DAVA在航天器内声场控制中的研究进展
2019-02-06原凯张忠高博秦朝红任方侯传涛
原凯,张忠,高博,秦朝红,任方,侯传涛
(北京强度环境研究所 可靠性与环境工程技术重点实验室,北京 100076)
航天飞行器在飞行过程中受到各种噪声影响,如起飞阶段的喷流噪声、主动飞行段的气动噪声等。宽频带随机噪声作用在火箭整流罩、仪器舱等结构上,会向内部辐射高量级噪声,一方面导致卫星有效载荷、设备等环境适应性下降,另一方面对于载人航天,强噪声会影响航天员的舒适性,严重时会影响航天员的身体健康。随着航天领域的快速发展,新一代运载火箭将采用轻质、低阻尼的整流罩结构,同时推力越来越大,使航天器内声场环境更加恶劣,航天领域的噪声问题更加突出,其噪声控制技术的发展也将会更加迫切。航天领域的振动噪声控制具有其独特性:航天领域中噪声量级更大、频段范围更宽;对振动噪声控制装置的质量要求更高;对振动噪声控制装置的尺寸有更高的要求。因此传统的噪声控制方法无法获得很好的控制效果。国内相关研究进展比较缓慢,还未出现针对航天领域的噪声主被动控制新器件。
为了实现航天器内声场控制,国内外开展了大量的噪声主被动控制研究工作。航天器内噪声控制技术可分为被动控制和主动控制。目前常用的被动控制方式为声能转换热能的机理,因此只适合于中高频降噪,对于增加声阻抗以及反应控制则技术复杂,对频率敏感。因此被动控制不适于低频噪声控制。主动控制适合在宽频带内对噪声进行控制,包括主动噪声控制(Active Noise Control,ANC)和结构声主动控制(Active Structural Acoustic Control,ASAC)。ANC通过声学消声控制噪声,适合于低频降噪;ASAC通过控制结构声辐射,可以在宽频范围内进行声场控制。分布式主动吸振器(Distributed Active Vibration Absorber,DAVA)是20世纪末出现的一种新型的声场控制智能装置,通过被动式吸声材料吸收高频噪声和主动式作动器抑制低频噪声,兼具被动和主动的特性。与传统的降噪方式相比,降低了飞行器对降噪装置的载荷、尺寸限制,且更易实现高量级、宽频带、低功耗的噪声控制,在航天器内噪声控制中具有广阔的应用前景。
文中介绍并梳理了DAVA在航天器中的研究进展情况,对DAVA在火箭整流罩内声场控制中的发展 前景进行了展望。
1 DAVA发展及应用
为了控制航天器内宽频带噪声,美国国家航空航天局(NASA)、空军研究实验室(AFRL)、海军研究实验室(NRL)、弗吉尼亚理工大学等国外机构均开展了噪声控制技术研究,并形成了声学覆盖层、约束阻尼层(CLD)、亥姆霍兹共鸣器、分布式吸振器(DVA)、调谐吸振器(TVA)、被动声振衰减装置(PVAD)、自适应声振衰减装置(AVAD)等降噪产品,部分产品已经成功应用于运载火箭中[1-7]。航天器内声场的各类降噪方式见表1,可以看出,最初主要采用被动方式来满足航天器降噪要求,但只在中高频段得到较好的应用效果。为了对低频噪声进行控制实现宽频带降噪,逐步发展了声场的主动降噪,DAVA即是航天器内声场控制中新发展的一种主被动一体化降噪装置。
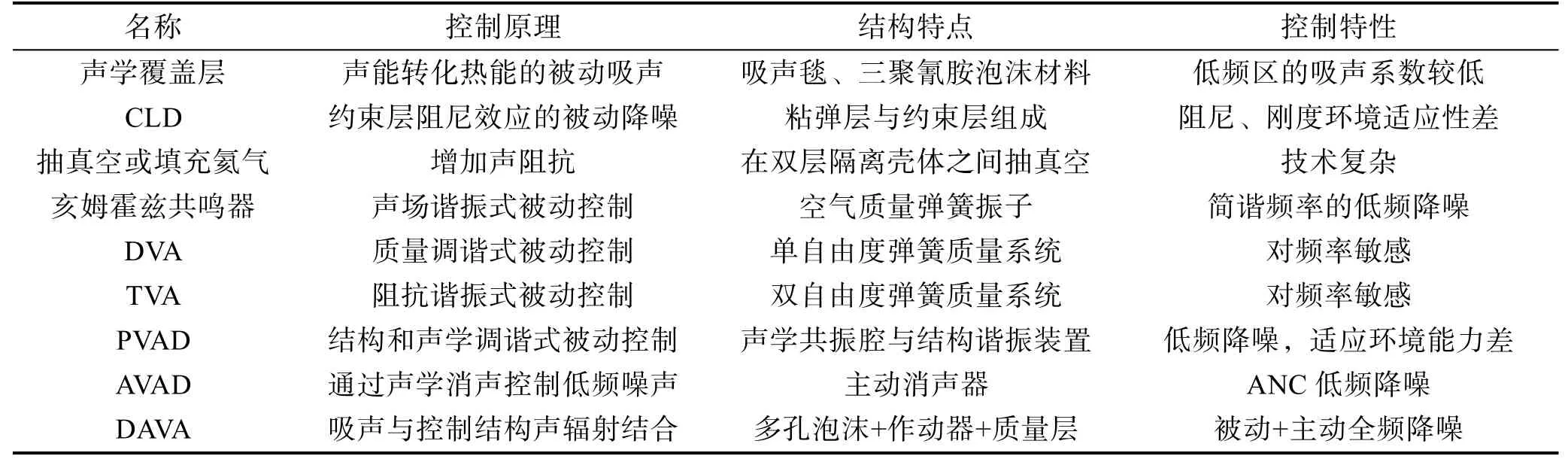
表1 航天飞行器内声场降噪方式对比
1.1 DAVA发展历程
DAVA是在ANC基础上发展而来。1992年,Bustamante等[8]通过次级扬声器进行阻抗匹配研究了ANC方法。Hansen、Kuo等[9-10]通过实验分析提出了自适应工作原理和用于ANC的控制算法。Bolton[11]理论证明了在多孔吸声泡沫表面层施加适当的力能够提高低频吸声性能。1997年,S.Beyene等[12]通过将吸声材料与扬声器组合,实现了宽频带内的主动吸声。之后H Zhu等[13]将次级扬声器换成薄板,让薄板振动的声辐射阻抗和空气阻抗相匹配,完成主动吸声,形成DAVA声场控制原理。基于以上研究成果,20世纪末,弗吉尼亚理工大学振动与声学实验室(VAL)开展了DAVA装置的研发。Fuller[14-16]采用Rayleigh-Ritz变分公式建立了DAVA的单自由度弹簧质量系统的解析模型,设计的DAVA装置如图1所示。DAVA与其他噪声控制装置相比具有很多优势:在未主动控制状态下,DAVA相当于DVA,利用质量层在高频振动下的惯性产生阻尼效应;当固有频率与激励频率调谐时,实质是将单点TVA的质量和弹簧效应分布在结构上,弹性层采用主动控制的方法,解决了CLD的粘弹层阻尼、刚度受温度和频率影响较大的设计困难,扩宽了被动降噪的控制频率范围。

图1 带主动弹性层的DAVA装置
由于PVDF薄膜智能材料的声抵消是在其声学边界上使得材料的表面声阻抗和入射声信号的特性阻抗动态匹配,即在消声材料的表面处不会产生反射,力学性能优异,因此被用于DAVA的主动弹性层。Cambou[17]发现分布式振动控制要比单谐振子更加高效,于是采用正弦曲线式的PVDF构型代替主动弹性层,如图2所示,并用遗传算法优化了质量层分布,用带曲线式PVDF的DAVA装置对梁的振动辐射噪声进行了控制,如图3所示。这种正弦曲线式的PVDF单元使弹性层刚度过大,往往需增加质量来降低控制频率,而且其较差的阻尼特性不利于宽频带的噪声控制。
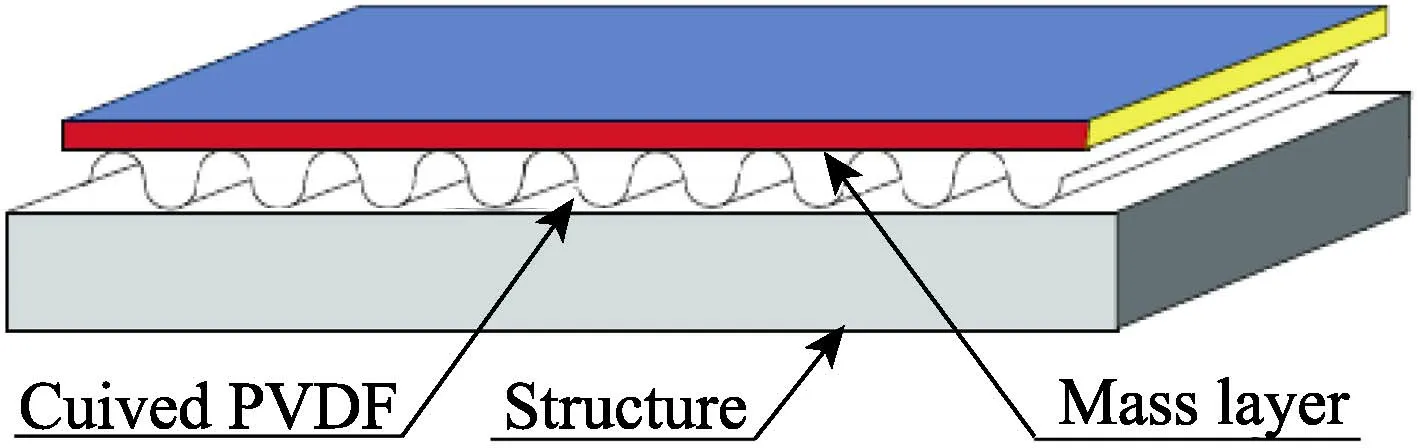
图2 带曲线式PVDF的DAVA

图3 实验布置
为了在宽频范围内实现高效的噪声控制,Fuller[18]在吸声泡沫内部插入28 μm镀银聚偏氟乙烯(PVDF)薄膜,采用自适应控制方法设计了一种“智能泡沫”装置,构成了现代DAVA的雏形,并试验观测了这种自适应装置的低频吸声效果。1997年,Gentry[19]证明了智能泡沫降低结构振动辐射噪声的能力,Griffin、Guigou等[20-22]在泡沫材料轻质化、PVDF段离散极化等方面开展了相关研究。2000年,Marcotte等[23-25]开发了改进的DAVA“智能泡沫”装置,由多孔泡沫、PVDF薄膜和质量层组成,如图4和图5所示。多孔泡沫提供分布式弹簧力,实现中高频被动吸声,PVDF薄膜提供主动控制力实现低频噪声抑制,整个结构厚1.3 cm,占被控制结构质量的7%。对比不同状态下的传感器信号衰减结果,当DAVA处于未控制状态时,相比无DAVA的情况,275 Hz峰值频率处有大幅衰减。因为未主动控制状态下的DAVA相当于调谐质量阻尼器(TMD),通过质量调谐了低频振动模态。同时由于振动时质量层带来的阻尼效应,削减了高频共振峰值。当DAVA处于主动控制状态,同时结合吸声材料的被动吸声特性,使得声功率在200~800 Hz范围内降低了18 dB。将设计的不同材料和质量的DAVA与主动约束阻尼层(ACLD)的振动衰减进行了对比,结果表明,同等质量下,DAVA和ACLD效果接近,但DAVA能显著减少控制能量的消耗。
针对DAVA在50 Hz较低频处输出功率较低的问 题,采用激振器替代压电材料输出较大的控制力。Harris[26]参考扬声器结构设计,在三聚氰胺泡沫中加入电线圈和稀土永磁铁等,让永磁铁而非线圈运动,成功设计了两个单自由度弹簧质量系统相互耦合的多谐振DAVA装置,如图6所示,在高声压级下可控制50~200 Hz低频噪声。Stephen等[27]在DAVA顶部加入如图7所示的轻质电磁激振器,并将DAVA与主动扬声器结合形成了ASAC控制系统,如图8所示。研究表明,通过改变DAVA顶板厚度可以调节谐振频率,使ASAC系统在低至50 Hz频率处达到很高的效率。Lane等人[28]设计了如图9所示的DAVA装置,作动器可同时起到结构阻尼、声阻尼及结构辐射模态振动控制力的作用,大部分质量来自于作动器线圈,是一种具有高输出功率、宽控制频带的DAVA装置。

图4 PVDF嵌入式DAVA装置
为了预测由多介质组成的DAVA结构在多物理场耦合下的产品性能,给DAVA设计改进提供有效手 段,美国NASA开展了DAVA的有限元仿真研究。 2000―2003年期间,Mathur、Chin等人[29-31]基于二维智能泡沫系统开展了三维模型的研究,首先建立了多孔弹性泡沫、声介质、弹性板、PVDF四部分的有限元方程。根据有限元耦合条件和主动控制方程,建立了智能泡沫的三维耦合有限元模型,通过有限元方法对DAVA周围声场进行了预示。智能泡沫主动降噪控制效果仿真结果对比如图10所示。在80 dB噪声激励下,与未控制相比,全局控制降噪量达10~40 dB。在选定区域,采用局域控制的效果要比全局控制效果更好。最终通过仿真预测的手段给DAVA装置的设计及改进提供了有力的支撑。

图6 多谐振DAVA装置

图7 DAVA参数

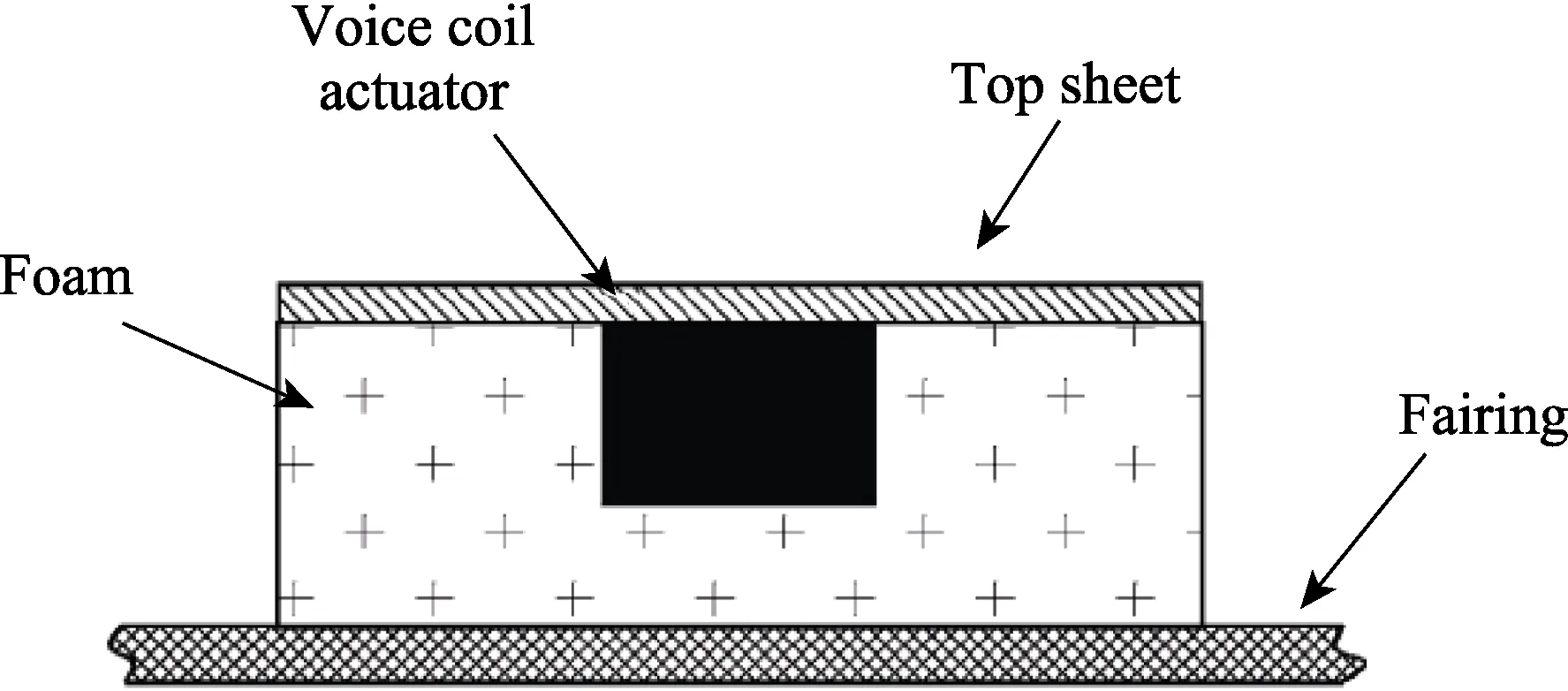
图9 高输出DAVA装置
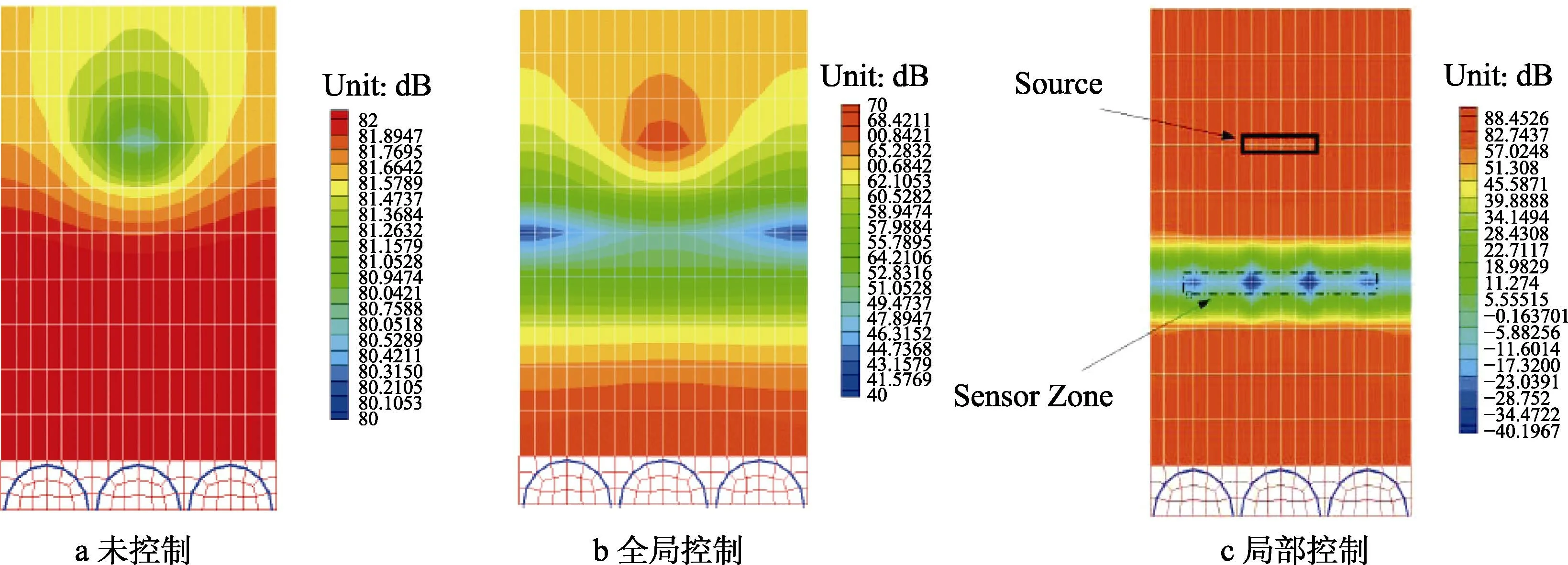
图10 智能泡沫主动降噪控制效果仿真结果对比
2004年,Wael等[32]开发了一种新型智能泡沫,被动泡沫层的一端与主动压电材料(Active Piezoelectric Damping Composites,APDC)相连,另一端与振动板表面相连,如图11所示。这样压电材料的一端可以控制孔隙率来改善吸声性能,一端可以抑制 结构的振动,从而实现在较宽频带上声振响应的抑制。在一维剪切变形理论的基础上建立了二维有限元模型,可以预示反馈控制下的振动与声场,同时也可以计算泡沫材料的吸声特性。
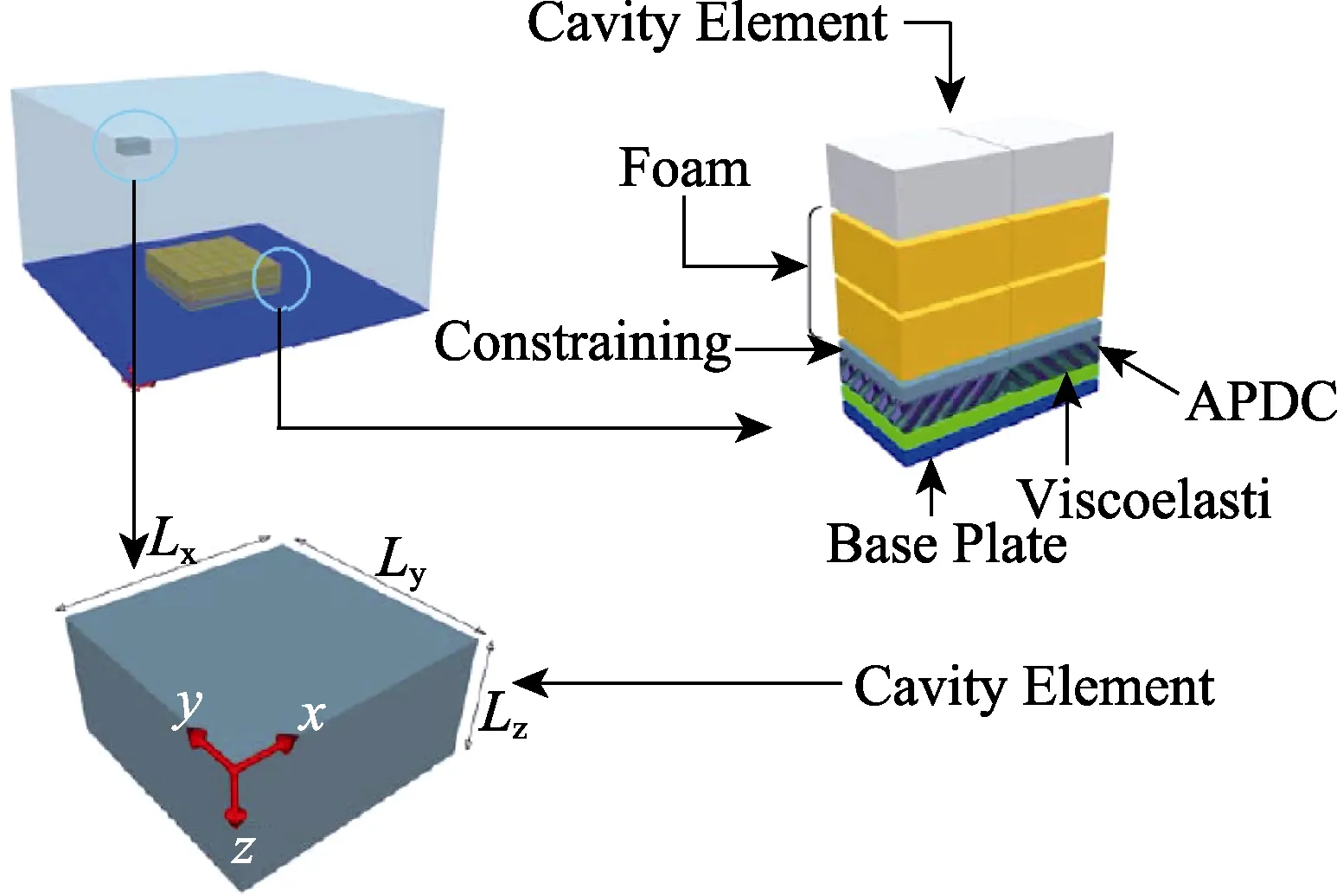
图11 新型智能泡沫结构
1.2 声场控制方法
1.2.1 ANC控制方法
ANC控制方法利用声源作为次级源,产生与原始声源幅值相等、相位相反的次级声源来抑制和抵消噪声。自适应噪声主动控制算法是ANC技术中最重要的部分,其中滤波最小均方算法(FxLMS)[33]因其运算量小、容易实现、物理机理清晰等优点在DAVA声场控制中应用广泛。
以图12所示前馈式单通道ANC系统为例,参考信号由麦克风输入,经过ANC控制系统处理后产生控制信号,驱动扬声器。误差麦克风用于监视ANC系统的性能,控制器的目的是使噪声最小化。采用离线辨识FxLMS算法解决次级通路问题的系统识别框图如图13所示。

图12 前馈式单通道ANC系统

图13 基于FxLMS算法的ANC系统框图
第n时刻的离散域中,x(n)为参考信号,P(z)为初级通路,C(z)为次级通路,d(n)为期望信号,C′(z)为次级通路模型,f(n)为x(n)经过C′(z)后的信号,W(z)为算法控制器,y(n)为W(z)输出的信号,e(n)为误差信号。当控制器采用L阶横向结构的FIR滤波器时:

式中:r(n)称作滤波-x信号矢量,与参考信号矢量的关系为:

误差传感器输入信号为:

控制滤波器中采用自适应加权函数的梯度下降算法如下:

式中:μ为收敛系数,用于控制收敛速度和系统稳定性。
对于航天飞行器内声场的控制,单通道主动控制(SISO)可能不能满足要求,因此采用多个DAVA来扩大降噪范围,完成多通道主动控制(MIMO)。
1.2.2 ASAC控制方法
ASAC控制方法由Fuller在20世纪80年代中期提出[34-35],其实质是ANC与振动主动控制(AVC)的有机结合,采用少量的力执行机构(如激振器、压电陶瓷等)作为DAVA作动器来有效抑制结构声辐射。采用声辐射模态来进行ASAC控制研究[36]。设振动结构单元表面上的声压为P,振速为v,则声功率W可表示为:

式中:ΔS表示每一单元的面积;Z表示每一单元上速度与对应表面声压之间的阻抗矩阵; R为实对称正定矩阵,。
令R = QΛQT,其特征值λ都为正数,对应的特征向量iq相互正交,声功率为:

令Ty Q v= ,则声功率又可以表示为:

式中:iy为第i阶声辐射模态伴随系数;iW为第i阶声辐射模态的声功率。可以看出,各阶辐射模态的声功率不仅仅与辐射效率有关,而且与模态幅度有关。
振速v可以表示为特征向量iq的线性组合:

基于声辐射模态的有源控制策略是要获得前N阶声辐射模态伴随系数 iy的信息。方程数N越少,运算时间越少,这样误差传感器策略的实时性能够得到保证。对式(9)采用模态截断,取模态数为P,振速v可以表示为:

两边分别乘以 qj(x),并求和得到:

采用最小模最小二乘法求解方程组的最佳逼近解ˆy:

将ˆy的N个系数作为前N 阶声辐射模态伴随系数 iy的近似值,是基于声辐射模态的误差传感器策略。
由于内声场是结构和内声腔的强耦合系统,结构声控制效果受外部噪声、结构动响应、声致振动、声场动响应等的影响,高效、稳定的控制算法是DAVA在航天器内声场控制中的重要部分。如采用FxLMS前馈与滑模反馈混合控制算法[37]等。
1.3 DAVA的应用
1999年,Guigou等[24]基于FxLMS前馈控制算法开展了机舱的主动降噪,采用模拟的湍流边界层进行激励,多个DAVA装置进行声场控制,如图14所示。通过对比250~1050 Hz激励下不同通道数量和不同误差传感器位置下的降噪量,验证了多通道MIMO控制的有效性,对比了扬声器信号、加速度信号和传声器信号等三种不同参考策略。结果表明,采用扬声器信号作参考,可以使降噪量多达15 dB,如图15所示。通过研究表明,传声器之间的空间相关并不是导致不同参考策略效果的原因,而是由于控制系统存在延迟时间的因果关系导致的。对比500~900 Hz和250~1050 Hz两种不同激励频带下三种参考策略的降噪量,说明随着频带带宽的增加,加速度参考的短时间延迟给控制系统带来了更大的不可预见性,从而造成控制性能的衰退。在此基础上,NASA LaRC、美国阿诺德工程发展中心(AEDC)、弗吉尼亚理工大学分别将DAVA应用于风洞气流激励下的真实飞行器的噪声控制[38-39],达到了较明显的降噪效果,如图16所示。
2001年,为了降低火箭起飞时在60~250 Hz中低频范围内的高声压级噪声,美国AFRL[4,27-28]采用 MIMO控制方法将DAVA应用在如图17所示的航天典型复合材料圆筒结构的内声场控制中。该圆筒结构由波音专为新型减振降噪装置的验证设计,为Delta火箭整流罩的缩比模型,选用碳纤维材料,并采用蜂窝夹心结构(如图18所示),直径2.46 m,长2.8 m。首先通过重复性试验找到了FxLMS控制算法最优收敛因子,同时发现控制信号的能力依赖于参考信号与激励源的相关性,为了得到更好的相关性,需要将参考传感器尽量接近激励源位置。其次建立了如图19所示的MIMO控制系统:两个扬声器单元产生激励信号,每个扬声器单元由8个NEOX B-1低音扩音器组成,位于圆柱两侧;8个MA5002功放,每个通道 提供2500 W的能量;4个外部传声器监控激励信号量级,15个内部传声器,其中12个为误差传感器,求和作为单个误差信号,3个作为监控传声器。结果表明:与激励源信号相关程度越大,降噪效果越好,并且局部降噪效果要优于全局降噪效果,采用MIMO控制效果要优于SISO控制效果,而且在低频时不会出现控制溢出的现象,如图20所示。以上控制措施都对第一阶声学共振频率峰值削弱效果不强,而且外界 声压级过高会导致作动器功率过大,影响使用性能。
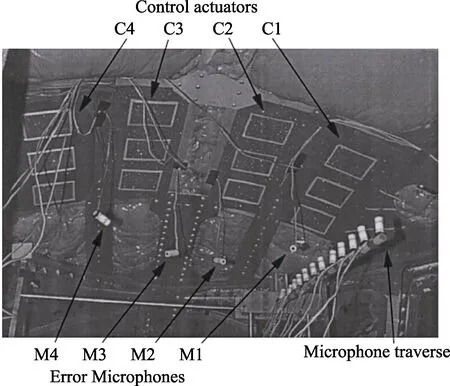
图14 机舱内部布置
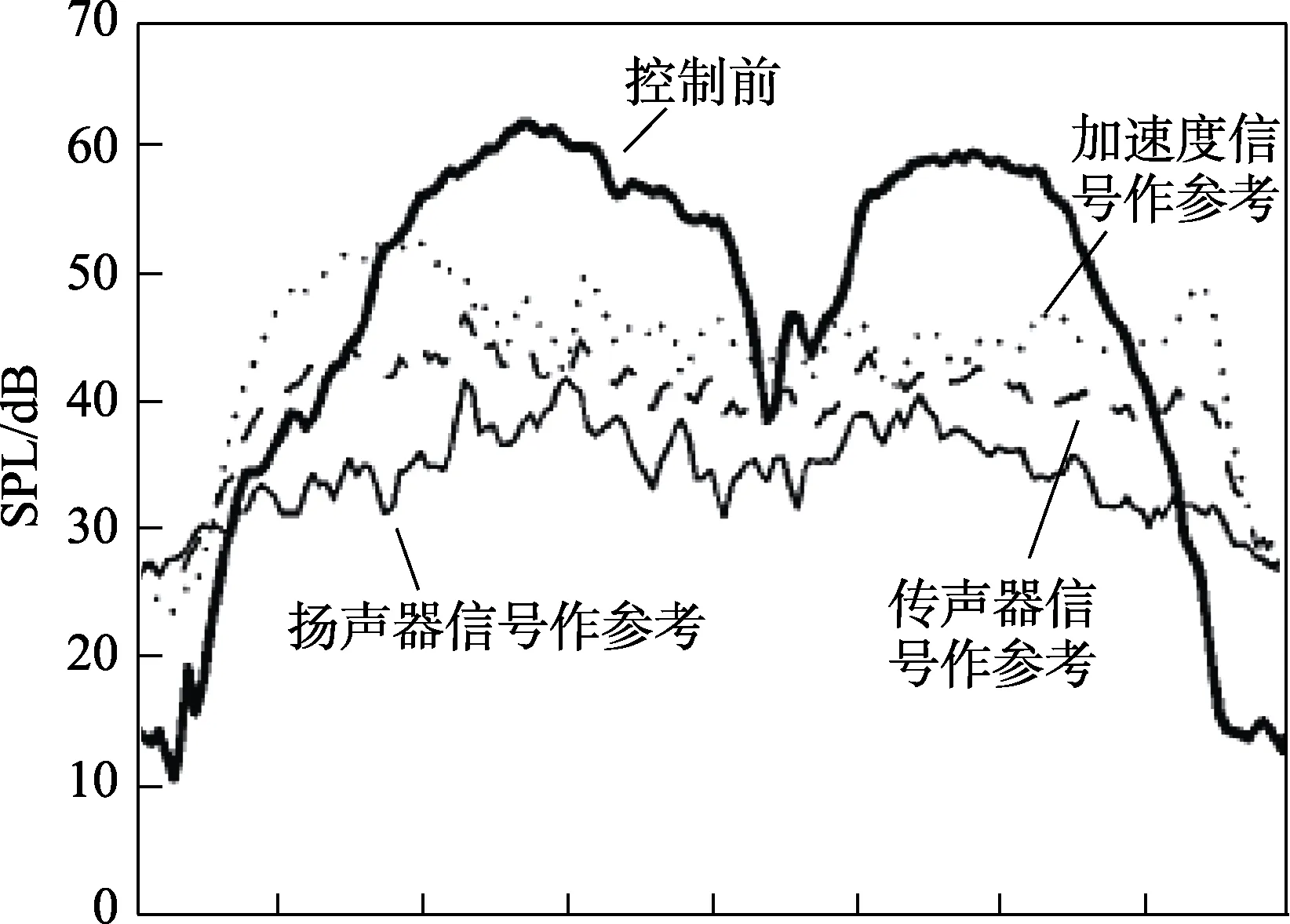
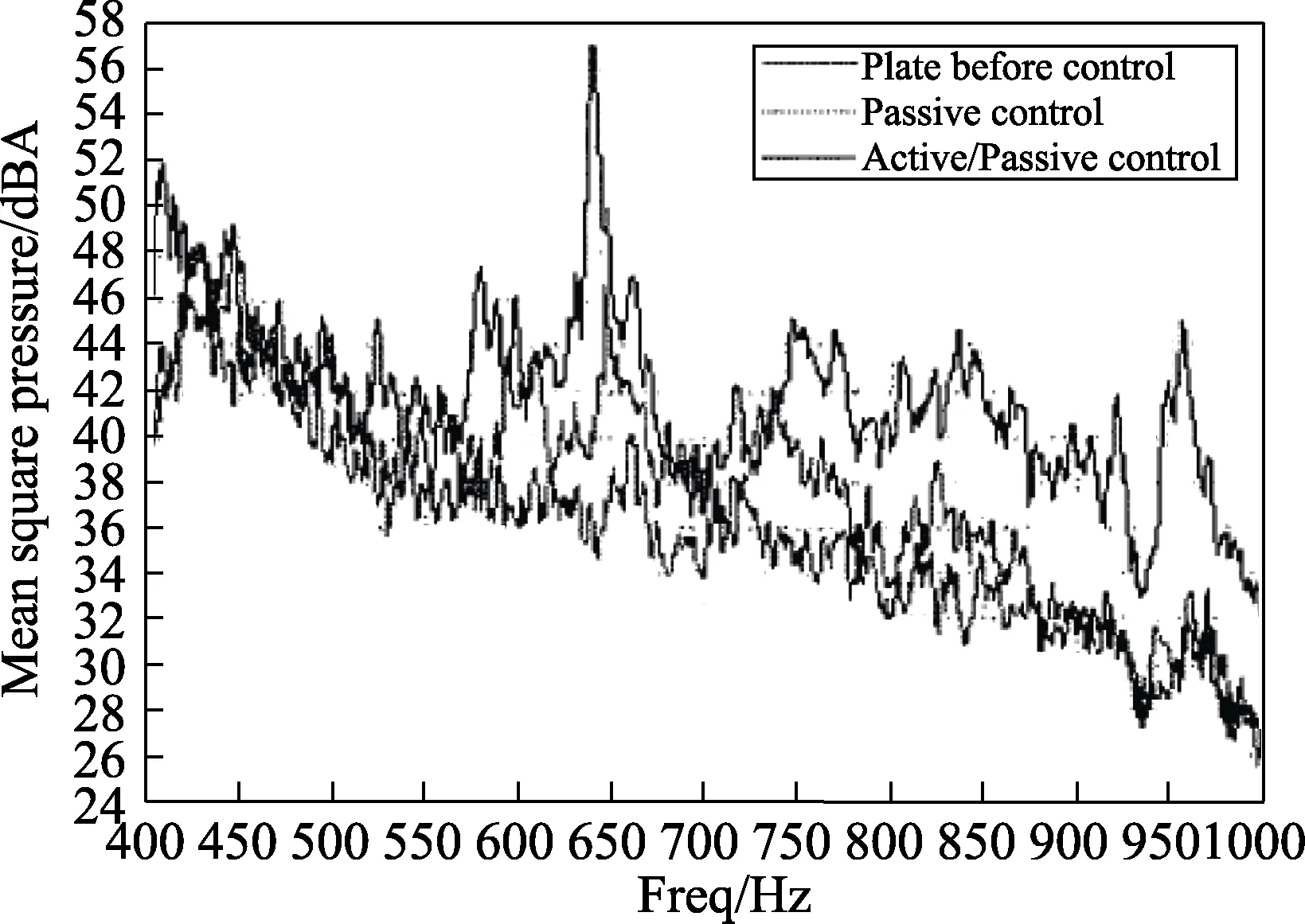
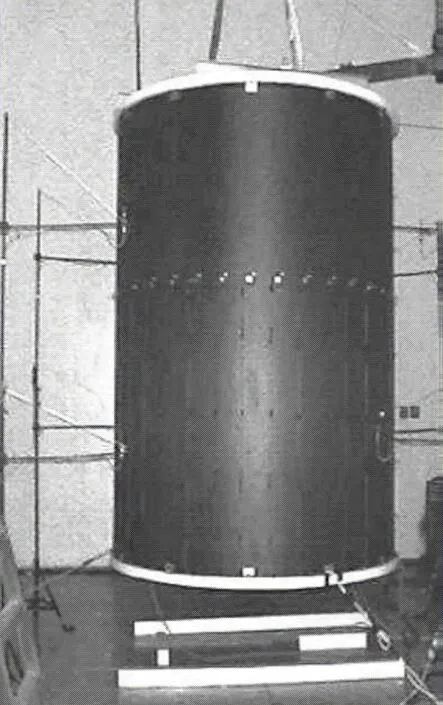
图17 复合圆筒结构
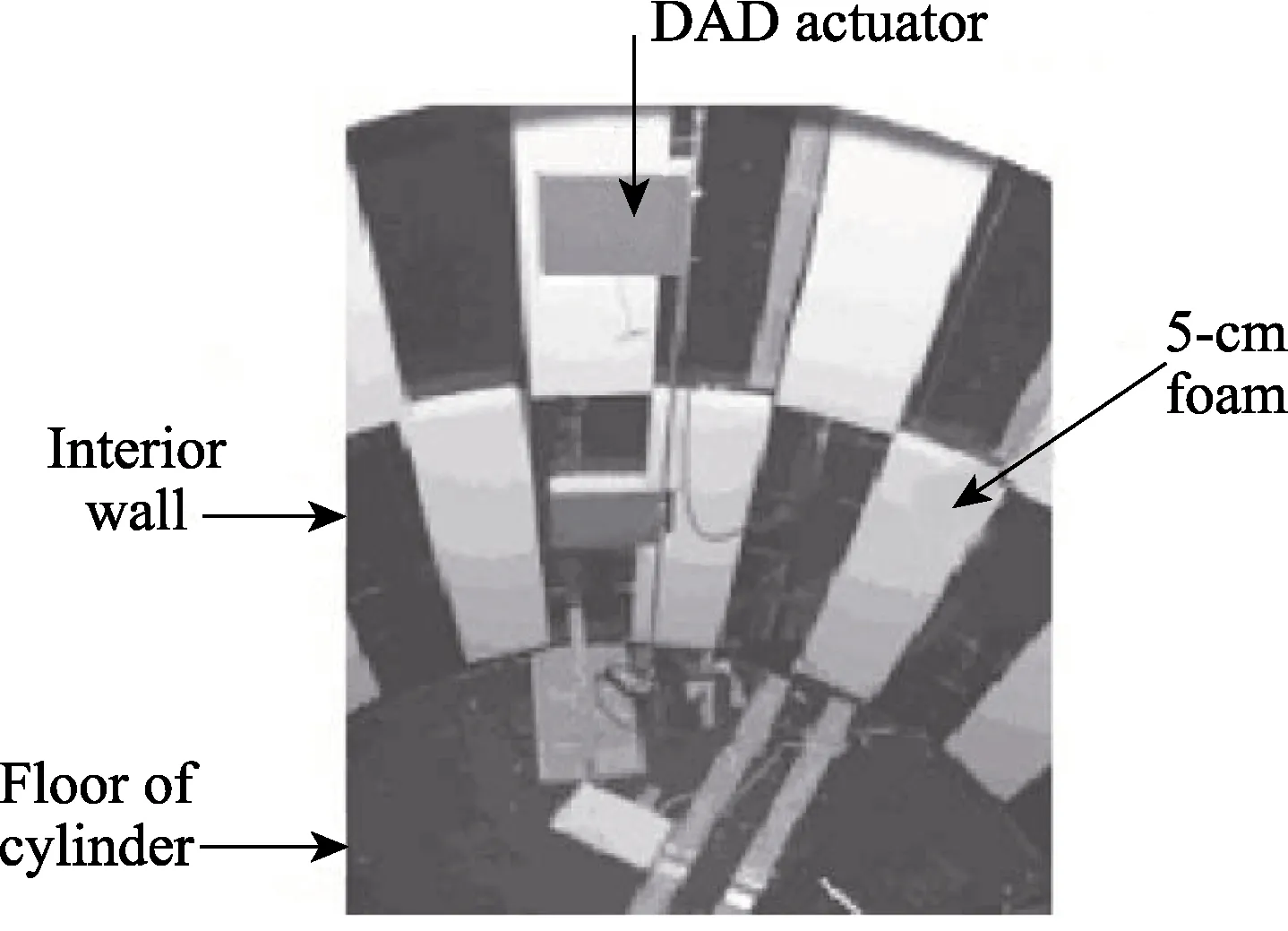


2004年,Sacarcelik[40]采用DAVA与主动轻质扬声器对波音设计的复合材料圆筒结构内部噪声进行了混合控制,其布置如图21、图22所示。4组DAVA布置于距底部1/3处,以更好地与结构前两阶轴向模态耦合[41],4组扬声器均匀布置于顶部。不同控制方法下误差传声器与输入电压传递函数对比如图23所示,在120 Hz处,只采用DAVA控制效果要强于扬声器控制;而在60 Hz处相反,两者混合控制可以在60~200 Hz带宽内降噪达3.2 dB;当采用合适的延迟作为算法参考信号时,降噪效果更加明显,如图24所示。



图23 不同控制方法下误差传声器与输入 电压传递函数对比

2 DAVA研制中存在的问题
1)PVDF薄膜电驱动发声的多物理场耦合问题。研究表明,PVDF薄膜的声灵敏度可达120 dB[42],与高压放大器配合会获得更高的声压级,因此插入PVDF薄膜要比添加作动器的DAVA更加轻质高效。美国NASA已经开展了相关数值仿真研究,但在“智能泡沫”设计中存在复杂的电-机械-声多物理场耦合问题,而且PVDF薄膜的发声效率受厚度、曲率等结构参数的影响很大,对DAVA的设计带来很大的挑战。
2)复杂声场环境下的控制问题。航天器内部结构与高量级声场耦合形成了复杂的高维系统,导致了物理模型、控制模型的高度不确定性。国外基于FxLMS自适应前馈算法开发了用于航天器内声场控制的MIMO系统,但次级通道建模还不够精确,控制策略还不够完善,在复杂声场环境下直接将DAVA应用于航天器内声场控制的稳定性不高。
3)声能转换问题。航天器所处的高量级声场需要DAVA输出较大的功率来控制抵消,要求使用更多更复杂的供电系统,满足过高的功率消耗。因此如何深入其声能转化机理,提高其声能转化效率,也是后续应重点研究的问题。
3 声场控制研究
在混响场环境下开展了火箭整流罩结构内声场控制仿真研究,采用最小二乘主动控制策略,在定点处实现了火箭整流罩结构内声场的有效控制,如图25所示。随后开展了自适应滤波算法的特性研究,基于归一化泄露FXLMS算法实现了快速控制原型开发,并开展了如图26所示单输入单输出的噪声主动控制实验,能够将空间一点处的随机噪声降低至背景噪声,结果如图27所示。

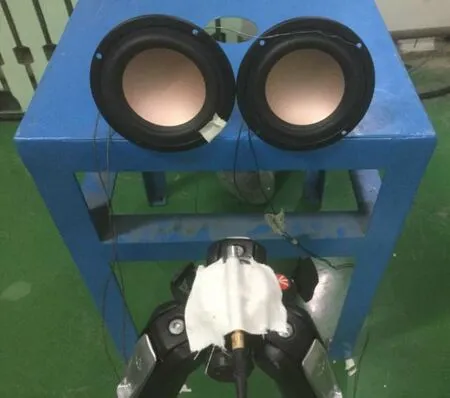

图27 主动降噪效果
4 结语
作为一种新型的声场智能控制装置,DAVA以其小型、轻质、宽带、高输出力等优点,已经逐步在航天器内声场控制应用中取得了进展。NASA、AFRL、弗吉尼亚理工大学等国外机构在作动器类型、结构形式和仿真预示等方面对DAVA进行了不断改进,并以ANC及ASAC两大声场主动控制技术为基础,开展了航天器结构的内声场控制研究。为了对航天器发射阶段声振环境载荷进行控制,提高可靠性,降低发射失败的风险,我国有必要开展DAVA智能结构产品的研制工作,为我国新一代航天飞行器的内噪声控制提供保障。当前,DAVA装置的研制仍存在多物理场耦合、控制稳定性、功率消耗等诸多问题需要解决。因此需要发展我国航天器空间噪声主动控制技术,以适应航天领域的不断发展。
目前,我国在运载火箭整流罩内噪声控制中仍然采用被动降噪的方法。文中初步开展了声场控制的仿真和试验研究,实现了定点处声场主动控制。对于航天飞行器内声场的控制,单通道主动控制可能不能满足要求,需要进一步开展多通道主动控制方法的研究。最终应用主被动一体化的DAVA装置,使飞行器的内部噪声环境得到显著改善。
