船舶压载仿真实验及分析
以大连海事大学的“育鹏”轮为例进行仿真实验,图3给出了未加非线性反馈的系统仿真框图。在图3所示的系统中,操舵伺服系统是由舵机延迟、最大舵角饱和限制、最大舵速限制和积分环节组成。考虑到船舶实际航行时航向受风、浪的影响,仿真时加入了6级风浪干扰,得到了有海浪干扰的仿真结果。航行中风的情况比较复杂,为了准确描述风对船舶航行的影响,本文将风的干扰等效描述为一个白噪声和代表相应风级的等效舵角的合成[13]。根据文献[1,13],计算得到“育鹏”轮在6级风且风舷角为30°的情况下,风的等效舵角δwind=0.8°。6级风引起的海浪干扰用白噪声驱动的二阶振荡环节[0.419 8s/(s2+0.363 8s+0.367 5)]描述。

图3 系统仿真框图Fig.3 The diagram of simulation system
应用图3所示的系统进行仿真实验,输入期望航向60°,为了得到更好的控制效果,调整控制器参数k1。仿真实验中,当控制器参数k1=0.003 5时,控制效果最优,如图4和图5中蓝线所示,分别表示反步递推非线性控制器控制下的船舶舵角效果和航向保持效果。由此可知,船舶转向至60°,调节时间约为250 s,操舵最大幅值35°,超调量8°。

图4 压载时的舵角效果Fig.4 Simulation results of the rudder angle in ballast condition

图5 压载时的航向保持效果Fig.5 Simulation results of the course-keeping in ballast condition
舵的能耗体现在操舵平稳性、动舵(0.5°以上)次数、作用时间和舵叶转动幅度等上[14]。本文应用平均舵角(其中t0=0 ,tn1为调节时间)来考虑系统能耗[15],得到系统的平均舵角
为优化控制,解决系统能耗较多的问题,受文献[16]的启发,保持控制器不变,在系统中引入了非线性函数反馈,即使用非线性指数函数处理后的航向误差代替航向误差本身,来作为控制器的输入信号。系统设计如图6所示(图中,ωu-1为指数函数的反馈项,d为干扰)。进行仿真,并调节指数函数的参数ω以得到最优的控制效果。当取参数ω=1.7时,利用Simulink工具箱进行仿真控制的效果最优,如图4和图5中红线所示,分别表示具有非线性反馈的控制器控制下的船舶舵角效果和航向保持效果。由此可知,船舶转向至60°,调节时间约为200 s,船舶操舵最大幅值35°,超调量 5°,计算得到平均舵角为量化两者间的能耗差异,引入了节能比P的概念。

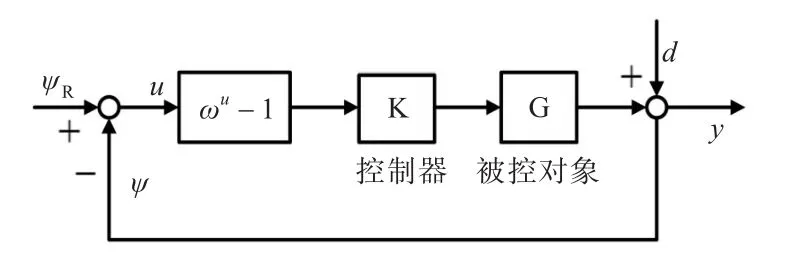
图6 非线性反馈系统Fig.6 Diagram of the nonlinear feedback system
由两次仿真结果的对比可知,引入指数函数非线性反馈后,控制器的控制效果更好,其节能比达16.1%。
为了验证非线性反馈控制器的控制效果及节能情况,又分别对20°,40°,60°,80°和100°下的航向保持进行了仿真实验,得到的数据如表2所示。由表2中数据可知,引入指数函数非线性反馈控制后,在整个控制过程中,调节时间缩短,平均舵角更小。说明改进后的控制器其控制效果更加优异,系统更加节能。

表2 2种控制方式对比Table 2 The comparison of control effects between two methods
在船舶实际航行过程中,存在着频繁转向的情况。为研究改进后控制器的控制效果及节能情况,本文进行了船舶航向跟踪仿真实验。仿真环境与图3所示系统相同,输入航向为(0±20)°,频率0.009 rad/s。仿真结果如图7和图8所示,其中蓝线表示反步递推控制器控制下的船舶舵角效果和航向保持效果,红线表示具有非线性反馈控制器控制下的船舶舵角效果和航向保持效果。由图7可知,引入指数函数非线性反馈后,系统的超调量减小,稳定时间缩短,说明改进后的控制器的控制效果更加优异。由图8可计算得到,引入指数函数非线性反馈前,整个控制系统的平均舵角,引入指数函数非线性反馈后,平均舵角节能比高达 41%。由此进一步证明,引入指数函数非线性反馈改进后的控制器的控制效果更优,且系统更加节能。

图7 航向跟踪时的航向保持效果Fig.7 The course-keeping effect of ship during the course-tracking

图8 航向跟踪时的舵角效果Fig.8 The rudder effect during the course-tracking
为了验证改进后的非线性反馈控制器的鲁棒性,经查阅船舶资料,通过计算得到“育鹏”轮满载时的船舶数据及其非线性Nomoto模型的参数,详见表1。利用表1所示数据进行船舶转向至60°的仿真实验,结果如图9和图10所示。其中蓝线为反步递推控制器的控制效果:整个控制过程中最大舵角为 35°,调节时间约 130 s,超调量 3°;红线为改进的非线性反馈控制器的控制效果:整个控制过程中最大舵角为35°,调节时间约130 s,无超调现象。由此可知,在船舶装载状态发生改变的情况下,本文所设计的改进的控制器的控制效果依然良好,且系统具有鲁棒性。
4 结 语
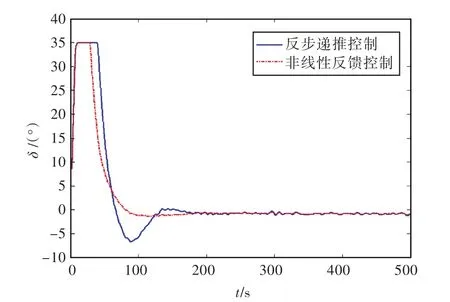
图9 满载时舵角效果Fig.9 Simulation results of the rudder angle in full-loaded condition
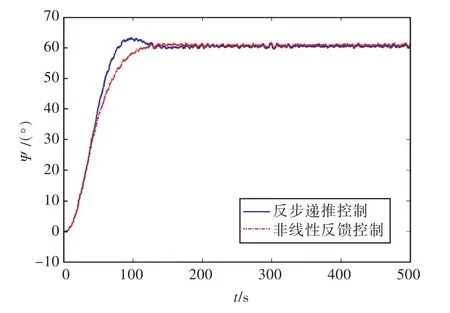
图10 满载时航向效果Fig.10 Simulation results of the course in full-loaded condition
为了设计控制效果更加优异的控制器,本文将指数函数非线性反馈引入到了反步递推控制算法中,从理论上证明了引入指数函数设计的控制器满足Lyapunov稳定性要求,同时,整个控制器的设计过程比较简单。文章以“育鹏”轮为例进行了仿真研究,结果表明,具有非线性反馈的控制器在风浪模型下仍具有较好的控制效果。在整个仿真过程中,控制器能很好地响应操舵指令,操舵平均舵角较小,很好地保护了舵机,节约了能量。同时,“育鹏”轮的满载仿真实验结果表明,具有非线性反馈的控制器具有很好的鲁棒性能。在后续的实验中,作者应用本文设计的控制器对其他种类多艘船舶的航向保持控制进行仿真实验,皆取得了很好的控制效果。
